







 CAN(Controller Area Network)是一种串行通信总线,主要用于汽车控制部件间的数据交换。该协议采用载波监听多路访问和非破坏性总线仲裁技术,支持最高5Mbps的速率和10km的通信距离。本文档依据ISO 11898-2 2016标准,详细阐述了CAN总线的输出电平规范、接收电平规范以及不同速率下的时序要求。
CAN(Controller Area Network)是一种串行通信总线,主要用于汽车控制部件间的数据交换。该协议采用载波监听多路访问和非破坏性总线仲裁技术,支持最高5Mbps的速率和10km的通信距离。本文档依据ISO 11898-2 2016标准,详细阐述了CAN总线的输出电平规范、接收电平规范以及不同速率下的时序要求。
一、说明
CAN(Controller area network)中文名称是控制器局域网,是用于解决汽车众多控制部件之间的数据交换而开发的一种串行数据通信总线,可以使用双绞线来传输信号,由德国博世公司在20世纪80年代专门为汽车行业开发。
其特点有:
-
总线上节点不分主从
-
采用载波监听多路访问、逐位仲裁的非破坏性总线仲裁技术。
-
直接通信距离最远10km,速率50Kb/s
-
通信速率最高可达5Mb/s,距离40m
-
末端要有120欧终端电阻
本文档基于ISO 11898-2 2016版本,最高支持速率5Mbps。
二、协议要求
CAN总线共有两根线:CAN_H和CAN_L,CAN信号就是CAN_H-CAN_L得来的,有2个状态:显性(Dominant)和隐性(recessive),如下: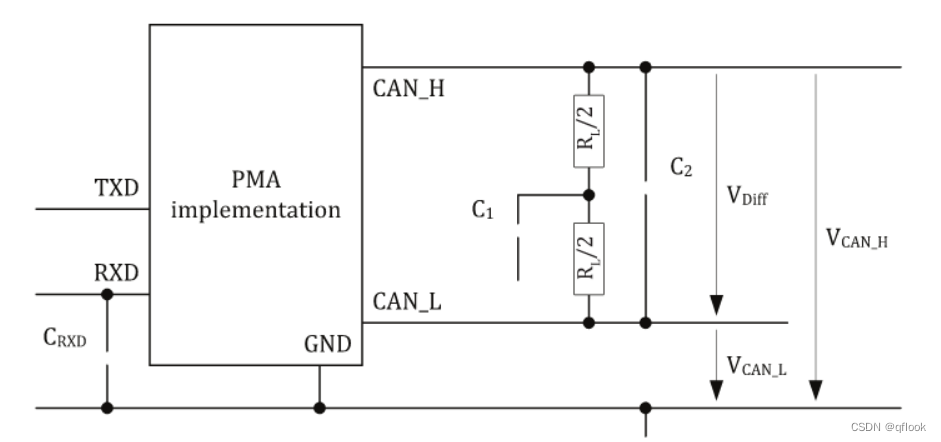
1、输出电平规范
显性输出电平要求如下,正常Vdiff范围1.5V

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 789
789

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











