






一、产品简介
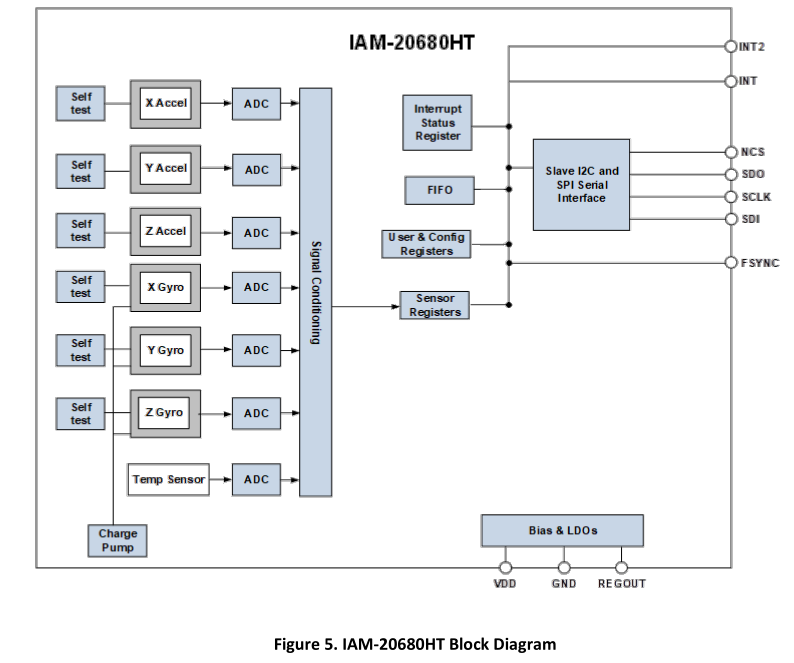
IAM-20680HT是一款适用于汽车非安全应用的6轴运动跟踪设备,它将3轴陀螺仪和3轴加速计集成在一个3x3x0.75mm3(16针LGA)封装中。它还具有4096字节的FIFO的buffer,可以允许处理器突发读取传感器数据,从而实现芯片的低功耗。
陀螺仪支持通过寄存器配置选择量程,包括 ±250 dps, ±500 dps, ±1000 dps, 和 ±2000 dps。加速计也可以配置量程:2g, ±4g, ±8g,和±16g。当然芯片还有其他业界领先的功能,16位的ADC、可配置的数字滤波器、嵌入式温度传感器(die的温度)和可配置中断。
通信接口支持400k的快速模式I2C以及8MHz的SPI。
芯片框图:
二、推荐应用场景
-
导航系统的辅助工具
-
升降门运动检测
-
摄像头稳定和视觉系统
-
HUD
-
汽车报警器
-
保险车辆追踪
-
远程信息处理
三、主要特征
1.陀螺仪
-
数字输出、4档量程可配置以及集成16位ADC
-
可配置低通数字滤波器
-
工厂已校准灵敏度比例因子
-
支持自检
2.加速计
-
数字输出、4档量程可配置以及集成16位ADC
-
两个可配置中断
-
低功耗模式支持WOM运动唤醒终端
-
支持自检
3.其他特征
-
特别小的LGA封装:3x3x0.75 mm3
-
最小化陀螺仪和加速计之间串扰灵敏度
-
4096字节的FIFO buffer支持突发读取传感器数据
-
数字输出的温度传感器(die的温度)
-
陀螺仪、加速计和温度传感器均支持可配置的数字滤波器
-
耐10000g的冲击
-
所有寄存器都支持400KHz的快速模式I2C和8MHz的SPI通信
-
符合RoHS和绿色标准
四、电气特性
1.陀螺仪
测试条件:VDD = 1.8V, VDDIO = 1.8V, T A = 25°C, Full Scale = 2000dps, Low-Noise Mode

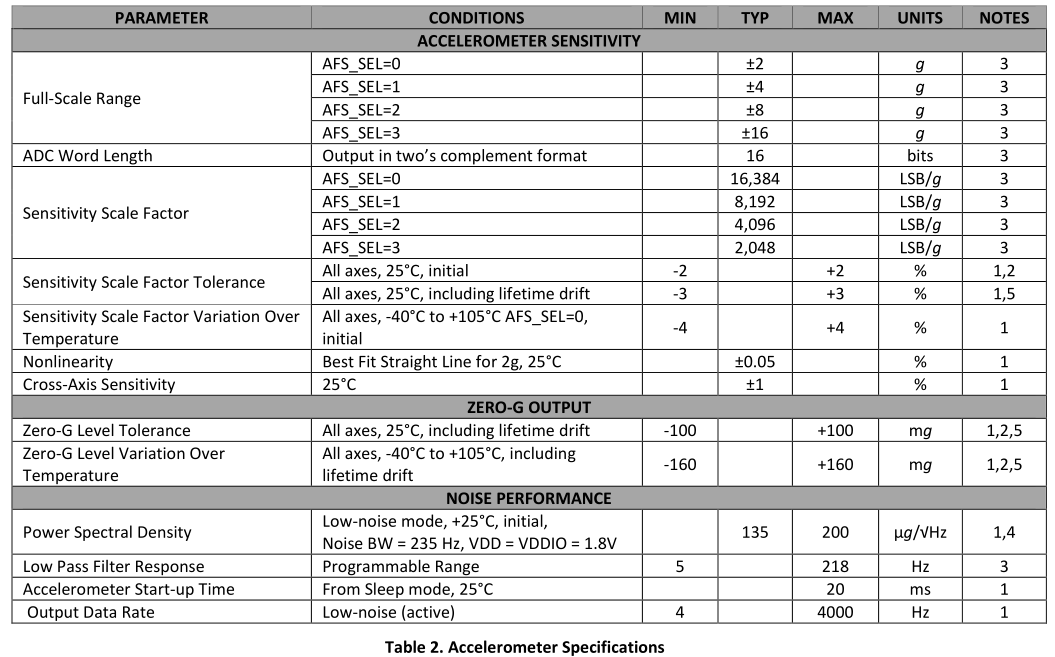
2.加速计
条件:VDD = 1.8V, VDDIO = 1.8V, T A = 25°C, Full Scale = 8g, Low-Noise Mode
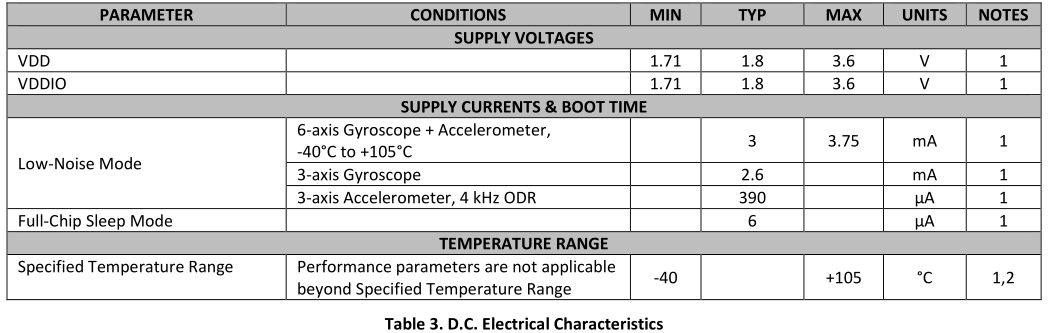
3.直流电气特性
条件:VDD = 1.8V, VDDIO = 1.8V, T A = 25°C, Low-Noise Mode
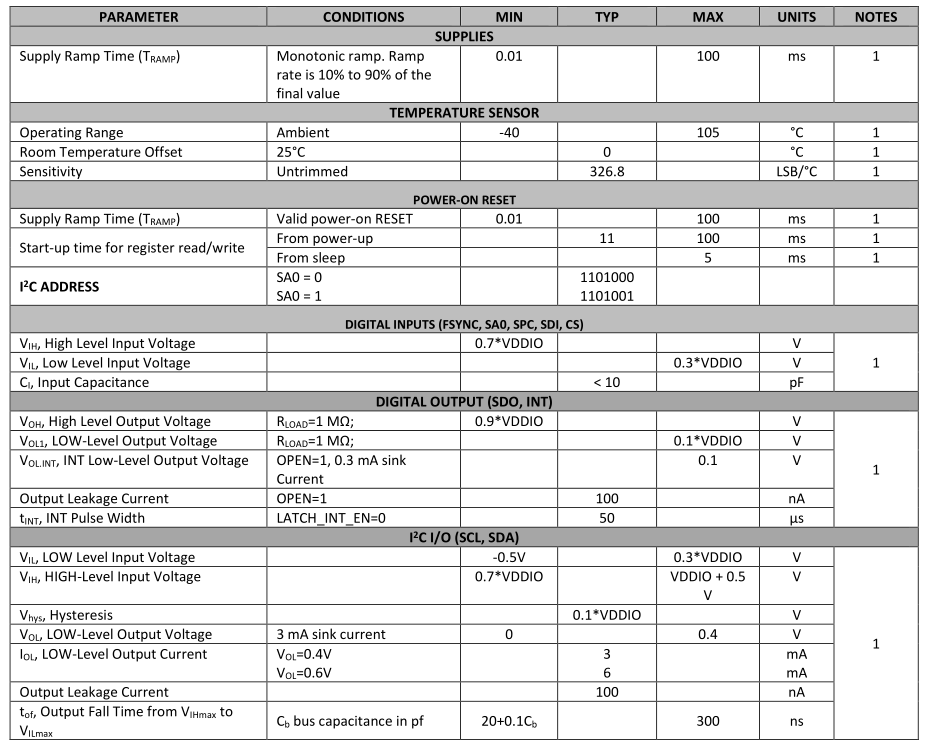
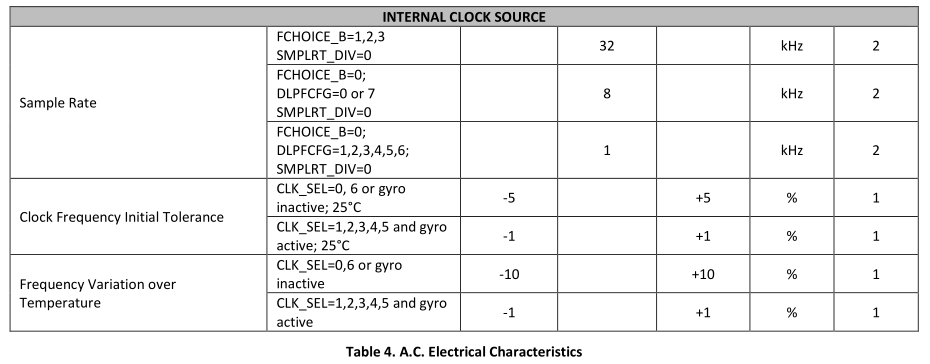
4.交流电气特性
条件: VDD = 1.8V, VDDIO = 1.8V, T A = 25°C
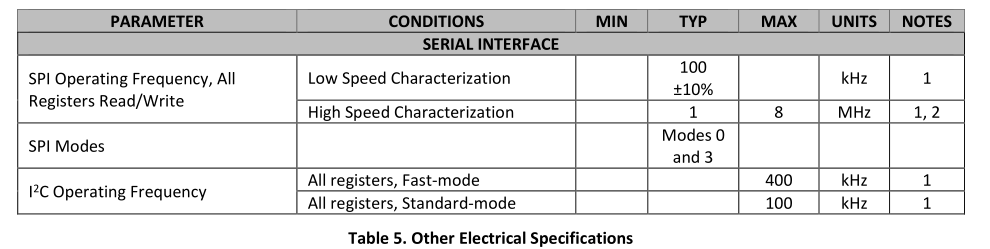
5.通信电气特性
I2C和SPI支持的模式及对应速率。
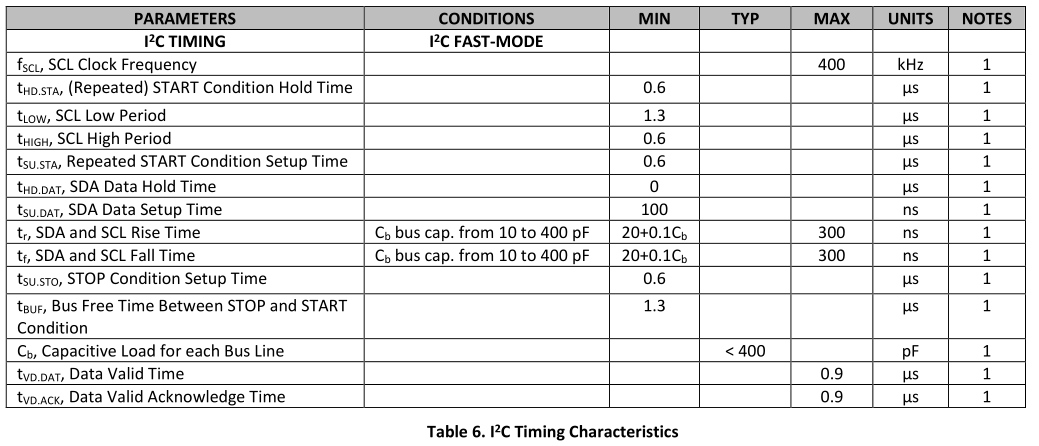
1)I2C时序
测试条件:VDD = 1.8V, VDDIO = 1.8V, T A = 25°C。需注意规格书仅提供了快速模式的时序参数,标准模式的可以参考I2C标准文档,之前也写过,有兴趣的可以往前翻翻公众号文章或者去CSDN查看。
时序参数要求:
时序图:
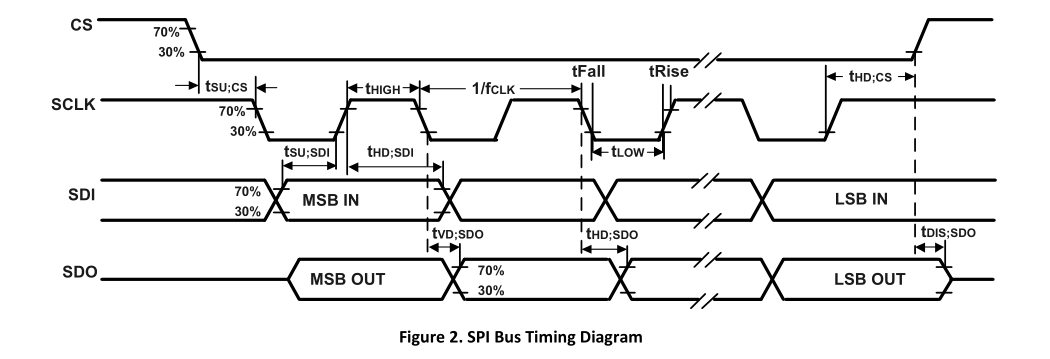
2)SPI时序
测试条件: VDD = 1.8V, VDDIO = 1.8V, T A = 25°C,
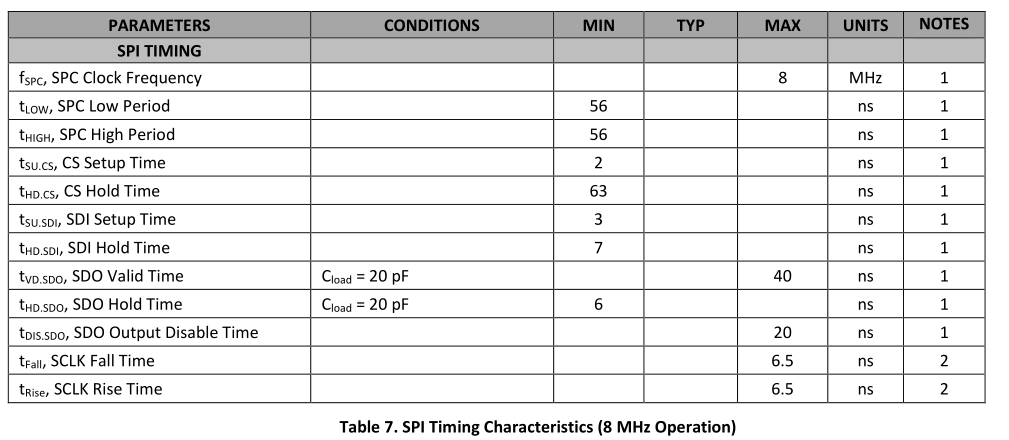
时序图:
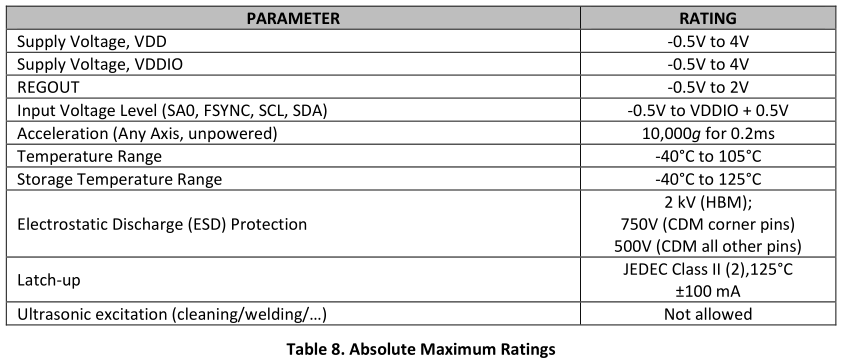
6.绝对最大参数范围
超过下表范围可能导致芯片损坏,以及不能长时间运行在最大参数情景下,否则会导致可靠性下降。
7.热阻

五、管脚定义
封装以及各轴极性:
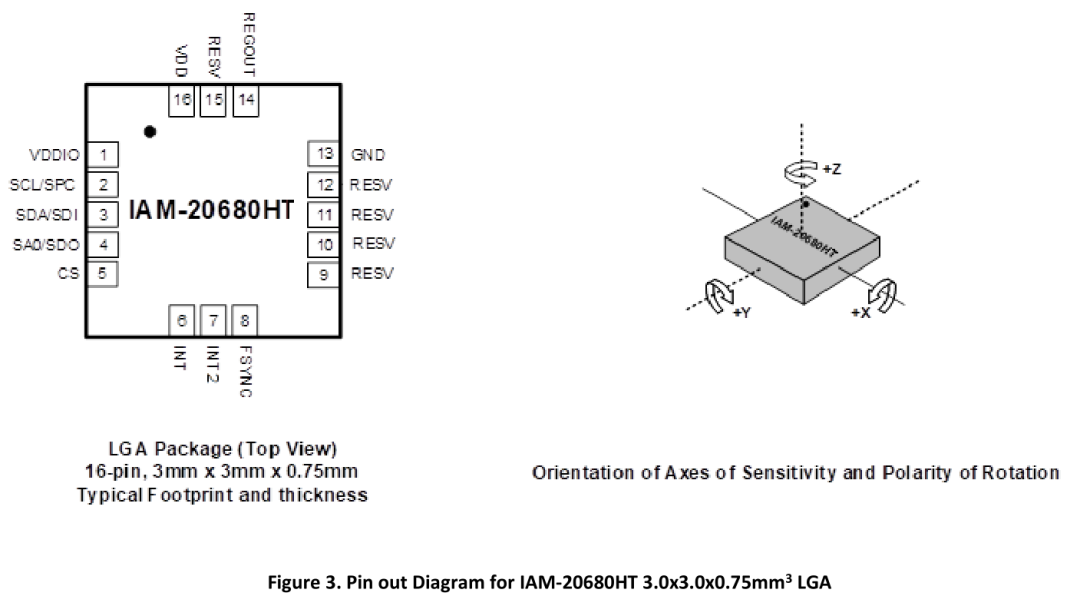
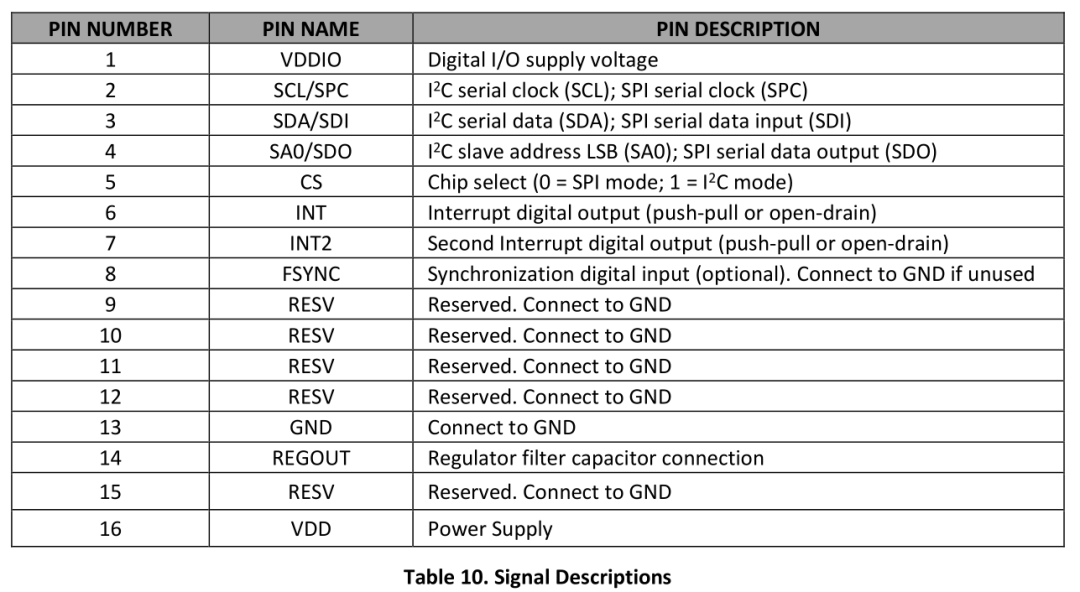
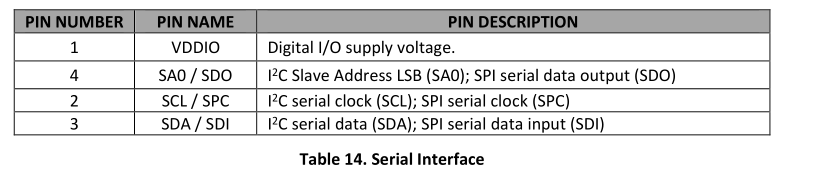
各管脚定义:
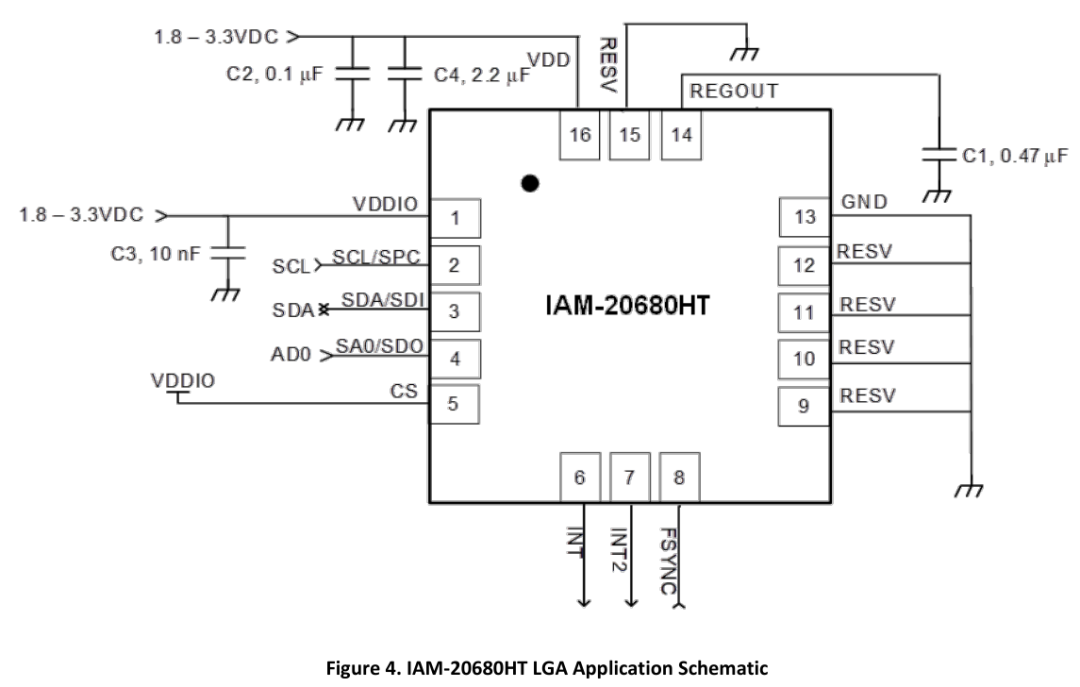
芯片典型应用原理图(使用的是I2C通信):
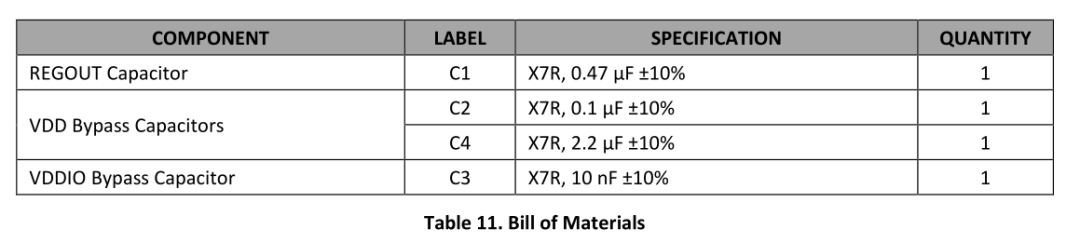
外围器件的BOM清单:
六、详细说明
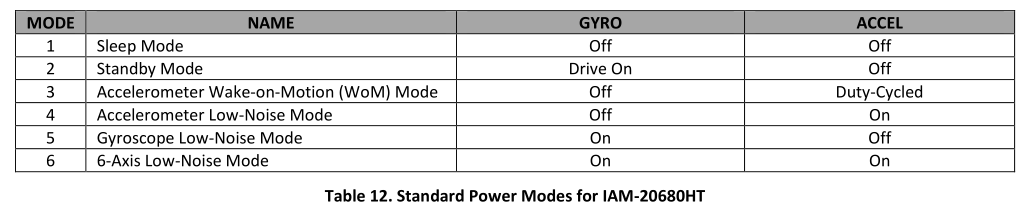
1.工作模式
芯片可配置各种模式,及对应陀螺仪、加速计的工作情况:
2.上电时序
VDD上电过程内部电路开始复位,要求本过程CS和SCL/SPC管脚为低电平;如果芯片通信模式为I2C,则允许CS高电平,SCL/SPC管脚必须为低电平。因此不论何种模式上电过程要避免SCL/SPC信号电平为高。
如果上电时序不符合要求,可能导致数字接口初始化异常,需要在电源稳定后进行软复位操作(PWR_MGMT_1 寄存器设置为0x81),同时需注意,由于数字接口初始化异常,也许会导致通过I2C配置寄存器时无ack应答信号。
另外在交流电气特性中有要求,供电上升时间(10%~90%)要在0.01ms~100ms之间,且上升过程单调无回勾等不良现象。
推荐整个上电过程:上电完成后马上进行软复位、选择最佳时钟源,然后进行输出数据速率设置,量程设置,滤波器设置,以及最后进行工作模式配置。
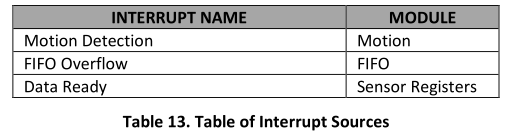
3.中断
芯片INT支持3种中断类型,每种都可以单独启用或者关闭:
1)运动唤醒WOM中断
芯片支持运动检测能力,超过设置的阈值即可触发。配置本中断的步骤:
配置加速计工作:PWR_MGMT_1 寄存器(0x6B) 设置ACCEL_CYCLE = 0, SLEEP = 0, 和GYRO_STANDBY = 0;
配置加速计:ACCEL_CONFIG2寄存器(0x1D)设置ACCEL_FCHOICE_B = 0和A_DLPF_CFG[2:0] = b111;
使能运动中断: INT_ENABLE寄存器(0x38)设置WOM_INT_EN[2:0] = b111;
设置阈值:通过ACCEL_WOM_THR寄存器 (0x1F)进行设置;
使能加速计硬件智能:ACCEL_INTEL_CTRL寄存器(0x69)设置ACCEL_INTEL_EN = 1和ACCEL_INTEL_MODE = 1 以及第1位设置为0;
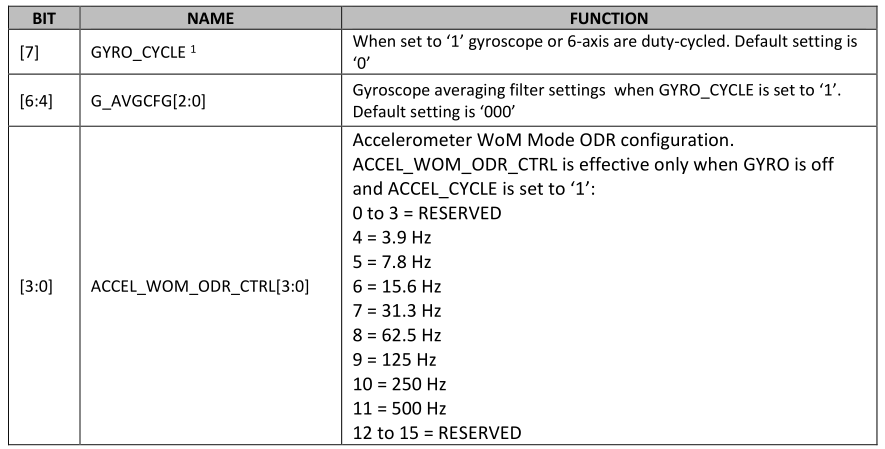
设置WOM中断ODR(输出数据速率):根据需要进行LP_MODE_CFG 寄存器(0x1E)设置ACCEL_WOM_ODR_CTRL[3:0],
使能循环模式: PWR_MGMT_2寄存器(0x6C)设置STBY_XA = STBY_YA = STBY_ZA = 0, 和STBY_XG = STBY_YG = STBY_ZG = 1,同时 PWR_MGMT_1寄存器(0x6B)设置ACCEL_CYCLE = 1。
4.通信接口
芯片可通过CS管脚配置通信模式,以及在I2C或SPI通信下复用I/O的功能:
1)I2C通信
如使用I2C通信时(CS=1),芯片只能为slave,最大速率支持到400KHz。支持7位地址:110100X,其中最后一位可通过SA0/SDO配置,如SA0=0是,最后一位为0,SA0=1则最后一位为1。这样就可以允许2个芯片挂在同一路I2C上。
单字节写的I2C格式:

突发字节写的I2C格式:

单字节读的I2C格式:

突发字节读的I2C格式:

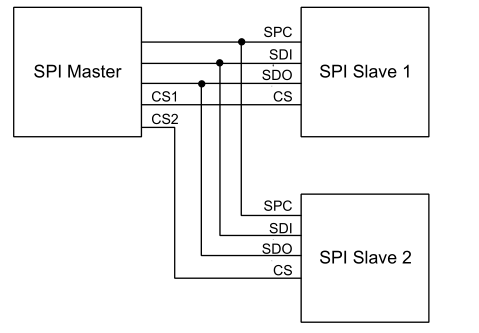
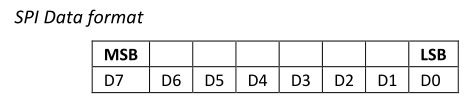
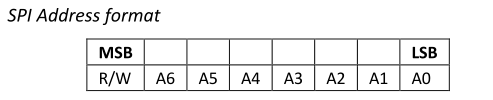
2)SPI通信
当使用SPI通信(CS=0)时,芯片只能作为Slave设备,通信速率最高8MHz,最多支持同一路SPI挂2个本芯片:
SPI通信特征:
-
先发送高位后发低位;
-
上升沿采样,下降沿发送数据;
-
最大速率8MHz;
-
读写操作最少需要16个时钟周期;
-
第一个字节是设备地址和读/写控制位(1读0写):
-
支持单字节或突发读写操作。
七、寄存器说明
不写软件,本部分忽略。
















 2141
2141

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











