










我先简单概括一下,后续我再详细总结:文件“NRELOffshrBsline5MW_Onshore_ServoDyn.dat”是用于NREL 5.0 MW基准风力发电机的ServoDyn模块的输入文件。它定义了仿真控制、变桨控制、发电机和扭矩控制、偏航控制以及输出设置等各种参数。以下是主要内容的总结:
-
文件头部信息:
- 提供了文件版本、风力发电机型号和数据来源等基本信息。
-
模拟控制:
- 包含是否回显输入数据和控制器通信间隔等仿真控制参数。
-
变桨控制:
- 定义了变桨控制模式、启动变桨控制的时间、覆盖变桨操作的时间和速率以及叶片的最终变桨角度。
-
发电机和扭矩控制:
- 包括变速控制模式、发电机模型、发电机效率、启动和停止发电机的方法以及相关参数。
-
简单变速扭矩控制:
- 当使用简单变速发电机控制时,定义了额定发电机速度、扭矩和滑移百分比等参数。
-
简单感应发电机:
- 当使用简单感应发电机模型时,定义了定子和转子电阻、同步速度、额定扭矩和拉出比率等参数。
-
Thevenin等效感应发电机:
- 当使用Thevenin等效感应发电机模型时,定义了电网频率、极对数、定子和转子电阻、漏抗和磁化电抗等参数。
-
高速轴制动:
- 包含高速轴制动模型、启动和完全展开制动器的时间以及制动力矩等参数。
-
机舱偏航控制:
- 定义了偏航控制模式、启动偏航控制的时间、中性偏航位置、偏航弹簧和阻尼常数、覆盖偏航操作的时间和速率以及最终偏航角度。
-
调谐质量阻尼器:
- 包含是否计算机舱和塔的调谐质量阻尼器以及相关文件的名称。
-
Bladed接口:
- 定义了动态库的名称和位置、输入文件名称、调用过程名称、通信间隔时间、是否使用线性斜坡、桨距低通滤波器的截止频率、参考偏航角度以及相关控制和设定值。
-
Bladed接口扭矩-速度查找表:
- 定义了扭矩-速度查找表中的点数和相应的扭矩-速度对。
-
输出设置:
- 包含是否打印摘要数据、输出文件的位置、是否使用制表符分隔、文本表格输出的格式、开始输出的时间以及输出参数列表。
OPenFast
一. 第一段
1. 文件头部信息
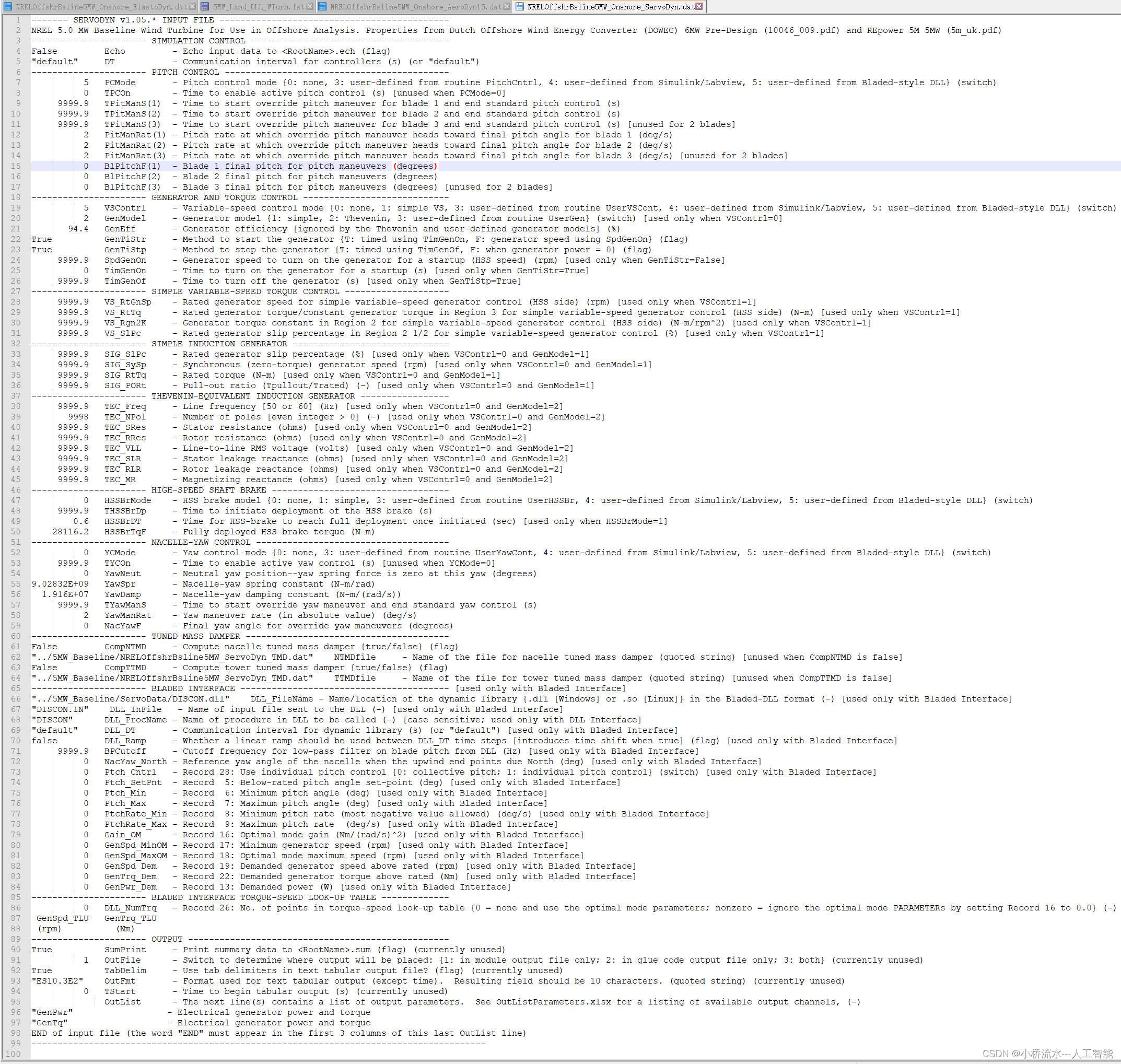
------- SERVODYN v1.05.* INPUT FILE --------------------------------------------
NREL 5.0 MW Baseline Wind Turbine for Use in Offshore Analysis. Properties from Dutch Offshore Wind Energy Converter (DOWEC) 6MW Pre-Design (10046_009.pdf) and REpower 5M 5MW (5m_uk.pdf)
解释: 这是一个ServoDyn模块的输入文件,用于NREL 5.0 MW基准风力发电机的离岸(陆上)分析。其属性基于Dutch Offshore Wind Energy Converter (DOWEC) 6MW的预设计和REpower 5M 5MW的资料。
2. 模拟控制
---------------------- SIMULATION CONTROL --------------------------------------
False Echo - Echo input data to <RootName>.ech (flag)
"default" DT - Communication interval for controllers (s) (or "default")
解释:
Echo:False表示不将输入数据回显到<RootName>.ech文件。DT: 控制器的通信间隔时间(秒)。设为"default"表示使用默认值。
3. 变桨控制
---------------------- PITCH CONTROL -------------------------------------------
5 PCMode - Pitch control mode {0: none, 3: user-defined from routine PitchCntrl, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)
0 TPCOn - Time to enable active pitch control (s) [unused when PCMode=0]
9999.9 TPitManS(1) - Time to start override pitch maneuver for blade 1 and end standard pitch control (s)
9999.9 TPitManS(2) - Time to start override pitch maneuver for blade 2 and end standard pitch control (s)
9999.9 TPitManS(3) - Time to start override pitch maneuver for blade 3 and end standard pitch control (s) [unused for 2 blades]
2 PitManRat(1) - Pitch rate at which override pitch maneuver heads toward final pitch angle for blade 1 (deg/s)
2 PitManRat(2) - Pitch rate at which override pitch maneuver heads toward final pitch angle for blade 2 (deg/s)
2 PitManRat(3) - Pitch rate at which override pitch maneuver heads toward final pitch angle for blade 3 (deg/s) [unused for 2 blades]
0 BlPitchF(1) - Blade 1 final pitch for pitch maneuvers (degrees)
0 BlPitchF(2) - Blade 2 final pitch for pitch maneuvers (degrees)
0 BlPitchF(3) - Blade 3 final pitch for pitch maneuvers (degrees) [unused for 2 blades]
解释:
PCMode: 变桨控制模式,设为5表示使用Bladed样式的DLL(动态链接库)。TPCOn: 启用主动变桨控制的时间(秒),在PCMode=0时不使用。TPitManS(1)、TPitManS(2)、TPitManS(3): 分别为第1、第2、第3片叶片启动覆盖变桨操作并结束标准变桨控制的时间(秒),设为9999.9表示不启用。PitManRat(1)、PitManRat(2)、PitManRat(3): 覆盖变桨操作期间,第1、第2、第3片叶片向最终变桨角度推进的变桨速率(度/秒)。BlPitchF(1)、BlPitchF(2)、BlPitchF(3): 第1、第2、第3片叶片变桨操作的最终变桨角度(度),均设为0。
二. 第2段
发电机和扭矩控制
---------------------- GENERATOR AND TORQUE CONTROL ----------------------------
5 VSContrl - Variable-speed control mode {0: none, 1: simple VS, 3: user-defined from routine UserVSCont, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)
2 GenModel - Generator model {1: simple, 2: Thevenin, 3: user-defined from routine UserGen} (switch) [used only when VSContrl=0]
94.4 GenEff - Generator efficiency [ignored by the Thevenin and user-defined generator models] (%)
True GenTiStr - Method to start the generator {T: timed using TimGenOn, F: generator speed using SpdGenOn} (flag)
True GenTiStp - Method to stop the generator {T: timed using TimGenOf, F: when generator power = 0} (flag)
9999.9 SpdGenOn - Generator speed to turn on the generator for a startup (HSS speed) (rpm) [used only when GenTiStr=False]
0 TimGenOn - Time to turn on the generator for a startup (s) [used only when GenTiStr=True]
9999.9 TimGenOf - Time to turn off the generator (s) [used only when GenTiStp=True]
解释:
VSContrl: 变速控制模式,设为5表示使用Bladed样式的DLL(动态链接库)。GenModel: 发电机模型,设为2表示使用Thevenin模型。这只在VSContrl=0时使用。GenEff: 发电机效率,设为94.4%,在使用Thevenin和自定义发电机模型时被忽略。GenTiStr: 发电机启动的方法,设为True表示使用TimGenOn进行定时启动,设为False表示使用SpdGenOn的发电机速度启动。GenTiStp: 发电机停止的方法,设为True表示使用TimGenOf进行定时停止,设为False表示当发电机功率为0时停止。SpdGenOn: 发电机启动的速度(高转速轴速度,单位:转/分钟),只在GenTiStr=False时使用。设为9999.9表示不使用速度启动。TimGenOn: 发电机启动的时间(秒),只在GenTiStr=True时使用,设为0表示立即启动。TimGenOf: 发电机停止的时间(秒),只在GenTiStp=True时使用,设为9999.9表示不使用定时停止。
三,第3段
简单变速扭矩控制
---------------------- SIMPLE VARIABLE-SPEED TORQUE CONTROL --------------------
9999.9 VS_RtGnSp - Rated generator speed for simple variable-speed generator control (HSS side) (rpm) [used only when VSContrl=1]
9999.9 VS_RtTq - Rated generator torque/constant generator torque in Region 3 for simple variable-speed generator control (HSS side) (N-m) [used only when VSContrl=1]
9999.9 VS_Rgn2K - Generator torque constant in Region 2 for simple variable-speed generator control (HSS side) (N-m/rpm^2) [used only when VSContrl=1]
9999.9 VS_SlPc - Rated generator slip percentage in Region 2 1/2 for simple variable-speed generator control (%) [used only when VSContrl=1]
解释:
VS_RtGnSp: 简单变速发电机控制下的额定发电机速度(高转速轴侧,单位:转/分钟),仅在VSContrl=1时使用。设为9999.9表示不使用。VS_RtTq: 简单变速发电机控制下的额定发电机扭矩/在Region 3中的恒定发电机扭矩(高转速轴侧,单位:牛顿·米),仅在VSContrl=1时使用。设为9999.9表示不使用。VS_Rgn2K: 简单变速发电机控制下Region 2中的发电机扭矩常数(高转速轴侧,单位:牛顿·米/转^2),仅在VSContrl=1时使用。设为9999.9表示不使用。VS_SlPc: 简单变速发电机控制下Region 2 1/2中的额定发电机滑移百分比(%),仅在VSContrl=1时使用。设为9999.9表示不使用。
简单感应发电机
---------------------- SIMPLE INDUCTION GENERATOR ------------------------------
9999.9 SIG_SlPc - Rated generator slip percentage (%) [used only when VSContrl=0 and GenModel=1]
9999.9 SIG_SySp - Synchronous (zero-torque) generator speed (rpm) [used only when VSContrl=0 and GenModel=1]
9999.9 SIG_RtTq - Rated torque (N-m) [used only when VSContrl=0 and GenModel=1]
9999.9 SIG_PORt - Pull-out ratio (Tpullout/Trated) (-) [used only when VSContrl=0 and GenModel=1]
解释:
SIG_SlPc: 简单感应发电机的额定发电机滑移百分比(%),仅在VSContrl=0和GenModel=1时使用。设为9999.9表示不使用。SIG_SySp: 简单感应发电机的同步(零扭矩)发电机速度(转/分钟),仅在VSContrl=0和GenModel=1时使用。设为9999.9表示不使用。SIG_RtTq: 简单感应发电机的额定扭矩(牛顿·米),仅在VSContrl=0和GenModel=1时使用。设为9999.9表示不使用。SIG_PORt: 简单感应发电机的拉出比率(Tpullout/Trated),仅在VSContrl=0和GenModel=1时使用。设为9999.9表示不使用。
四,第4段
Thevenin等效感应发电机
---------------------- THEVENIN-EQUIVALENT INDUCTION GENERATOR -----------------
9999.9 TEC_Freq - Line frequency [50 or 60] (Hz) [used only when VSContrl=0 and GenModel=2]
9998 TEC_NPol - Number of poles [even integer > 0] (-) [used only when VSContrl=0 and GenModel=2]
9999.9 TEC_SRes - Stator resistance (ohms) [used only when VSContrl=0 and GenModel=2]
9999.9 TEC_RRes - Rotor resistance (ohms) [used only when VSContrl=0 and GenModel=2]
9999.9 TEC_VLL - Line-to-line RMS voltage (volts) [used only when VSContrl=0 and GenModel=2]
9999.9 TEC_SLR - Stator leakage reactance (ohms) [used only when VSContrl=0 and GenModel=2]
9999.9 TEC_RLR - Rotor leakage reactance (ohms) [used only when VSContrl=0 and GenModel=2]
9999.9 TEC_MR - Magnetizing reactance (ohms) [used only when VSContrl=0 and GenModel=2]
解释:
TEC_Freq: 电网频率(单位:赫兹),值为50或60,仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_NPol: 极对数,值为大于0的偶整数,仅在VSContrl=0且GenModel=2时使用。设为9998表示不使用。TEC_SRes: 定子电阻(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_RRes: 转子电阻(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_VLL: 线电压的RMS值(单位:伏特),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_SLR: 定子漏抗(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_RLR: 转子漏抗(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。TEC_MR: 磁化电抗(单位:欧姆),仅在VSContrl=0且GenModel=2时使用。设为9999.9表示不使用。
五,第5段
高速轴制动
---------------------- HIGH-SPEED SHAFT BRAKE ----------------------------------
0 HSSBrMode - HSS brake model {0: none, 1: simple, 3: user-defined from routine UserHSSBr, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)
9999.9 THSSBrDp - Time to initiate deployment of the HSS brake (s)
0.6 HSSBrDT - Time for HSS-brake to reach full deployment once initiated (sec) [used only when HSSBrMode=1]
28116.2 HSSBrTqF - Fully deployed HSS-brake torque (N-m)
解释:
HSSBrMode: 高速轴制动模式,设为0表示不使用制动模型。选项包括:0: 不使用制动模型1: 简单制动模型3: 自定义制动模型(来自UserHSSBr例程)4: 自定义制动模型(来自Simulink/Labview)5: 自定义制动模型(来自Bladed样式DLL)
THSSBrDp: 启动高速轴制动的时间(秒),设为9999.9表示不使用。HSSBrDT: 高速轴制动器在启动后完全展开所需的时间(秒),仅在HSSBrMode=1时使用。此处设为0.6秒。HSSBrTqF: 高速轴制动器完全展开时的制动力矩(牛顿·米),此处设为28116.2牛顿·米。
六,第6段
机舱偏航控制
---------------------- NACELLE-YAW CONTROL -------------------------------------
0 YCMode - Yaw control mode {0: none, 3: user-defined from routine UserYawCont, 4: user-defined from Simulink/Labview, 5: user-defined from Bladed-style DLL} (switch)
9999.9 TYCOn - Time to enable active yaw control (s) [unused when YCMode=0]
0 YawNeut - Neutral yaw position--yaw spring force is zero at this yaw (degrees)
9.02832E+09 YawSpr - Nacelle-yaw spring constant (N-m/rad)
1.916E+07 YawDamp - Nacelle-yaw damping constant (N-m/(rad/s))
9999.9 TYawManS - Time to start override yaw maneuver and end standard yaw control (s)
2 YawManRat - Yaw maneuver rate (in absolute value) (deg/s)
0 NacYawF - Final yaw angle for override yaw maneuvers (degrees)
解释:
YCMode: 偏航控制模式,设为0表示不使用偏航控制。选项包括:0: 不使用偏航控制3: 自定义偏航控制(来自UserYawCont例程)4: 自定义偏航控制(来自Simulink/Labview)5: 自定义偏航控制(来自Bladed样式DLL)
TYCOn: 启用主动偏航控制的时间(秒),在YCMode=0时不使用。设为9999.9表示不使用。YawNeut: 中性偏航位置,在此偏航角度下偏航弹簧力为零(度),设为0度。YawSpr: 机舱偏航弹簧常数(单位:牛顿·米/弧度),设为9.02832E+09。YawDamp: 机舱偏航阻尼常数(单位:牛顿·米/(弧度/秒)),设为1.916E+07。TYawManS: 启动覆盖偏航操作并结束标准偏航控制的时间(秒),设为9999.9表示不使用。YawManRat: 偏航操作速率(绝对值,单位:度/秒),设为2度/秒。NacYawF: 覆盖偏航操作的最终偏航角度(度),设为0度。
七,第7段
调谐质量阻尼器
---------------------- TUNED MASS DAMPER ---------------------------------------
False CompNTMD - Compute nacelle tuned mass damper {true/false} (flag)
"../5MW_Baseline/NRELOffshrBsline5MW_ServoDyn_TMD.dat" NTMDfile - Name of the file for nacelle tuned mass damper (quoted string) [unused when CompNTMD is false]
False CompTTMD - Compute tower tuned mass damper {true/false} (flag)
"../5MW_Baseline/NRELOffshrBsline5MW_ServoDyn_TMD.dat" TTMDfile - Name of the file for tower tuned mass damper (quoted string) [unused when CompTTMD is false]
解释:
CompNTMD: 计算机舱调谐质量阻尼器的标志,设为False表示不计算。选项包括true或false。NTMDfile: 机舱调谐质量阻尼器文件的名称(引用的字符串),仅在CompNTMD为true时使用。此处设为"../5MW_Baseline/NRELOffshrBsline5MW_ServoDyn_TMD.dat"。CompTTMD: 计算塔调谐质量阻尼器的标志,设为False表示不计算。选项包括true或false。TTMDfile: 塔调谐质量阻尼器文件的名称(引用的字符串),仅在CompTTMD为true时使用。此处设为"../5MW_Baseline/NRELOffshrBsline5MW_ServoDyn_TMD.dat"。
八,第八段
Bladed接口
---------------------- BLADED INTERFACE ---------------------------------------- [used only with Bladed Interface]
"../5MW_Baseline/ServoData/DISCON.dll" DLL_FileName - Name/location of the dynamic library {.dll [Windows] or .so [Linux]} in the Bladed-DLL format (-) [used only with Bladed Interface]
"DISCON.IN" DLL_InFile - Name of input file sent to the DLL (-) [used only with Bladed Interface]
"DISCON" DLL_ProcName - Name of procedure in DLL to be called (-) [case sensitive; used only with DLL Interface]
"default" DLL_DT - Communication interval for dynamic library (s) (or "default") [used only with Bladed Interface]
false DLL_Ramp - Whether a linear ramp should be used between DLL_DT time steps [introduces time shift when true] (flag) [used only with Bladed Interface]
9999.9 BPCutoff - Cutoff frequency for low-pass filter on blade pitch from DLL (Hz) [used only with Bladed Interface]
0 NacYaw_North - Reference yaw angle of the nacelle when the upwind end points due North (deg) [used only with Bladed Interface]
0 Ptch_Cntrl - Record 28: Use individual pitch control {0: collective pitch; 1: individual pitch control} (switch) [used only with Bladed Interface]
0 Ptch_SetPnt - Record 5: Below-rated pitch angle set-point (deg) [used only with Bladed Interface]
0 Ptch_Min - Record 6: Minimum pitch angle (deg) [used only with Bladed Interface]
0 Ptch_Max - Record 7: Maximum pitch angle (deg) [used only with Bladed Interface]
0 PtchRate_Min - Record 8: Minimum pitch rate (most negative value allowed) (deg/s) [used only with Bladed Interface]
0 PtchRate_Max - Record 9: Maximum pitch rate (deg/s) [used only with Bladed Interface]
0 Gain_OM - Record 16: Optimal mode gain (Nm/(rad/s)^2) [used only with Bladed Interface]
0 GenSpd_MinOM - Record 17: Minimum generator speed (rpm) [used only with Bladed Interface]
0 GenSpd_MaxOM - Record 18: Optimal mode maximum speed (rpm) [used only with Bladed Interface]
0 GenSpd_Dem - Record 19: Demanded generator speed above rated (rpm) [used only with Bladed Interface]
0 GenTrq_Dem - Record 22: Demanded generator torque above rated (Nm) [used only with Bladed Interface]
0 GenPwr_Dem - Record 13: Demanded power (W) [used only with Bladed Interface]
解释:
DLL_FileName: 动态库的名称和位置,格式为DLL(Windows)或SO(Linux)。此处设为"../5MW_Baseline/ServoData/DISCON.dll"。DLL_InFile: 发送到DLL的输入文件名称,设为"DISCON.IN"。DLL_ProcName: 调用DLL中的过程名称,大小写敏感,设为"DISCON"。DLL_DT: 动态库的通信间隔时间(秒),或设为"default"使用默认值。DLL_Ramp: 在DLL_DT时间步之间是否使用线性斜坡,当设为true时引入时间偏移,设为false。BPCutoff: DLL中对桨距低通滤波器的截止频率(赫兹),设为9999.9表示不使用。NacYaw_North: 当迎风端朝北时机舱的参考偏航角度(度),设为0。Ptch_Cntrl: 使用单独桨距控制(0:集体桨距;1:单独桨距控制),设为0。Ptch_SetPnt: 额定以下桨距角设定值(度),设为0。Ptch_Min: 最小桨距角(度),设为0。Ptch_Max: 最大桨距角(度),设为0。PtchRate_Min: 最小桨距速率(允许的最小值,负值)(度/秒),设为0。PtchRate_Max: 最大桨距速率(度/秒),设为0。Gain_OM: 最佳模式增益(牛·米/(弧度/秒)^2),设为0。GenSpd_MinOM: 最小发电机速度(转/分钟),设为0。GenSpd_MaxOM: 最佳模式最大速度(转/分钟),设为0。GenSpd_Dem: 超过额定的发电机需求速度(转/分钟),设为0。GenTrq_Dem: 超过额定的发电机需求扭矩(牛·米),设为0。GenPwr_Dem: 需求功率(瓦特),设为0。
九,第九段
Bladed接口扭矩-速度查找表
---------------------- BLADED INTERFACE TORQUE-SPEED LOOK-UP TABLE -------------
0 DLL_NumTrq - Record 26: No. of points in torque-speed look-up table {0 = none and use the optimal mode parameters; nonzero = ignore the optimal mode PARAMETERS by setting Record 16 to 0.0} (-) [used only with Bladed Interface]
GenSpd_TLU GenTrq_TLU
(rpm) (Nm)
解释:
DLL_NumTrq: 扭矩-速度查找表中的点数,设为0表示不使用查找表并使用最佳模式参数。非零值表示忽略最佳模式参数并将Record 16设为0.0。
输出
---------------------- OUTPUT --------------------------------------------------
True SumPrint - Print summary data to <RootName>.sum (flag) (currently unused)
1 OutFile - Switch to determine where output will be placed: {1: in module output file only; 2: in glue code output file only; 3: both} (currently unused)
True TabDelim - Use tab delimiters in text tabular output file? (flag) (currently unused)
"ES10.3E2" OutFmt - Format used for text tabular output (except time). Resulting field should be 10 characters. (quoted string) (currently unused)
0 TStart - Time to begin tabular output (s) (currently unused)
OutList - The next line(s) contains a list of output parameters. See OutListParameters.xlsx for a listing of available output channels, (-)
"GenPwr" - Electrical generator power and torque
"GenTq" - Electrical generator power and torque
END of input file (the word "END" must appear in the first 3 columns of this last OutList line)
---------------------------------------------------------------------------------------
解释:
SumPrint: 是否将摘要数据打印到<RootName>.sum文件,设为True表示打印(当前未使用)。OutFile: 确定输出将放置的位置:1: 仅在模块输出文件中2: 仅在胶合代码输出文件中3: 两者都有
目前设为1(当前未使用)。
TabDelim: 在文本表格输出文件中使用制表符分隔,设为True表示使用(当前未使用)。OutFmt: 用于文本表格输出的格式(除了时间)。结果字段应为10个字符的长度。设为"ES10.3E2"(当前未使用)。TStart: 开始表格输出的时间(秒),设为0(当前未使用)。OutList: 列表中包含输出参数。可用输出通道的列表请参见OutListParameters.xlsx。"GenPwr": 电力发电机的功率和扭矩"GenTq": 电力发电机的功率和扭矩
END: 输入文件的结束标记,必须出现在最后一行的前3列。
总结
这个文件定义了NREL 5MW风力发电机在OpenFAST仿真中使用的各种控制参数和输出设置,包括变桨控制、发电机和扭矩控制、偏航控制以及Bladed接口的配置。通过这些配置,可以调整风力发电机的仿真行为和输出结果,以便更好地理解和优化其性能。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









