






matlab和carsim联合仿真,基于三自由度车辆模型,搭建ekf或者ukf与积分法融合的用于测量质心侧偏角,纵向速度,横摆角速度。
YID:59158674884123737
savel
Matlab与CarSim联合仿真:三自由度车辆模型与高级融合算法实践
在汽车动力学研究中,精确测量车辆质心侧偏角、纵向速度以及横摆角速度等关键参数至关重要。本文将探讨如何利用Matlab和CarSim联合仿真平台,基于三自由度车辆模型,搭建扩展卡尔曼滤波器(EKF)或非线性卡尔曼滤波器(UKF)与积分法融合的算法,以实现对这些参数的高精度测量。
一、联合仿真背景及模型选择
在现代汽车开发过程中,CarSim作为一款车辆动力学仿真,被广泛应用于车辆性能的预测和评估。而Matlab则以其强大的数据处理和算法开发能力,为研究者提供了广阔的发挥空间。本文选择三自由度车辆模型作为研究基础,该模型能够较好地反映车辆的纵向、横向以及横摆运动。
二、EKF/UKF算法原理及实现
EKF和UKF都是用于状态估计的递归算法,它们能够根据的动力学模型和观测数据,对车辆状态进行实时估计。在本文中,我们将EKF或UKF应用于车辆质心侧偏角、纵向速度以及横摆角速度的测量。算法通过不断更新状态和协方差矩阵,实现对车辆状态的准确估计。
在Matlab中,我们可以编写相应的M文件来实现EKF或UKF算法。具体实现过程包括定义状态、输入噪声、观测噪声等参数,建立动力学模型和观测模型,然后通过迭代计算更新状态和协方差矩阵。
三、积分法融合策略
除了EKF/UKF算法外,我们还将采用积分法对车辆状态进行测量。积分法通过对传感器数据进行积分运算,得到车辆状态的估计值。为了实现与EKF/UKF算法的融合,我们将采用加权融合策略,根据不同算法的估计精度和可靠性,对估计结果进行加权平均,以得到更准确的车辆状态估计值。
四、联合仿真实验及结果分析
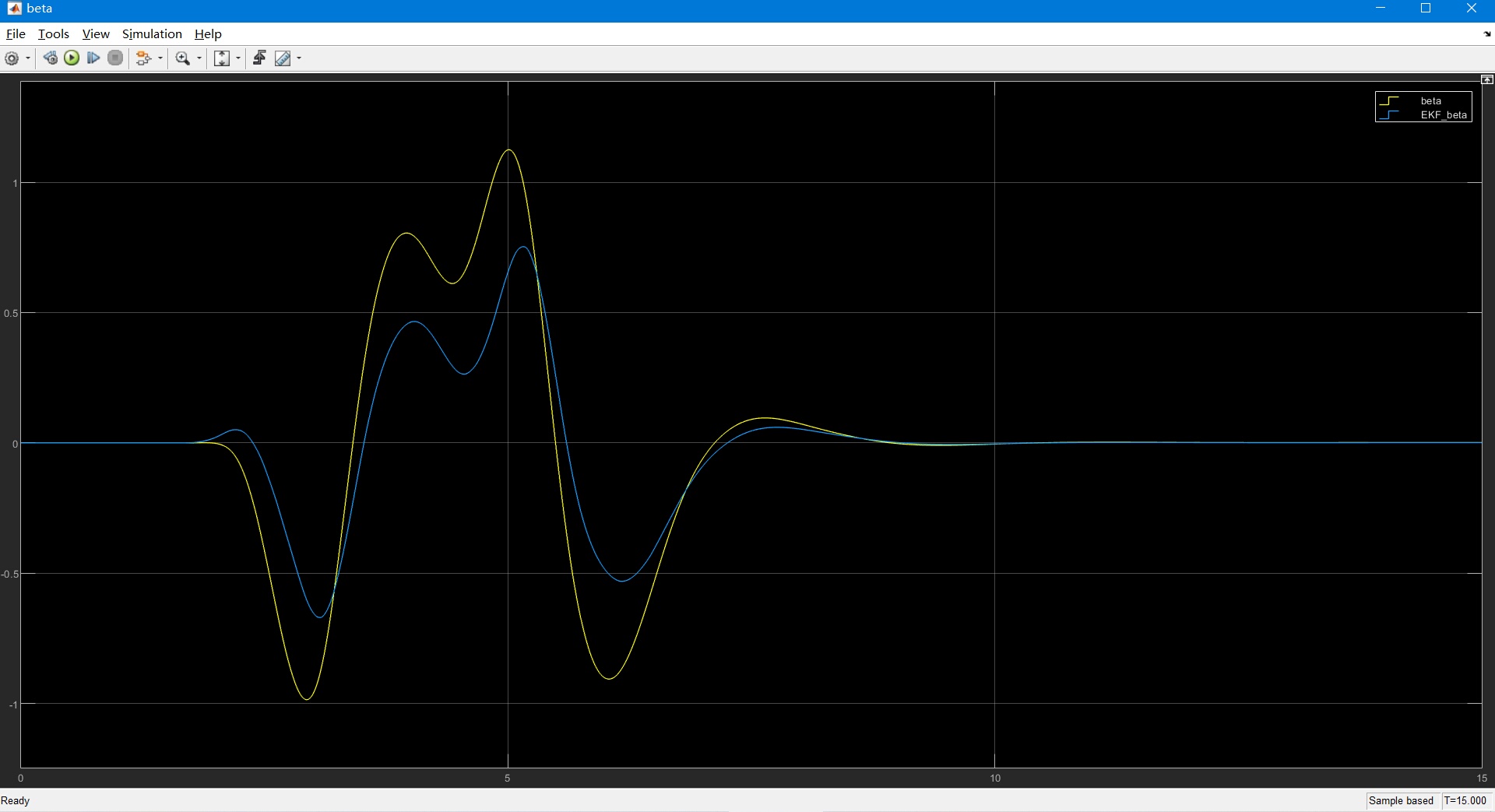
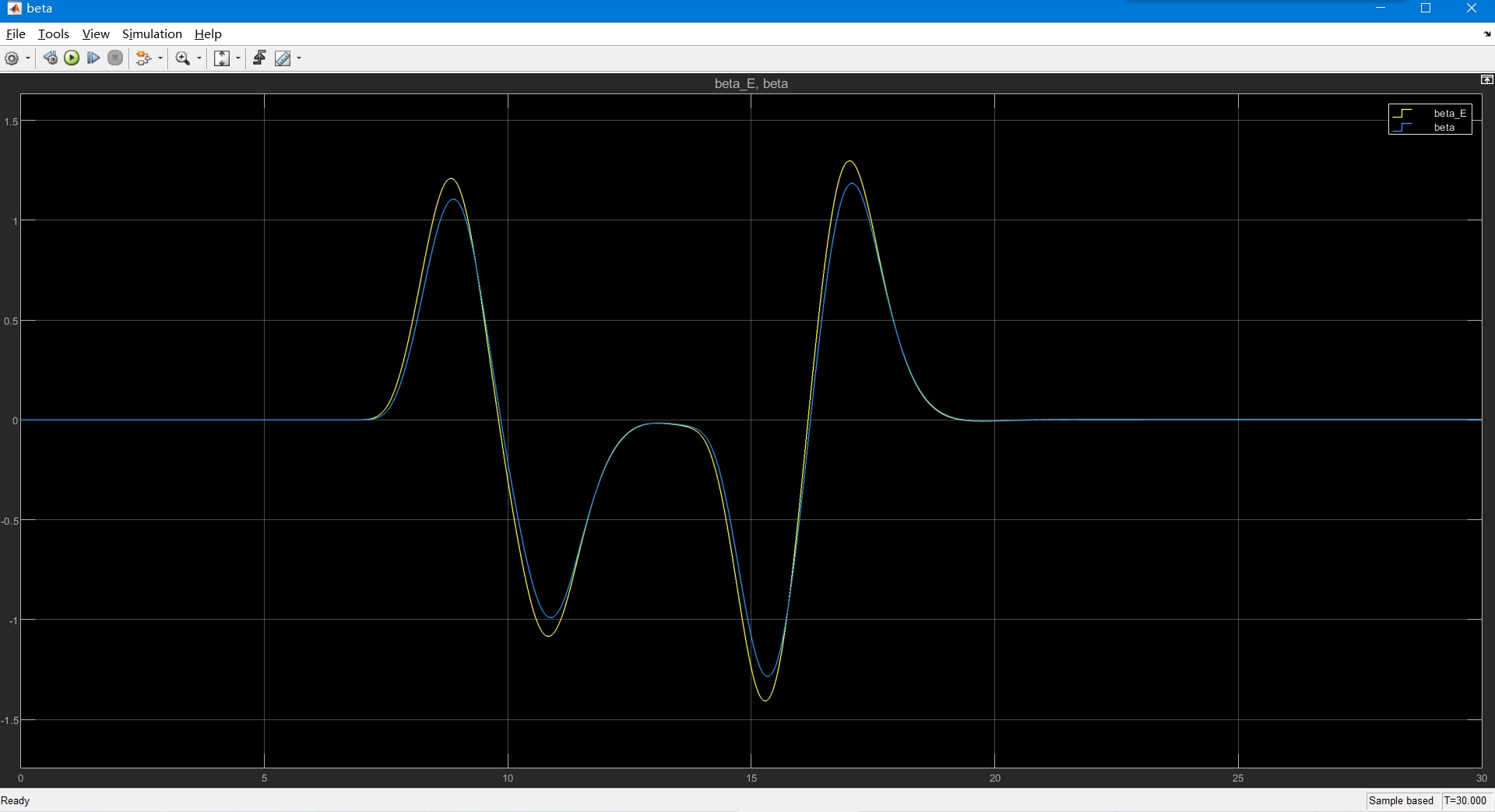
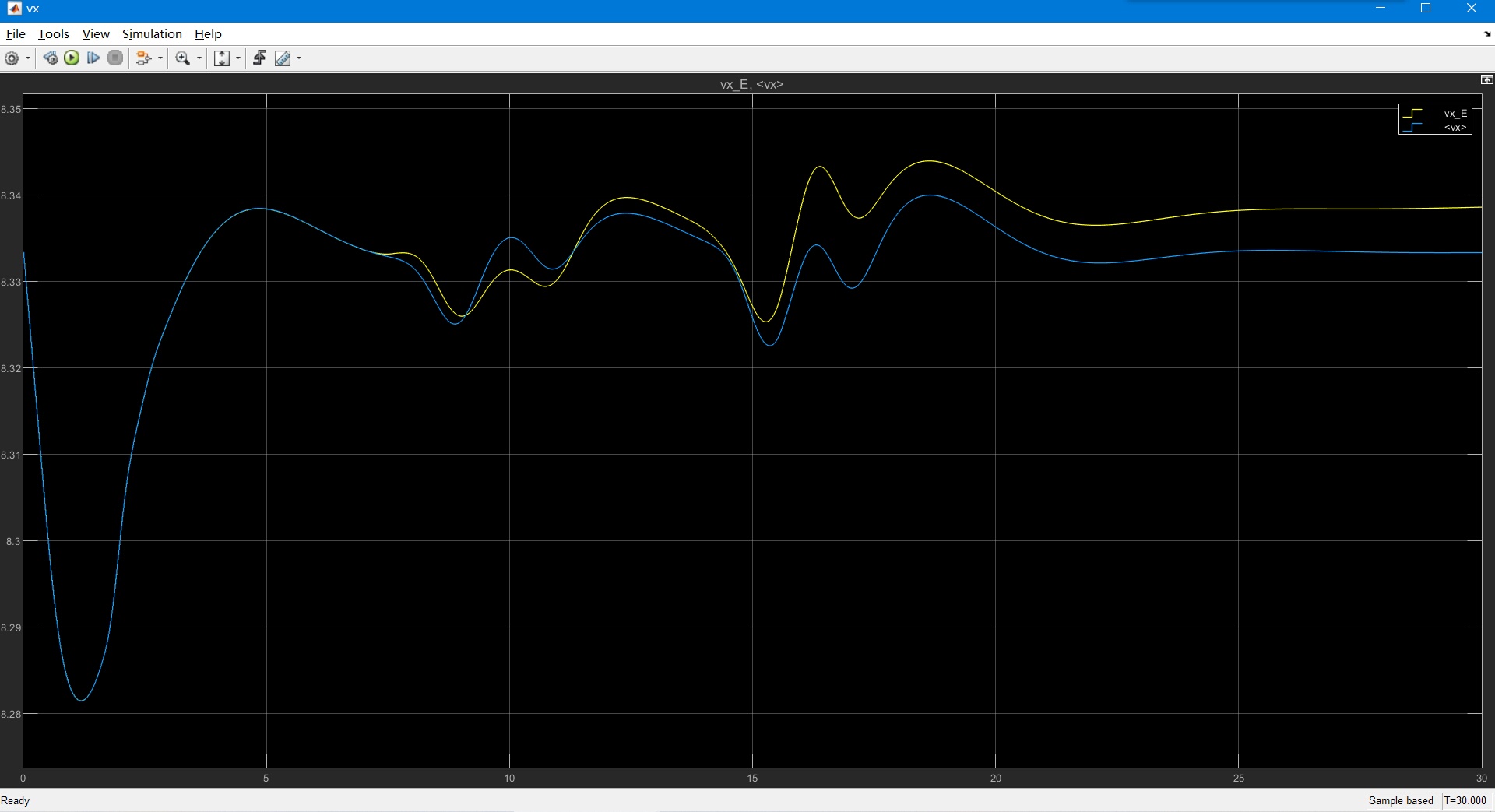
在CarSim和Matlab的联合仿真环境中,我们搭建了基于三自由度车辆模型的仿真场景。通过输入道路信息和车辆控制指令,仿真可以生成车辆的各种运动状态数据。然后,我们将EKF/UKF算法和积分法进行融合,对质心侧偏角、纵向速度以及横摆角速度等关键参数进行测量。通过对比仿真结果与实际测量结果,我们可以评估算法的准确性和可靠性。
五、示例代码及讨论
以下是Matlab中实现EKF算法的部分代码示例:
function [estimate_state] = ekf_update(measurement, previous_state, system_model)
% 测量更新过程
% ... (省略具体实现代码)
% 根据模型和测量数据进行状态更新计算
% ... (省略具体实现代码)
estimate_state = updated_state; % 返回更新后的状态估计值
end
通过不断调整算法参数和融合策略,我们可以实现对车辆状态的更精确测量。在实际应用中,我们还需要考虑传感器噪声、模型误差等因素对算法性能的影响,并进行相应的优化和调整。
六、结语
本文介绍了如何利用Matlab和CarSim联合仿真平台,基于三自由度车辆模型,搭建EKF或UKF与积分法融合的算法,以实现对车辆质心侧偏角、纵向速度以及横摆角速度等关键参数的高精度测量。通过联合仿真实验和结果分析,我们可以评估算法的准确性和可靠性,为汽车开发提供有力的技术支持。未来,我们还将继续探索更先进的算法和技术,以进一步提高车辆动力学控制的精度和效率。
揭秘真相揭秘: matlab和carsim联合仿真,基于三自由度车辆模型,搭建ekf或者ukf与积分法融合的用于测量质心侧偏
















 325
325

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









