






AUV 增量PID轨迹跟踪
水下机器人无人船无人艇 USV路径跟随
MATLAB仿真
YID:4150766379157023
xixixxi
AUV(Autonomous Underwater Vehicle)是一种水下机器人,它具备自主导航和执行任务的能力。在水下作业中,AUV需要根据给定的轨迹来进行路径跟踪,以完成任务要求。而针对AUV路径跟踪问题,增量PID(Proportional-Integral-Derivative)控制算法被广泛应用。
在AUV路径跟踪中,增量PID控制算法是一种经典的控制方法。该算法通过不断调整控制量的增量来实现对AUV运动的精确控制。相比于传统PID控制算法,增量PID控制算法具有较好的动态性能和稳定性。
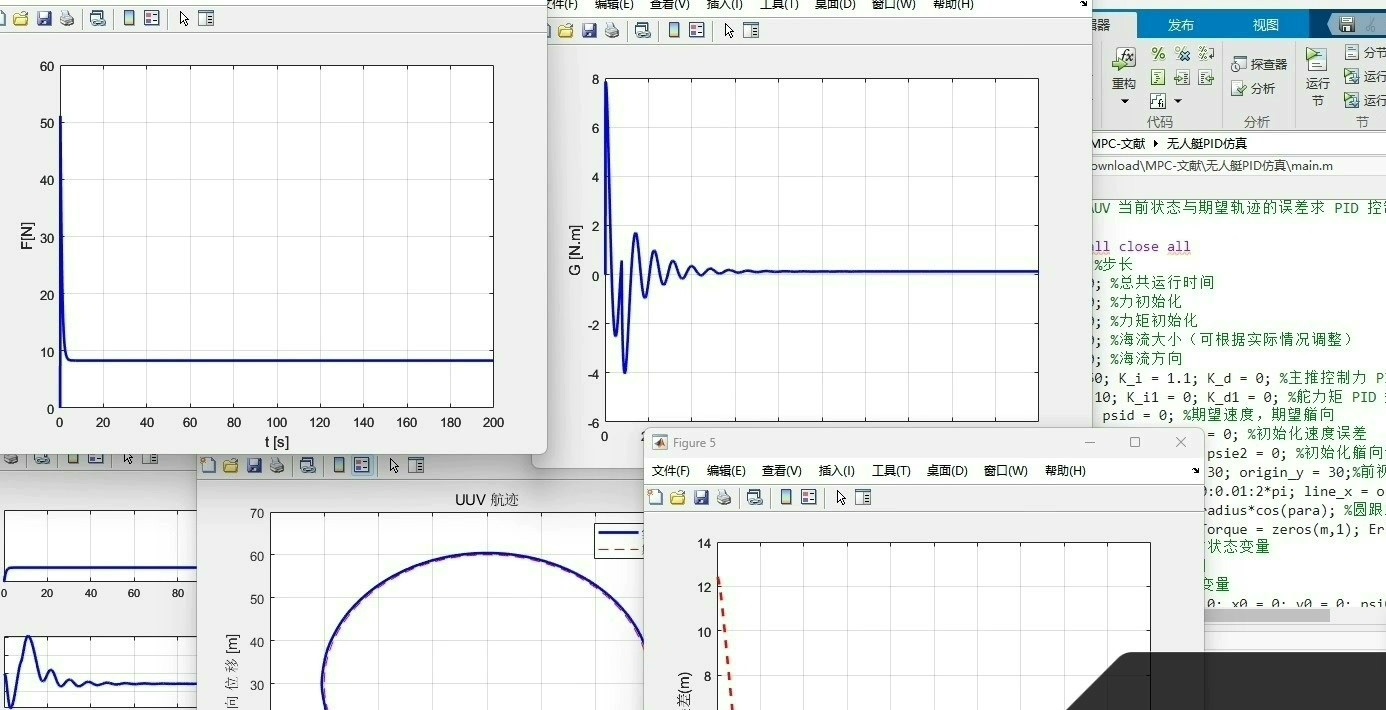
在实际应用中,针对AUV路径跟踪问题,常常需要进行MATLAB仿真。MATLAB是一种基于数值计算和可视化的高级编程语言,广泛用于科学计算和工程设计。通过在MATLAB中进行仿真实验,可以快速验证增量PID控制算法在AUV路径跟踪中的性能和有效性。
在进行AUV路径跟踪的MATLAB仿真中,可以通过建立AUV的数学模型,以及设定目标轨迹,来模拟AUV在不同情况下的动态响应。通过调整增量PID控制算法中的控制参数,可以对AUV的路径跟踪性能进行优化,提高其跟随目标轨迹的准确性和稳定性。
除了MATLAB仿真,针对AUV路径跟踪问题,还可以进行实际硬件实验。通过在水下环境中搭建实际AUV平台,并结合传感器技术和导航算法,可以验证增量PID控制算法在实际场景下的可行性和效果。实际硬件实验不仅能够更加真实地反映AUV的运动特性,还能够发现和解决一些仿真中无法预料的问题。
综上所述,AUV的增量PID轨迹跟踪是一项具有挑战性的技术问题。通过MATLAB仿真和实际硬件实验相结合的方法,可以有效地解决AUV路径跟踪中的控制算法设计和参数调整问题。这种方法不仅具有较高的可行性和效果,还为AUV的自主导航和执行任务提供了坚实的技术支持。
以上相关代码,程序地址:http://matup.cn/766379157023.html















 622
622











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









