






AUV 增量PID轨迹跟踪 MATLAB仿真
水下机器人控制 无人船无人艇 USV路径跟随
标题:水下机器人的增量PID轨迹跟踪及MATLAB仿真
摘要:本文将重点研究水下机器人控制中的增量PID轨迹跟踪问题,并借助MATLAB进行仿真分析。首先介绍了水下机器人控制的背景和挑战,然后详细阐述了增量PID控制算法的原理和应用,接着提出了一种基于增量PID的轨迹跟踪方案,并通过MATLAB仿真验证了该方案的有效性。最后,总结了本文的研究结果,指出了未来进一步改进和扩展的方向。
1. 引言
水下机器人作为现代海洋科学研究和资源开发的重要工具,在无人船和无人艇领域发挥着关键作用。然而,在水下机器人控制中,有效的轨迹跟踪仍然是一个具有挑战性的问题。本节介绍了水下机器人控制中的路径跟随问题,并提出了本文的研究目标和主要内容。
2. 水下机器人控制的背景和挑战
水下机器人控制面临着复杂的水下环境、运动约束和传感器不确定性等挑战。本节详细介绍了水下机器人控制的背景和挑战,包括水下环境特点、动力学模型和传感器限制。通过深入分析这些挑战,为后续章节的研究提供了必要的背景知识。
3. 增量PID控制算法的原理和应用
PID控制算法是一种经典的控制算法,具有简单、易实现和广泛适用等特点。本节详细介绍了增量PID控制算法的原理和应用,包括PID控制的基本原理、增量PID控制算法的改进及其在水下机器人控制中的应用。通过对PID控制算法的深入理解,为下一节的轨迹跟踪方案提供了理论基础。
4. 基于增量PID的轨迹跟踪方案
本节提出了一种基于增量PID的轨迹跟踪方案,该方案将传统的PID控制算法与路径规划算法相结合,实现了水下机器人对给定轨迹的精确跟踪。具体包括增量PID算法的参数选择、轨迹规划和跟踪误差计算等关键步骤。通过建立水下机器人的运动模型和路径规划算法,实现了增量PID控制器的设计和优化。
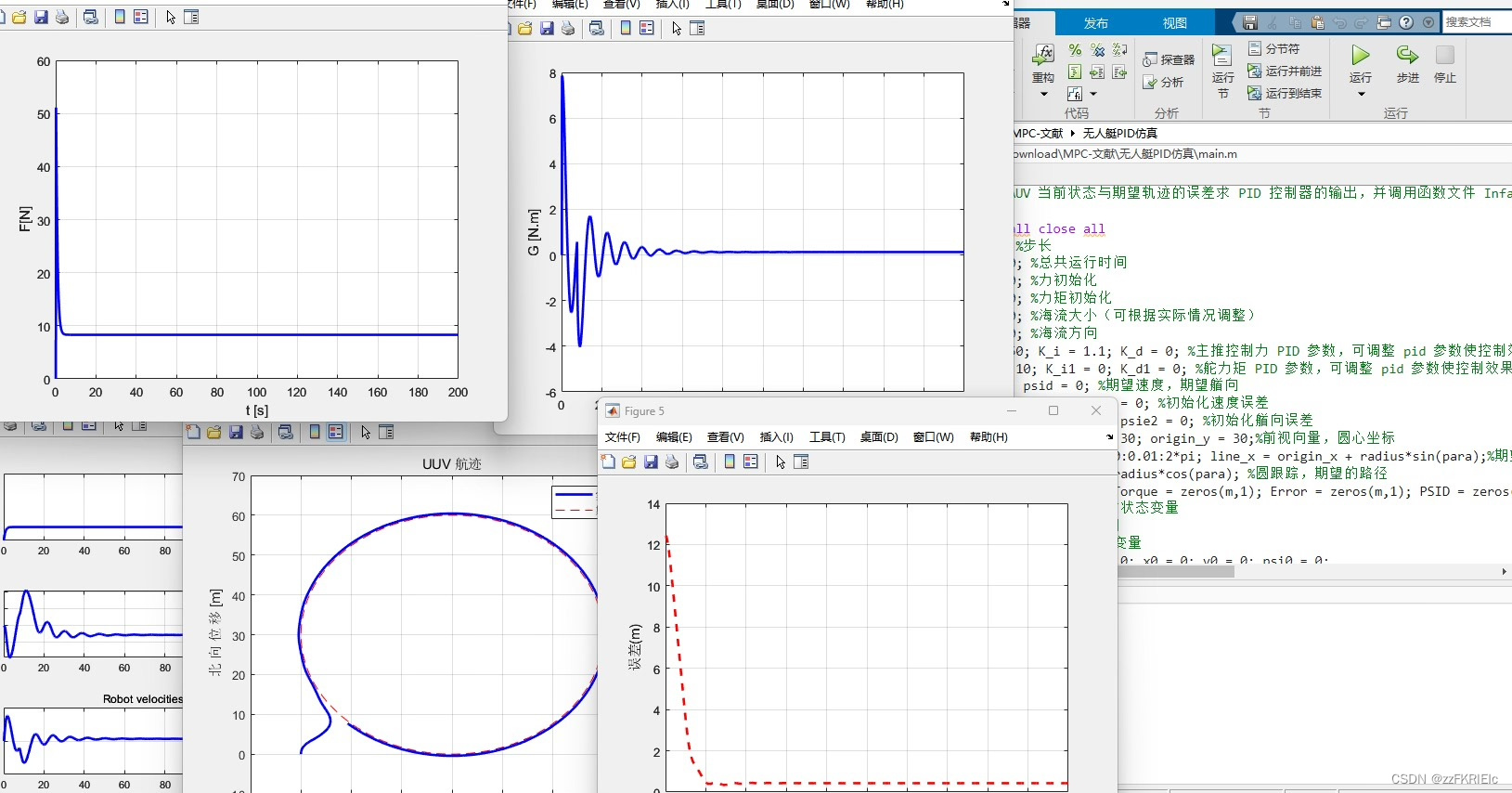
5. 基于MATLAB的仿真验证
本节借助MATLAB软件,对所提出的基于增量PID的轨迹跟踪方案进行了仿真验证。首先介绍了仿真实验的设置和参数选择,然后展示了仿真结果和分析。通过仿真验证,验证了所提出的方案在不同情况下的有效性和鲁棒性,为进一步的实验研究提供了参考。
6. 结果与讨论
本节总结了本文的研究结果,分析了实验数据和仿真结果,并进行了讨论。通过对实验结果和仿真分析的综合评估,证明了所提出的基于增量PID的轨迹跟踪方案在水下机器人控制中的应用潜力,并指出了改进和扩展的方向。
7. 结论
本文针对水下机器人控制中的增量PID轨迹跟踪问题,提出了一种基于增量PID的轨迹跟踪方案,并借助MATLAB进行了仿真验证。研究结果表明,所提出的方案能有效提高水下机器人对给定轨迹的跟踪准确性和鲁棒性。然而,本文的研究仅限于仿真环境,需要进一步的实验验证和优化。未来的研究可以进一步探索其他控制算法和路径规划方法,并考虑更复杂的水下环境和实际工程应用。
关键词:水下机器人控制,增量PID,轨迹跟踪,MATLAB仿真
相关代码,程序地址:http://imgcs.cn/lanzoun/715103705633.html















 818
818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









