







基于YOLOv8的小麦穗检测技术研究(Wheat Head Detection Using YOLOv8)
1. 引言
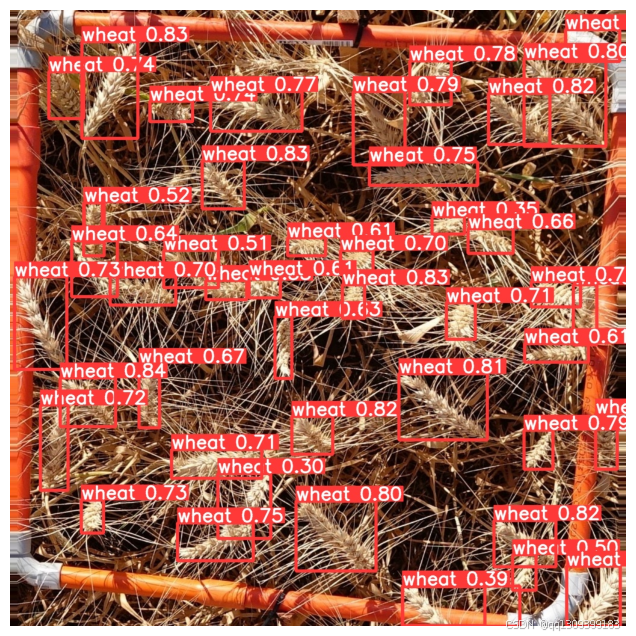
小麦穗检测(Wheat Head Detection)是农业智能化管理中的关键任务,对产量预测、病害监测和精准农业具有重要意义。传统的人工检测方法效率低、成本高,而基于深度学习的目标检测技术(如YOLOv8)能够实现高效、自动化的麦穗识别与计数。YOLOv8作为YOLO系列的最新版本之一,在检测精度和速度上均有显著提升,特别适合农业场景下的实时检测需求。
2. YOLOv8 技术概述
YOLOv8(You Only Look Once version 8)由Ultralytics团队开发,继承了YOLO系列的单阶段检测(Single-Stage Detection)架构,并进行了多项优化:
2.1 YOLOv8 的核心改进
- 更高效的Backbone网络:采用CSPDarknet53改进版,增强特征提取能力。
- 自适应训练策略:如动态学习率调整、Mosaic数据增强等,提高模型泛化能力。
- Anchor-Free检测机制:相比YOLOv5的Anchor-Based方法,YOLOv8采用无锚点(Anchor-Free)检测,减少超参数调整难度。
- 更优的损失函数:采用CIoU(Complete-IoU)损失,提高边界框回归精度。
2.2 YOLOv8 在农业检测中的优势
- 高精度:适用于复杂农田环境(如麦穗密集、遮挡等情况)。
- 实时性:可在边缘设备(如无人机、嵌入式系统)上部署,满足田间实时检测需求。
- 轻量化:提供不同规模模型(YOLOv8n, YOLOv8s, YOLOv8m, YOLOv8l, YOLOv8x),适应不同计算资源限制。
3. 小麦穗检测的技术实现
3.1 数据准备
- 数据集来源:常用数据集包括:
- Global Wheat Head Dataset (GWHD):包含全球多个地区的小麦穗标注数据。
- 自定义数据集:通过无人机或地面摄像头采集田间图像,并进行标注(使用LabelImg或CVAT等工具)。
- 数据增强:采用旋转、缩放、色彩调整、随机裁剪等方法,提高模型鲁棒性。
3.2 模型训练
- 预训练模型选择:基于YOLOv8s(平衡速度与精度)或YOLOv8m(更高精度)。
- 训练参数优化:
- 输入分辨率:640×640(兼顾检测精度和计算效率)。
- Batch Size:根据GPU显存调整(通常8~32)。
- 学习率调度:采用Cosine Annealing策略,避免过拟合。
- 迁移学习:在预训练权重(如COCO数据集)基础上微调,加速收敛。
3.3 模型评估
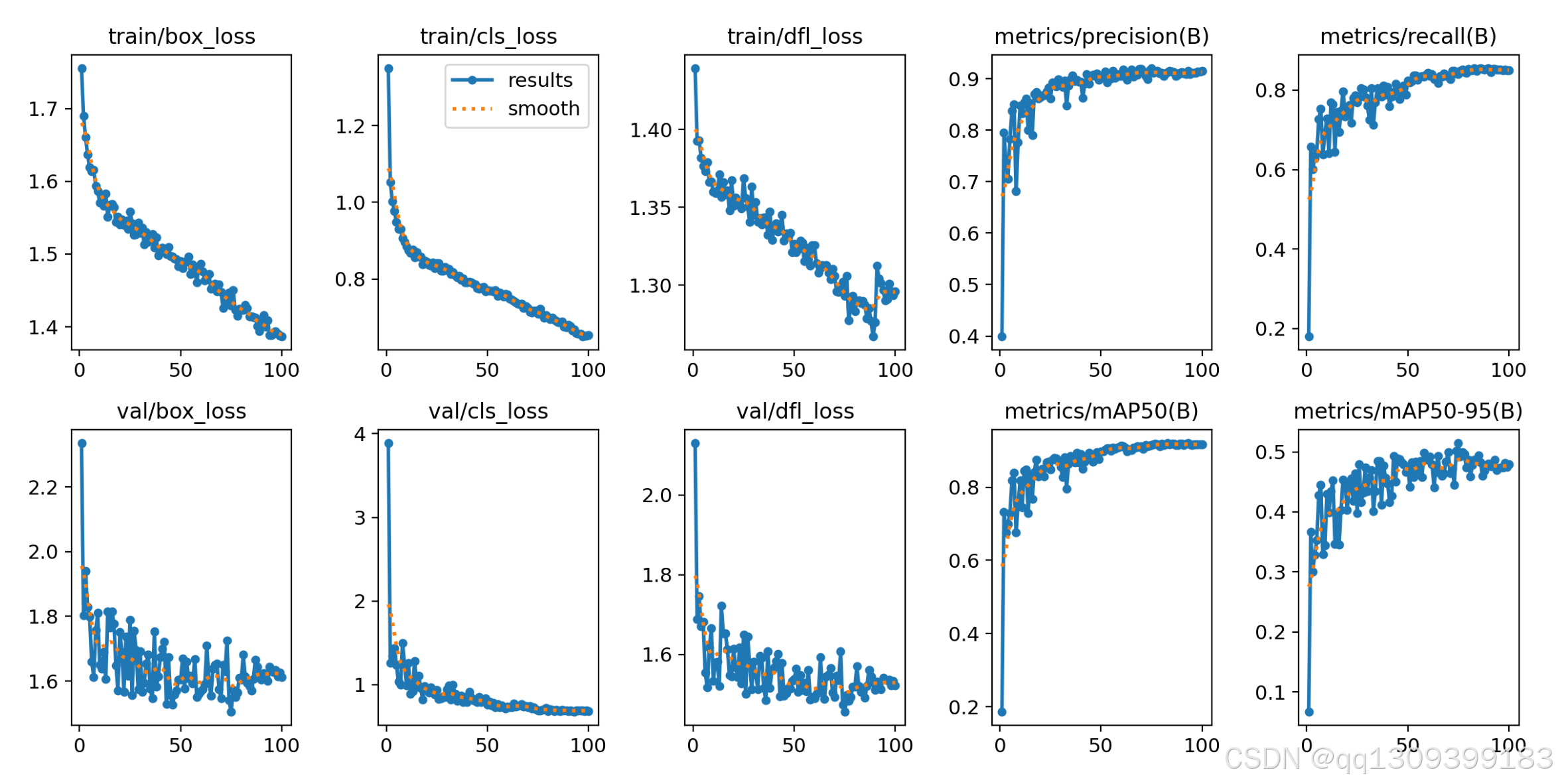
- 关键指标:
- mAP@0.5(Mean Average Precision,IoU=0.5时的平均精度)。
- F1-Score(平衡精确率Precision和召回率Recall)。
- 推理速度(FPS):决定是否适合实时应用。
- 可视化分析:使用Grad-CAM等方法观察模型关注区域,优化检测效果。
4. 技术挑战与解决方案
4.1 密集麦穗检测
- 问题:麦穗密集时易发生漏检或误检。
- 解决方案:
- 采用更高分辨率输入(如1280×1280)。
- 使用注意力机制(如CBAM)增强特征提取。
4.2 复杂背景干扰
- 问题:麦田中的杂草、阴影等干扰检测。
- 解决方案:
- 结合多光谱图像(如近红外波段)增强麦穗特征。
- 采用数据增强模拟不同光照条件。
4.3 边缘设备部署
- 问题:农田设备(如无人机)计算资源有限。
- 解决方案:
- 使用YOLOv8n(轻量版)或TensorRT加速。
- 模型量化(FP16/INT8)减少计算量。
5. 应用场景
- 产量预测:通过麦穗计数估算小麦产量。
- 病害监测:检测异常麦穗(如锈病、赤霉病)。
- 精准农业:结合无人机或智能农机,实现变量施肥/喷药。
- 育种研究:分析不同品种的麦穗形态特征。
6. 未来发展方向
- 多模态融合:结合RGB+热成像+LiDAR数据提高检测鲁棒性。
- 3D检测:使用立体视觉或深度相机实现麦穗三维定位。
- 自监督学习:减少标注数据依赖,适应不同小麦品种。
- 边缘AI:优化模型以适应更低功耗设备(如农业机器人)。
7. 结论
基于YOLOv8的小麦穗检测技术能够高效、精准地实现田间麦穗识别,为智慧农业提供关键技术支持。未来,随着模型轻量化、多模态数据融合等技术的发展,该技术将在精准农业、自动化监测等领域发挥更大作用。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









