







一 简介
二维和三维空间线段求交参数方程推导,最终可得到一个能够统一表达的表达式。
二 算法推导
2.1 2D线段求交
(1)判断两条线段是否存在交点
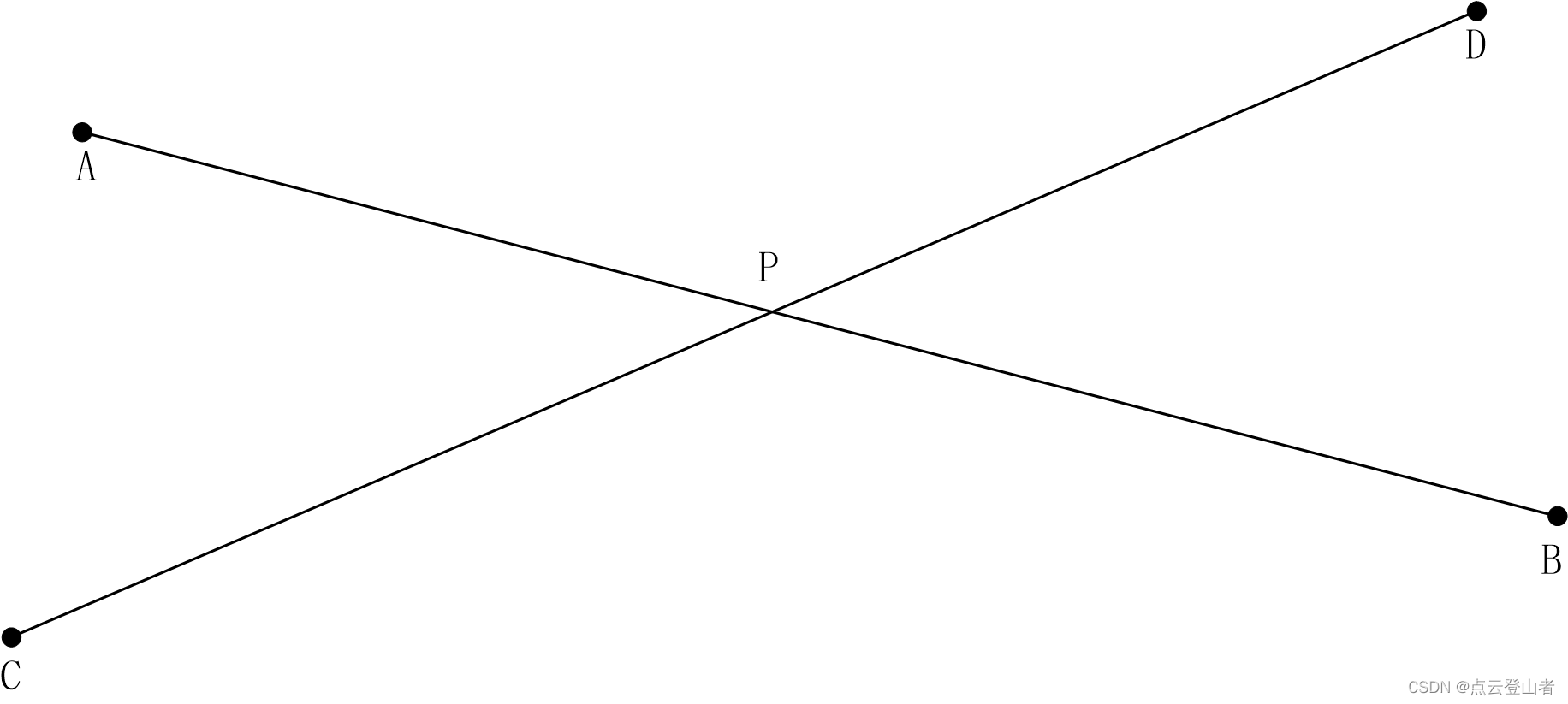
如上图所示,线段AB和线段CD若相交,则点A和点B分别位于线段CD两侧,且点C和点D分别位于线段AB两侧。
而判断两个点是否位于线段的两侧可通过线段的叉积来判断。
满足(AB x CA)*(AB x DA)<0 && (CD x AC)*(CD x BC)<0,则线段AB和CD存在交点,否则,不相交。
由于二维向量无法进行叉积,则每个向量的Z值均设置为0。
(2)参数方程求解
建立方程组:
P = A + AB*t
P = C + CD*u
二者联立为:
A + AB*t = C + CD*u
->AB*t = (C-A) + CD*u
此时,如果要你解算t,则需要消去u。因此,两边同时叉乘CD(相同向量叉乘等于0)
t*(AB x CD) = (CA x CD)
在此处有两种解法:
①:根据共线向量相除可转换为向量模相除
t = (CA x CD)/(AB x CD)
->t = ||(CA x CD)||/||(AB x CD)||
由于三角形面积等于相邻两向量的叉积的模的1/2,有人又可以理解为:
t = S▲ACP/abs(S▲ADP - S▲CPB)
②:继续使用向量运算求解
t*(AB x CD) = (CA x CD)
->t*((AB x CD)*(AB x CD)) = (CA x CD)*(AB x CD)
->t = (CA x CD)*(AB x CD)/||AB x CD||^2
最后,将t代入
P = A + AB*t得到交点P的坐标。
2.2 3D线段求交
(1)空间线段共面判断
由于空间中的线段存在异面,因此,通过计算三点所在平面法向量是否共线进行判断:
若(AB x AC) // (AB x AD),则两条线段共面。
(2)是否相交
首先,我们转换为直线求交,通过判断AB是否与CD平行进行确定,若不平行,则必定存在相交;
(3)参数方程求解
同2D线段参数求解一样:
t = (CA x CD)*(AB x CD)/||AB x CD||^2
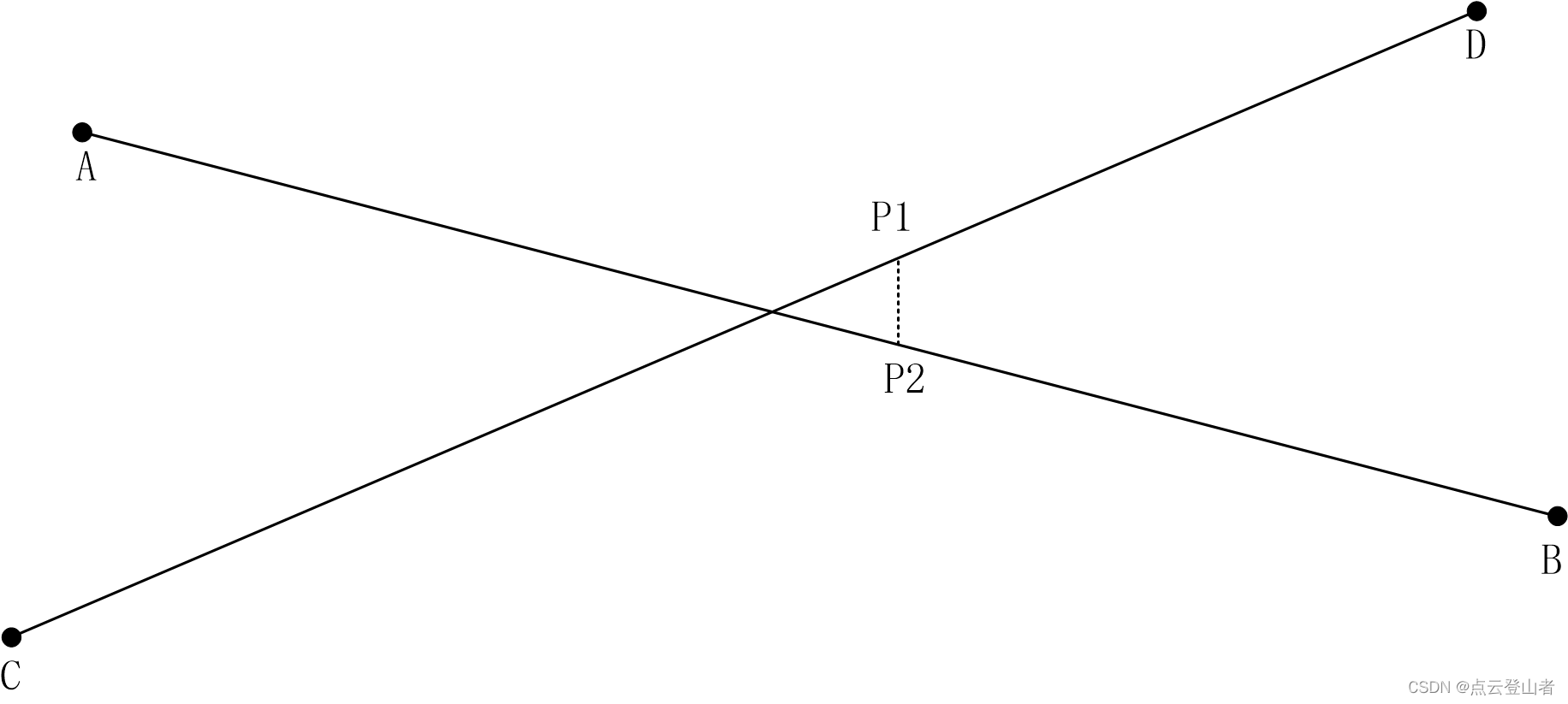
但在空间上,由于浮点型数据的存在,空间直线交点会存在浮点误差,并不完全相交。
因此,可转换为计算两直线的公垂线,求得两直线的最近点对P1和P2,也即垂足。
这样,依然可使用上述参数方程求解:
t = (CA x CD)*(AB x CD)/||AB x CD||^2
从该参数表达式可观察到,
若AB与CD平行,则AB x CD等于0,则分母为0;
若要求P1和P2,则分别计算得到t和u,通过判断
||P1P2||≤eps进行判断二者是否相交,并可用P1P2的中点作为最终的交点结果。
刚刚之前将空间线段求交转换为了空间直线求交,若是空间线段,则t和u的取值均为(0,1)。
2.3 2-3D线段求交
最终可以总结得到:2D和3D线段求交均可通过一个参数表达式进行求解,仅仅需要将二维向量的Z值修改为0即可。
三 代码展示
空间直线求交代码:
//计算空间直线之间的公垂线垂足
//基于Eigen开发
/*
输入:line_a、line_b,均为6维向量,前三维表示直线上一点的坐标,后三维表示直线的方向向量
输出:pt1_seg、pt2_seg,最小公垂线的两个垂足,4维向量,前三维表示空间坐标,第四维是零
*/
void lineToLineSegment(const Eigen::VectorXd &line_a, const Eigen::VectorXd &line_b,
Eigen::Vector4d &pt1_seg, Eigen::Vector4d &pt2_seg)
{
// point + direction = 2nd point
Eigen::Vector4d p1 = Eigen::Vector4d::Zero();
Eigen::Vector4d p2 = Eigen::Vector4d::Zero();
Eigen::Vector4d dir1 = Eigen::Vector4d::Zero();
p1.head<3>() = line_a.head<3>(); //直线上点的坐标
dir1.head<3>() = line_a.segment<3>(3); //方向向量
p2 = p1 + dir1; //直线上一点加上直线方向向量,等于直线上另外一点;直线上两个点的差等于方向向量
// point + direction = 2nd point
Eigen::Vector4d q1 = Eigen::Vector4d::Zero();
Eigen::Vector4d q2 = Eigen::Vector4d::Zero();
Eigen::Vector4d dir2 = Eigen::Vector4d::Zero();
q1.head<3>() = line_b.head<3>();
dir2.head<3>() = line_b.segment<3>(3);
q2 = q1 + dir2;
// a = x2 - x1 = line_a[1] - line_a[0]
Eigen::Vector4d u = dir1;
// b = x4 - x3 = line_b[1] - line_b[0]
Eigen::Vector4d v = dir2;
// c = x2 - x3 = line_a[1] - line_b[0]
Eigen::Vector4d w = p2 - q1;
double a = u.dot(u);
double b = u.dot(v);
double c = v.dot(v);
double d = u.dot(w);
double e = v.dot(w);
double denominator = a*c - b*b;
double sc, tc;
// Compute the line parameters of the two closest points
if (denominator < 1e-5) // The lines are almost parallel
{
sc = 0.0;
tc = (b > c ? d / b : e / c); // Use the largest denominator
}
else
{
sc = (b*e - c*d) / denominator;
tc = (a*e - b*d) / denominator;
}
// Get the closest points
pt1_seg = Eigen::Vector4d::Zero();
pt1_seg = p2 + sc * u;
pt2_seg = Eigen::Vector4d::Zero();
pt2_seg = q1 + tc * v;
}

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











