







摘要
激光扫描系统获取的激光点云反射强度信息多为未经改正的强度信息,受各种因素的影响,无法完全准确地表征目标表面材质特性,制约了后续的道路标线点云分割。因此,研究如何消除各种因素的影响,增强点云强度,已成为应用点云强度数据的首要任务。在这当中,点云强度校正是研究比较多的一个课题。
如通过直接基于各类影响因素,如扫描环境中的温度和湿度,传感器输出能量,以及扫描距离和激光入射角等几何因素进行模型建立和分析,实现点云强度校正。Höfle和Pfeifer在2007年系统地研究了激光点云强度校正,将校正方法分为数据驱动和模型驱动两类。模型驱动方法以激光雷达公式为基础,根据激光在大气传输过程中的衰减变化以及目标表面特性,采用相应或相近的关系模型进行强度校正;数据驱动方法主要通过选取适当的同质数据,拟合激光强度与各类影响因素之间的关系,从而完成强度校正。如车载激光点云的强度校正主要基于数据驱动,不考虑激光扫描的物理背景,通过拟合强度与各个影响因子之间关系建立模型,实现强度数据的改正。Teo等人采用数据驱动方法,基于距离-强度关系,通过对比实验选择三次多项式构建校正模型,依据参考距离,利用比值法实现距离的相对校正,从而消除距离对强度的衰减影响。Cheng等人则基于入射角-强度关系,提取车载激光扫描系统自带的激光扫描角绝对值作为激光入射角,构建线性模型拟合二者关系,以模型值作为校正结果,从而去除激光入射角对点云强度值的削弱现象。
接下来,主要针对基于距离的强度校正方法进行叙述:
算法原理
(1)关系模型确定
根据激光反射特性,在一定扫描范围中,车载激光点云的反射强度信息随着扫描距离的增加而出现衰减,反射强度值与距离呈反比例关系。但是,在近距离处,对于高反射率目标会出现过饱和现象,表现出“近距离效应”,强度与距离并不呈现反比例关系;在远离激光扫描仪的边缘处,存在部分低反射率目标回波信号难以被激光扫描仪正常接收的情况,激光强度同样不与距离平方呈反比关系。因此,依据逼近定理,采用三次多项式函数构建距离-强度关系模型。
![]()
式中![]() 为三次多项式函数的参数,利用人工提取仅包含地面点云的同质数据(homogeneous reflecting surface data),即受磨损程度相似的具有相同反射属性的同材质对象点云,并采用最小二乘算法进行参数估计。R为对应点到激光扫描中心的距离,若获取的点云不包含该信息,则需要利用轨迹数据计算点云扫描距离数据。
为三次多项式函数的参数,利用人工提取仅包含地面点云的同质数据(homogeneous reflecting surface data),即受磨损程度相似的具有相同反射属性的同材质对象点云,并采用最小二乘算法进行参数估计。R为对应点到激光扫描中心的距离,若获取的点云不包含该信息,则需要利用轨迹数据计算点云扫描距离数据。
(2)校正方法
校正方法通常包括比值法和差值法。
比值法是利用参考距离处的拟合值与各点对应距离拟合值的比值作为增益系数,从而修正原有的强度信息;
而差值法,即利用参考距离处的拟合值减去各点对应距离拟合值的差值作为增益系数。
式中,![]() 为参考距离,通常为点云中的最小距离。
为参考距离,通常为点云中的最小距离。
结果展示
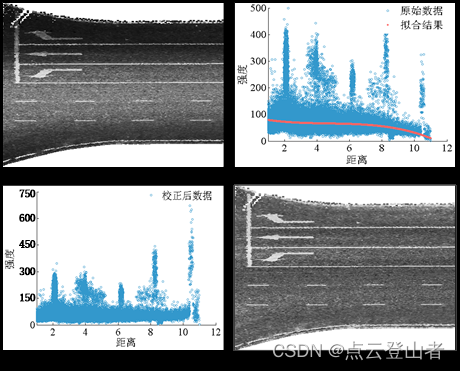
此处通过比值法,采用三次多项式函数构建距离-强度关系模型校正强度,消除扫描距离对反射强度的影响,实现路面点云强度相对校正。图(左上)为路面点云数据,图(右上)是距离-强度关系模型拟合结果,从该图可以看出,基于同质点云拟合得到的校正模型,能够较好地描述原始点云数据的距离-强度关系。图(左下)为通过融合比值法和差值法获得的校正结果,该图表明校正后的强度值不再随距离的增加而出现明显衰减,从图(右下)中可以直观地观察到,强度随距离的增加而出现衰减这一情况得到有效抑制,道路中央区域与边缘区域的强度一致性得到有效改善。
















 2843
2843











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











