







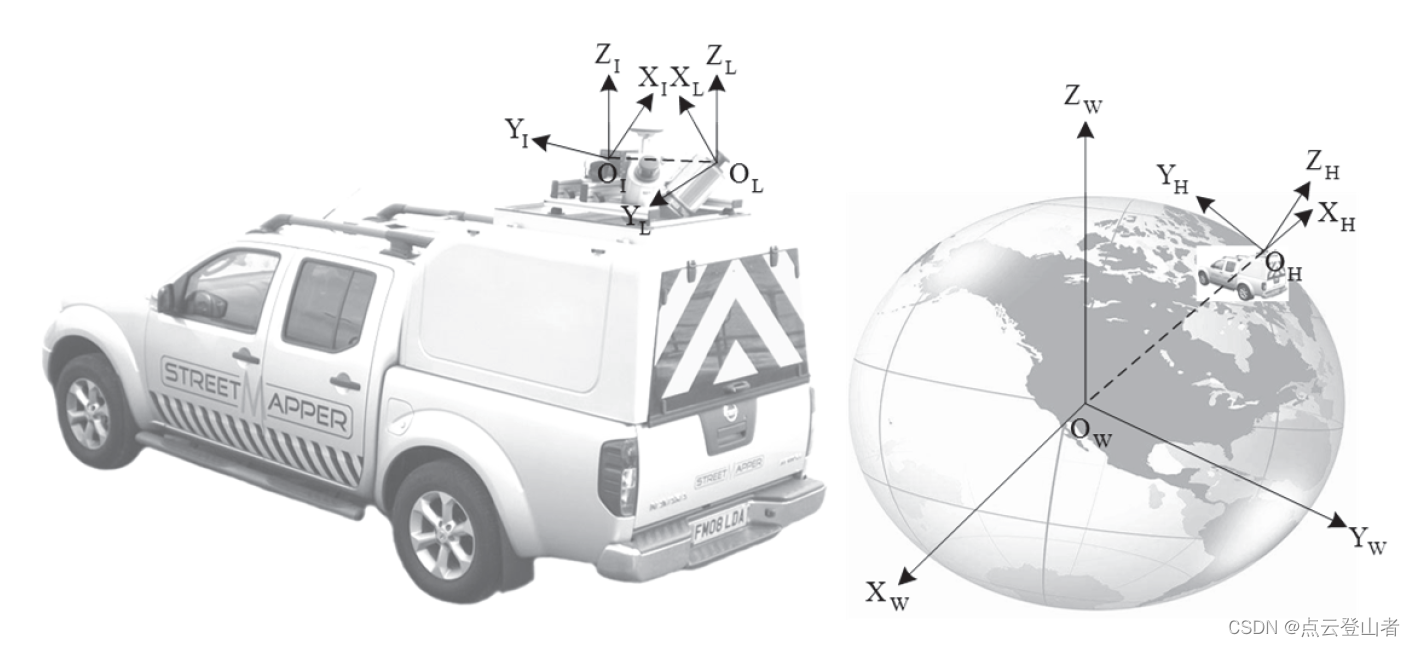
一 坐标系类别
1、激光扫描仪坐标系(一般由厂商自己定义):,MLS系统通常使用2D扫描仪,以激光发射中心为原点
,
为扫描平面起始方向,
在扫描平面内与
垂直,
垂直扫描平面,形成右手系
。
2、惯导坐标系:,原点
一般定义为IMU的几何中心,
指向载体行驶方向,
与
垂直向右,
与
面垂直,形成右手系
。
3、当地水平坐标系:,原点
一般与
一致,
指向东,即卯酉圈方向,
指向真北方向,即参考椭球子午圈方向,
为参考椭球法向量,与
构成右手系。(注意:pos的姿态角是相对水平坐标系测定的)
4、GPS使用WGS84坐标系:,原点
为地球质心,以地球自转轴为
,
为指向赤道面内指向零度子午线,
垂直
面,形成右手系
。
二 激光点云解算过程的坐标转换流程
总体流程:激光雷达扫描得到的每个点(时间、水平视场角、垂直视场角、扫描距离)——》——》
——》
——》
:
扫描仪按时间记录每个点的角度和距离信息,再通过极坐标转换为空间直角坐标,将其转换为扫描仪坐标系坐标;
其中,为扫描距离,
为竖直角度值,
为水平角度值。
接着,根据扫描仪和IMU的相对位置关系,即安置参数,将扫描仪坐标转换为惯导坐标:
是扫描仪到惯导的旋转矩阵,
是扫描仪到惯导的平移矩阵,二者通常通过标定安置参数进行确定。
然后,计算载体的姿态角(roll/pitch/heading,翻滚角/俯仰角/航向角);其中,roll可以理解为载体水平轴与水平位置的夹角,pitch可以理解为载体与行驶方向平行的中心轴与地面之间的夹角,heading为载体与行驶方向平行的中心轴与正北(地球北极)方向的夹角。利用pos的姿态角构建旋转矩阵,将惯导坐标旋转到当地水平坐标系。
通常惯导坐标系与当地水平坐标系的原点一致。为惯导坐标系到当地水平坐标系的旋转矩阵,具体为
绕Y轴旋转顺时针r,绕X轴顺时针旋转p,绕Z轴顺时针旋转h形成复合矩阵:
其中:
最后,根据pos的(B,L,H,纬度、经度、大地高)构建变换矩阵,将当地水平坐标转换为WGS84坐标。
为
绕X轴顺时针旋转90°-B,再绕Z轴顺时针旋转90°+L形成的复合矩阵:
其中,
为载体在
中的位置:
其中,是WGS84参考椭球卯酉圈曲率半径,
=6378137m为子午圈长轴半径,
为第一偏心率,
,
三 空间直角坐标系与其高斯投影平面坐标系之间的转换
实际工程应用中,采用参考椭球坐标系或其高斯投影平面坐标系。
空间直角坐标系转高斯投影坐标系的过程为:先将空间直角坐标转为经纬度和大地高,再将经纬度投影成高斯坐标,即参考椭球坐标系——>大地坐标系——>高斯投影平面坐标系
3.1 大地坐标转空间直角坐标
b为子午圈短轴半径。
3.2空间直角坐标转大地坐标
3.2.1 直接求解法
是第一偏心率,
,
是第二偏心率,
,
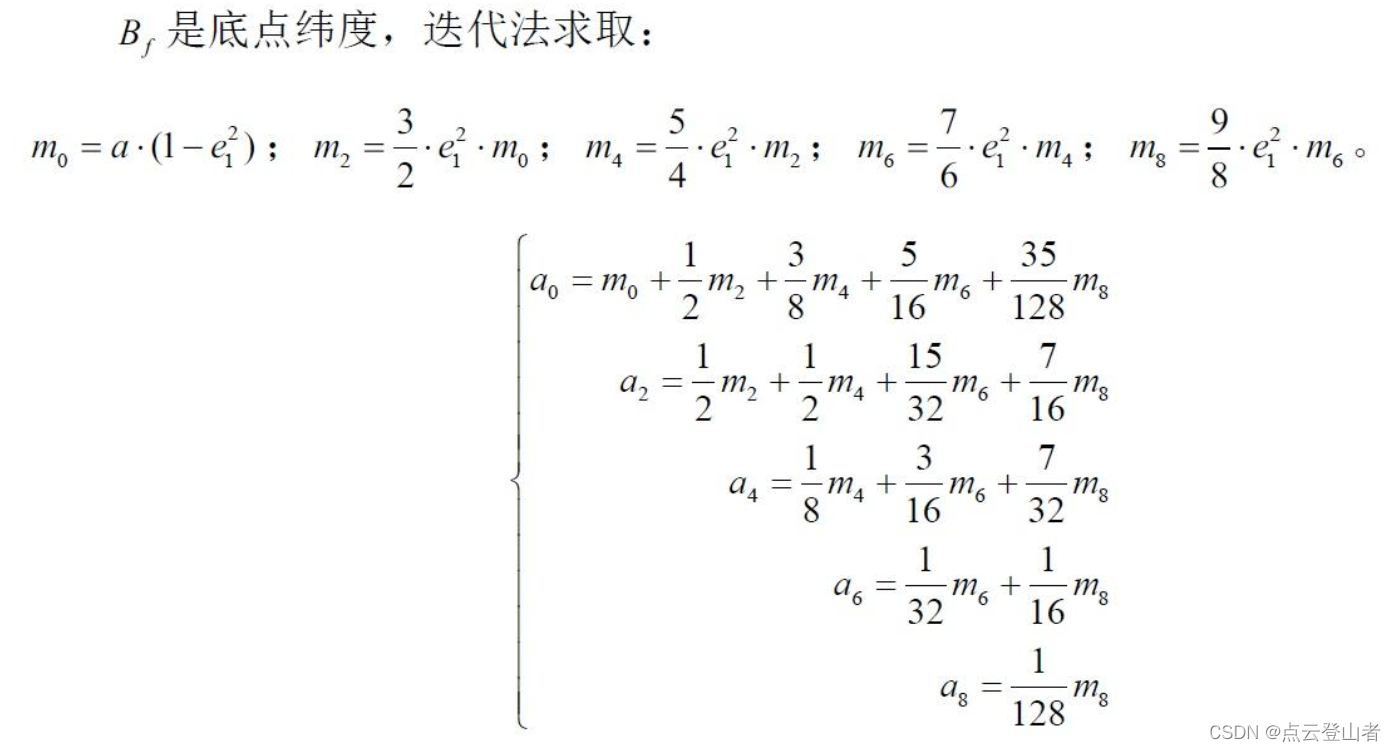
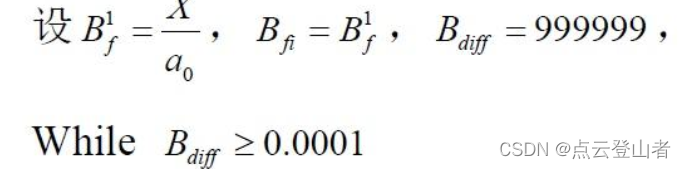
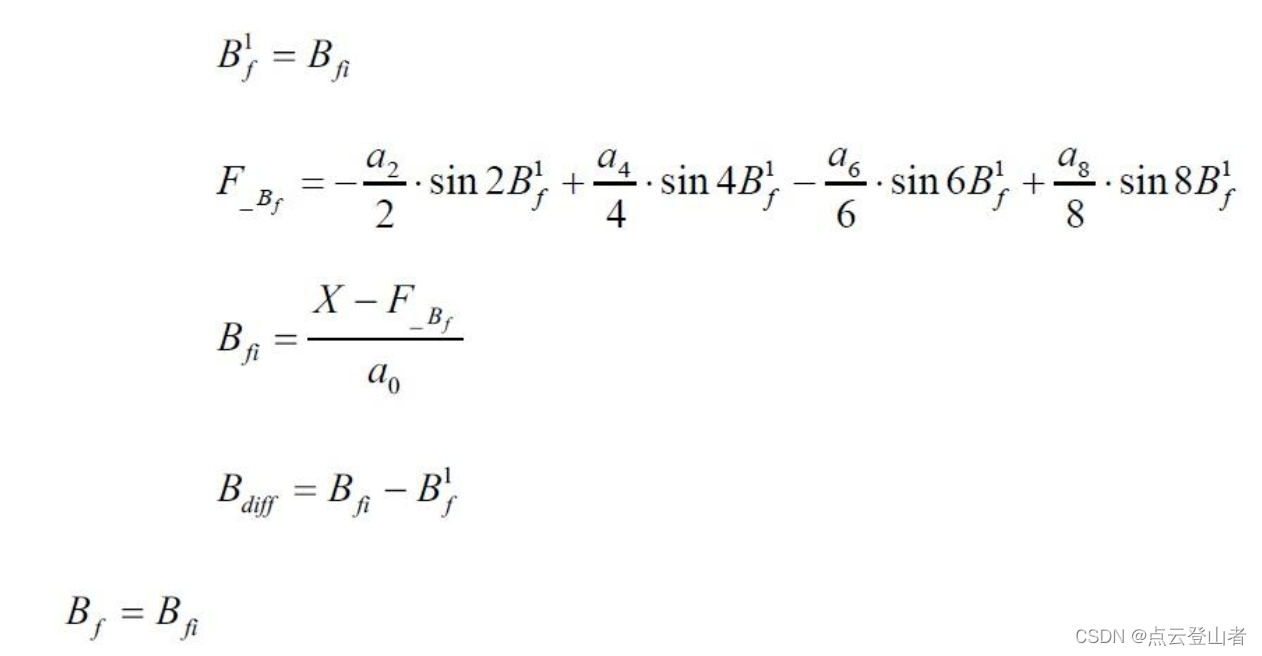
3.2.2 迭代法
迭代时,通过计算得到B的初始值
,然后通过初始值
计算N和sinB,从而得到B的估计值,多次迭代,直到前后两次B值之差达到所设置的误差精度则停止。
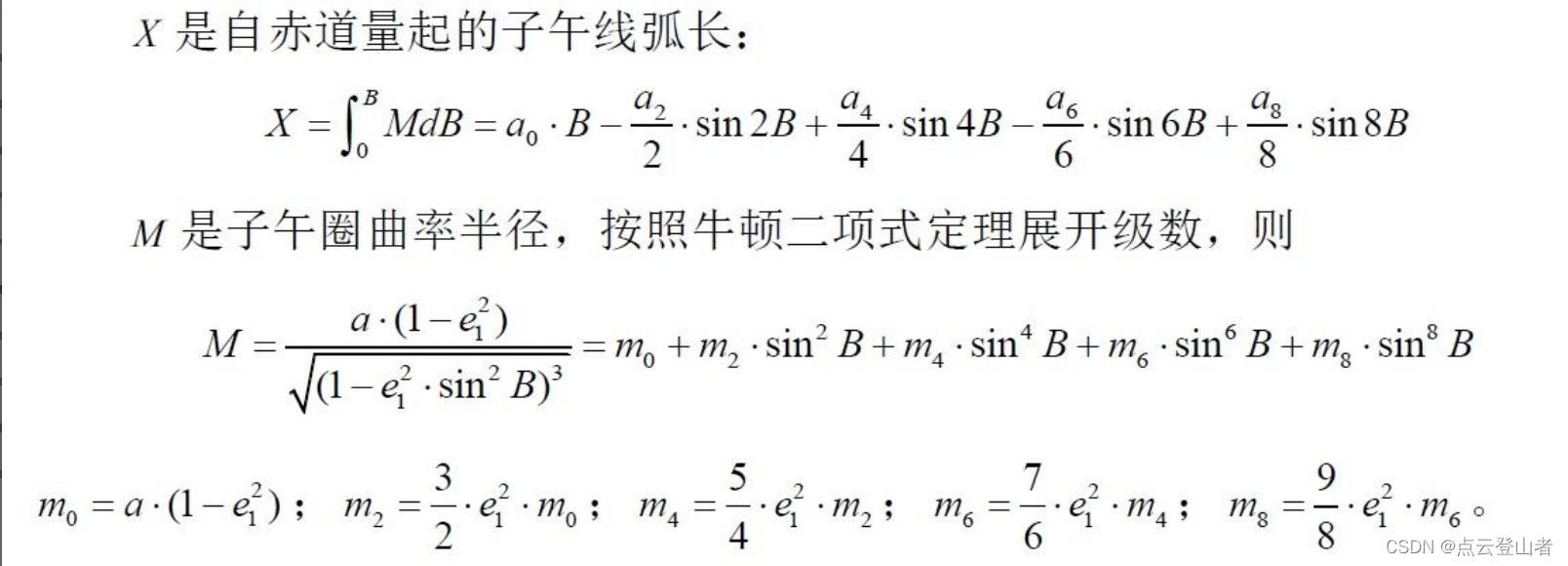
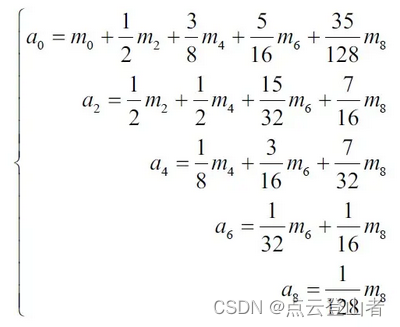
3.3高斯投影正算
即从大地坐标到高斯投影平面坐标系的转换,转换公式为:
,
,
是中央子午线的精度;
;
3.4高斯投影反算


![]()
4 参考
[1]车载LiDAR 点云数据质量改善方法研究
















 4689
4689











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











