







 本文详述了STM32F407通过I2C通信协议驱动SHT30传感器的过程,包括I2C的初始化、时序、起始和停止信号、应答信号、数据发送与接收,以及SHT30的初始化、数据读取和处理。代码已通过测试,能够精确测量温度和湿度,适合SHT30初学者参考。
本文详述了STM32F407通过I2C通信协议驱动SHT30传感器的过程,包括I2C的初始化、时序、起始和停止信号、应答信号、数据发送与接收,以及SHT30的初始化、数据读取和处理。代码已通过测试,能够精确测量温度和湿度,适合SHT30初学者参考。
SHT30使用的学习过程2代码篇
给各位道个歉,代码拖得有点久了,最近事情颇多,抱歉抱歉!
综述
嗯,代码篇我想把我写的所有的代码给各位需要使用sht30的朋友们介绍一遍,由于我这版是测试版,所以很多函数没有封装的很好,不过代码可以用了,我测试的代码已经通过,测量温度和湿度精确到小数点后1位,在这里想仔细给各位介绍一下我代码的写作过程,因为网上的代码仅仅是代码,很多开发sht30的小白(像我这样的)没办法移植,或者根本不知道怎么移植,在这里我想详细叙述我的代码,包括最基本的I2C通信,所以可能本次内容很啰嗦,希望各位见谅哈[by zwx lvmm]
I2C代码部分
这部分是SHT30和单片机通信的基础协议,I2C有四根线组成,除去vcc和gnd之外还有SCL (时钟线)与 SDA (数据线),STM32F407参考手册上写,I2C最大的通信周期是4MHz,普通模式下是2MHz。这部分涉及I2C通信的时序,可以参考原子哥(正点原子)的相关视频资源,我的基础也是和原子哥的视频学习的,这里简单介绍一下,有什么不清楚的可以参考原子哥的视频。
- I2C时序:
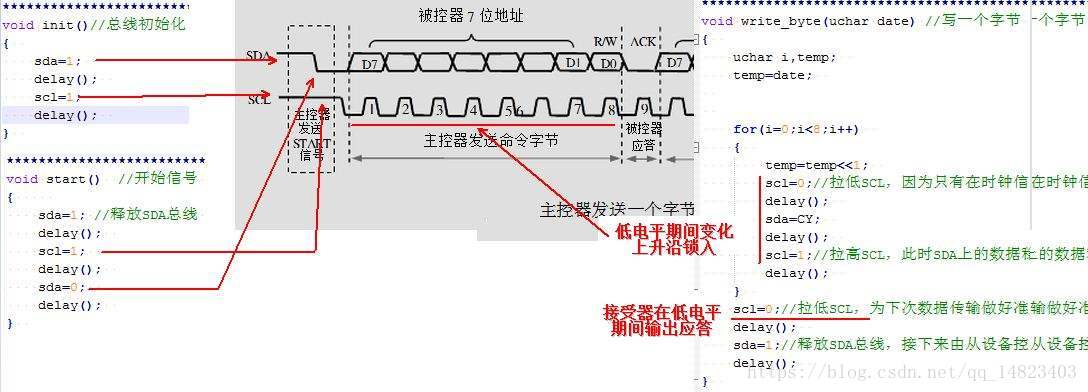
这个是I2C时序图。整个I2C通信分为这样几个过程,I2C起始信号,I2C数据写入,I2C数据读取,I2C应答信号,I2C结束信号等,接下来分别介绍。(代码参考的原子哥代码,我看懂了直接用的)
1.1 IO初始化:
上代码,我的开发板是STM32F407,这部分属于初始化配置,没啥说的。
//IO方向设置
#define SDA_IN() {
GPIOB->MODER&=~(3<<(11*2));GPIOB->MODER|=0<<11*2;} //PB11输入模式
#define SDA_OUT() {
GPIOB->MODER&=~(3<<(11*2));GPIOB->MODER|=1<<11*2;} //PB11输出模式
//IO操作函数
#define IIC_SCL PBout(10) //SCL
#define IIC_SDA PBout(11) //SDA
#define READ_SDA PBin(11) //输入SDA
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOB时钟
//GPIOB10,B11初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
IIC_SCL=1;
IIC_SDA=1;
}
此部分代码看的原子哥的,IO配置的方法也是学习原子哥的设置的。
1.2 I2C起始信号:
如最开始的图所示当SCL是高电平的时候,把SDA从高电平拉至低电平就可以了,先上这部分的代码
void IIC_Start(void)
{
SDA_OUT(); //sda线输出模式
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//开始信号,scl=1,sda=1->sda=0。
delay_us(4);
IIC_SCL=0;//scl=0,拉低时钟线,准备数据的发送
}
这里为什么是延时4us,我猜测是按照标准频率2MHz,最高4MHz计算一下,一个数据周期大概5us-2.5us之间,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









