






 本文详细介绍了图像处理中两种常见的分块技术:不重叠分块与重叠分块。阐述了分块处理的必要性,特别是在内存受限或并行处理场景下。深入探讨了重叠分块的实现原理,包括如何解决图像接边缝问题,以及在立体匹配中的应用,通过初始视差驱动优化分块效果。
本文详细介绍了图像处理中两种常见的分块技术:不重叠分块与重叠分块。阐述了分块处理的必要性,特别是在内存受限或并行处理场景下。深入探讨了重叠分块的实现原理,包括如何解决图像接边缝问题,以及在立体匹配中的应用,通过初始视差驱动优化分块效果。

01
不重叠分块
效果:
-
clear; clc; img = imread('/media/P1.jpg'); %% resize the image into the new size with 500x*500y r_img = img(:, :, 1); g_img = img(:, :, 2); b_img = img(:, :, 3); [row, col] = size(r_img); new_row = ceil(row/500) * 500; new_col = ceil(col/500) * 500; new_r_img = imresize(r_img, [new_row new_col], 'bilinear'); new_g_img = imresize(g_img, [new_row new_col], 'bilinear'); new_b_img = imresize(b_img, [new_row new_col], 'bilinear'); new_img(:, :, 1) = new_r_img; new_img(:, :, 2) = new_g_img; new_img(:, :, 3) = new_b_img; [y_row y_col dim] = size(new_img); row_blk_num = y_row/500; % 3 col_blk_num = y_col/500; % 6 no overlap blocks = 1; for i = 1:row_blk_num for j = 1:col_blk_num disp(blocks); block = new_img((i - 1) * 500 + 1 : i * 500, (j - 1) * 500 + 1 : j * 500, :); imwrite(block, ['./' num2str(blocks) '.jpg']); blocks = blocks + 1; end end
02
重叠(重叠大小为块的一半)
效果:
1. 图像直接分块的问题;
2. 图像重叠分块的实现原理介绍;
3. 立体匹配中的图像重叠分块的方法介绍;
1. 图像直接分块的问题
由于内存的限制或为了实现并行处理,对图像进行分块处理是必要的。如果仅仅对图像进行分块处理,然后把处理的图像块进行简单的拼接,容易导致界边处缝的问题(如下图所示)。所以,需要在图像分块时使得相邻图像块有一定的重叠,然后选择最优的处理结果填充重叠区域,从而消除接边缝。
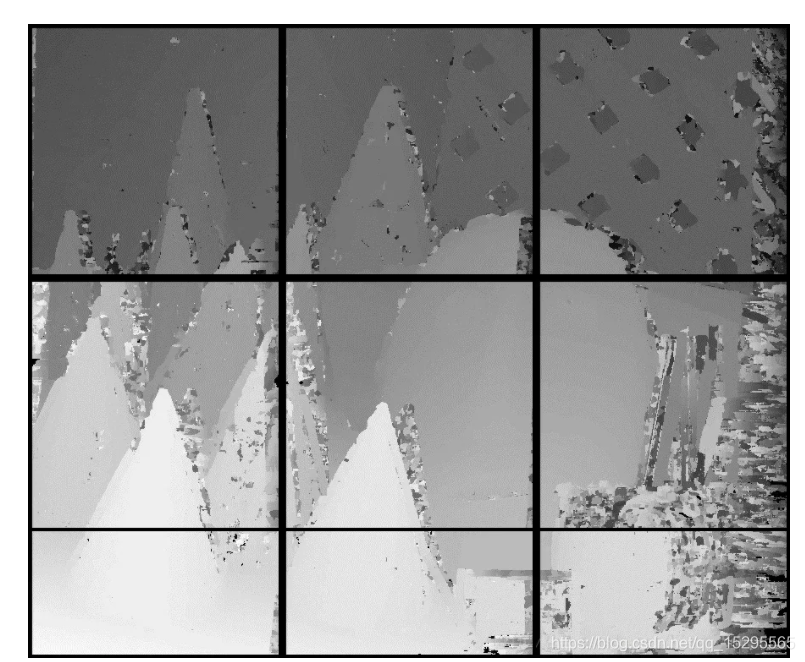
图 1. 左图为直接分块处理结果,右图为重叠分块处理结果
2. 图像重叠分块的实现原理介绍
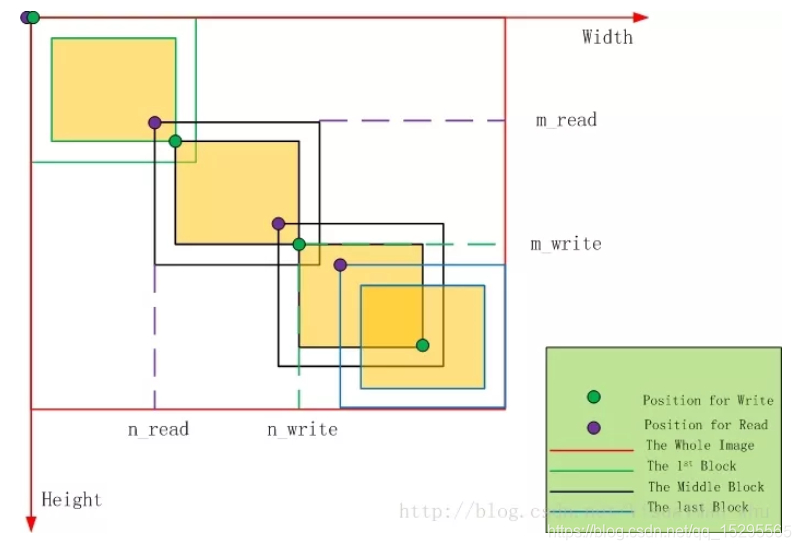
图 2. 图像分块原理示意图
如上图所示,图像重叠分块时,有三个Block,三个Position和一个Principle:
三个Block是:起始Block,中间Block和边缘Block;
三个Position是:Block在原始图像的读取和写入位置,处理结果有效内容在Block自身的位置;
一个 Principle是:各个Block处理结果的有效部分应该保持保持无缝连接;
基于以上思路,我们列出图像分块时的几个关键参数:
图像纵向块数:m_Tile = (height-BLOCKOVERLAP_Y-1)/(BLOCKHEIGHT-2*BLOCKOVERLAP_Y)+1
图像横向块数:nTile = (width-BLOCKOVERLAP_X-1)/(BLOCKWIDTH-2*BLOCKOVERLAP_X)+1
其中,width和height为原始图像的宽高,BLOCKWIDTH和BLOCKHEIGHT为图像块的宽高,BLOCKOVERLAP_X和BLOCKOVERLAP_Y为图像块横向和纵向的重叠尺寸。因为横向和纵向的公式是完全类似的,为了简便起见,下面我们用size,BLOCK,OVERLAP来相应代替上面的三个量。
图像重叠分块参数表
i_Read i_Write i_Offset
1st 0 0 0
Middle i*(BLOCK-2*OVERLAP) i_Read+OVERLAP OVERLAP
Last size-BLOCK (i+1)*BLOCK-(2*i-1)*OVERLAP-size (i+1)*BLOCK-(2*i-1)*OVERLAP-size
上面的表中还有一项i_Offset表示的是Block处理结果的有效内容的起始位置,在写入图像时,要从Block的此位置开始读取内容并写入原始图像从i_Write开始的内存中。
3. 立体匹配中的图像重叠分块的方法介绍
立体匹配中使用分块处理的方法和一般的图像处理的分块方法不同,因为Block之间的对应需要一个初始的视差来驱动,否则可能导致图像块之间没有很好的重叠(如图3所示)。

图 3. 无初始视差驱动的航空影像分块处理
所以,如果有初始视差图来驱动,就可以很好地实现影像分块,而且这时不仅可以解除内存限制或者实现并行处理,还可以减小每个图像块的视差搜索范围,因此最终还有可能减少误匹配率。
代码:
clear;
clc;
img = imread('/media/P1.jpg');
%% resize the image into the new size with 16x*16y
r_img = img(:, :, 1);
g_img = img(:, :, 2);
b_img = img(:, :, 3);
[row, col] = size(r_img);
new_row = ceil(row/500) * 500;
new_col = ceil(col/500) * 500;
new_r_img = imresize(r_img, [new_row new_col], 'bilinear');
new_g_img = imresize(g_img, [new_row new_col], 'bilinear');
new_b_img = imresize(b_img, [new_row new_col], 'bilinear');
new_img(:, :, 1) = new_r_img;
new_img(:, :, 2) = new_g_img;
new_img(:, :, 3) = new_b_img;
[y_row y_col dim] = size(new_img);
row_blk_num = (y_row-250)/250; % 5
col_blk_num = (y_col-250)/250; % 11
blocks = 1;
for i = 1:row_blk_num
for j = 1:col_blk_num
disp(blocks);
block = new_img((i - 1) * 250 + 1 : (i+1) * 250, (j - 1) * 250 + 1 : (j+1) * 250, :);
imwrite(block, ['./' num2str(blocks) '.jpg']);
blocks = blocks + 1;
end
end


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









