







目录
图像滤波的目的:
一是抽出对象的特征作为图像识别的特征模式;另一个是为适应图像处理的要求,消除图像数字化时所混入的噪声。
滤波处理的要求
一是不能损坏图像的轮廓及边缘等重要信息;二是使图像清晰视觉效果好。
平滑滤波目的有两类
一类是模糊;另一类是消除噪音。平滑滤波是低频增强的空间域滤波技术。
OpenCV常用线性滤波器:
- 方框滤波——boxblur函数
- 均值滤波(邻域平均滤波)——blur函数
- 高斯滤波——GaussianBlur函数
OpenCV常用非线性滤波器:
- 中值滤波——medianBlur函数
- 双边滤波——bilateralFilter函数
线性滤波器定义及常用的线性滤波器:
线性滤波器经常用于剔除输入信号中不想要的频率或者从许多频率中选择一个想要的频率
- 允许低频率通过的低通滤波器。
- 允许高频率通过的高通滤波器。
- 允许一定范围频率通过的带通滤波器。
- 阻止一定范围频率通过并且允许其它频率通过的带阻滤波器。
- 允许所有频率通过、仅仅改变相位关系的全通滤波器。
- 阻止一个狭窄频率范围通过的特殊带阻滤波器,陷波滤波器(Band-stop filter)。
滤波和模糊
滤波可分低通滤波和高通滤波两种
低通滤波是模糊图像;高通滤波是锐化图像
举例:高斯滤波:模糊就是高斯低通滤波,高斯滤波可以高通滤波也可以是低通滤波
邻域算子与线性滤波器
邻域算子(局部算子)是利用给定像素周围的像素值的决定此像素的最终输出值的一种算子。
邻域算子除了用于局部色调调整以外,还可以用于图像滤波,实现图像的平滑和锐化,图像边缘增强或者图像噪声的去除。
而线性邻域滤波是一种常用的邻域算子,像素的输出值取决于输入像素的加权和
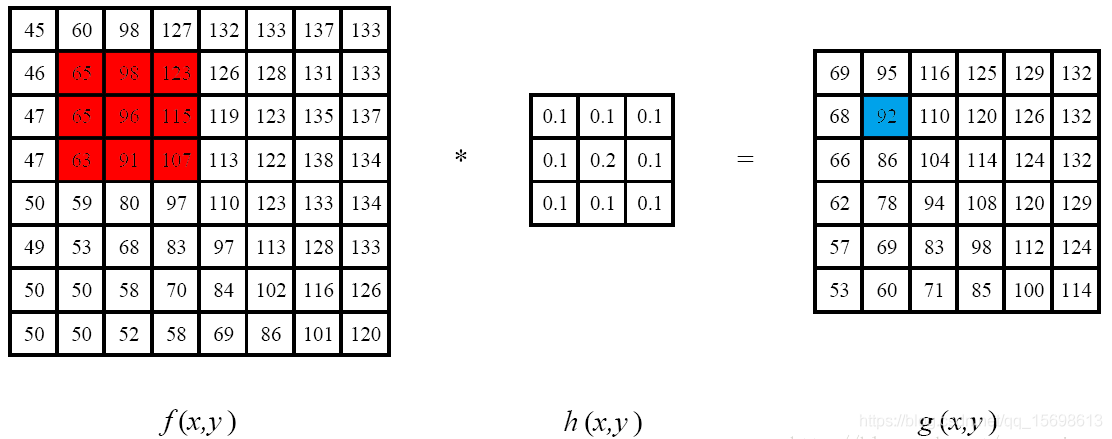
以上图为例:
原始图像是8行8列的。算子h是3行3列,每个小格子代表的是权重,与原始图像上每3*3的格子想成得到滤波后的值
比如红色是原始的,乘以h,得到蓝色的
原始图像是8*8的,经过乘以3*3的算子,就变成了6
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 442
442











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









