








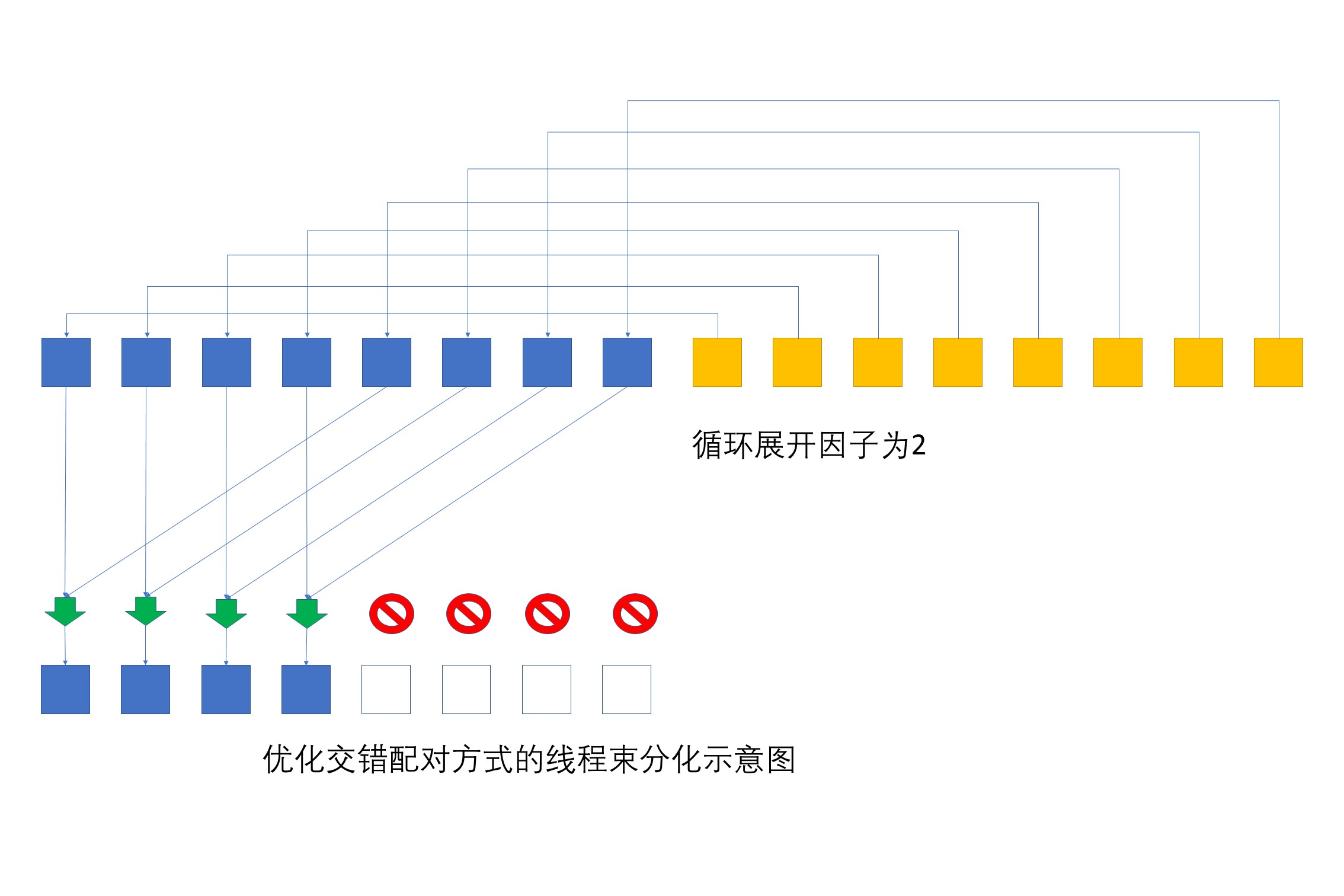
之前的规约计算,每个线程块负责一个对应的数据块。现在将每个线程块负责两个数据块的规约,从而达到消除指令消耗,增加更多的独立指令的调度,来提高性能。下面是展开因子为2的示意图,将相邻的数据块加到当前线程块对应的数据块,然后进行规约求和。
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include "math.h"
#include "stdlib.h"
//错误检查的宏定义
#define CHECK(call) \
{ \
const cudaError_t status=call; \
if (status!=cudaSuccess) \
{ \
printf("文件:%s,函数:%s,行号:%d\n",__FILE__, \
__FUNCTION__,__LINE__); \
printf("%s", cudaGetErrorString(status)); \
exit(1); \
} \
} \
//核函数
__global__ void Kernel(int *d_data, int *d_local_sum, int N)
{
int tid = threadIdx.x;
int index = 2*blockIdx.x*blockDim.x + threadIdx.x;
int *data = d_data +2*blockIdx.x*blockDim.x;
if (index + blockDim.x < N) d_data[index] += d_data[index+blockDim.x];
__syncthreads();
for (int strize = blockDim.x / 2; strize > 0; strize >>= 1)
{
if (tid < strize)
data[tid] += data[tid + strize];
__syncthreads();
}
if (tid == 0)
{
d_local_sum[blockIdx.x] = data[0];
}
}
//主函数
int main()
{
//基本参数设置
cudaSetDevice(0);
const int N = 1 << 29;
int local_length = 1024;
long long total_sum = 0;
dim3 grid(((N + local_length - 1) / local_length), 1);
dim3 block(local_length, 1);
int *h_data = nullptr;
int *h_local_sum = nullptr;
int *d_data = nullptr;
int *d_local_sum = nullptr;
//Host&Deivce内存申请及数组初始化
h_data = (int*)malloc(N * sizeof(int));
h_local_sum = (int*)malloc(int(grid.x/2) * sizeof(int));
CHECK(cudaMalloc((void**)&d_data, N * sizeof(int)));
CHECK(cudaMalloc((void**)&d_local_sum, int(grid.x / 2) * sizeof(int)));
for (int i = 0; i < N; i++)
h_data[i] = int(10 * sin(0.02*3.14*i));//限制数组元素值,防止最终求和值超过long long的范围
//数据拷贝至Device
CHECK(cudaMemcpy(d_data, h_data, N * sizeof(int), cudaMemcpyHostToDevice));
//for (int i = 0; i < 200; i++)
//执行核函数
Kernel << <grid.x/2, block >> > (d_data, d_local_sum, N);
//数据拷贝至Host
CHECK(cudaMemcpy(h_local_sum, d_local_sum, int(grid.x/2) * sizeof(int),
cudaMemcpyDeviceToHost));
//同步&重置设备
CHECK(cudaDeviceSynchronize());
CHECK(cudaDeviceReset());
for (int i = 0; i < int(grid.x / 2); i++)
{
total_sum += h_local_sum[i];
}
printf("%I64d \n", total_sum);
//getchar();
return 0;
}同理,可以将展开因子调整为4和8,下面给出展开因子为4的示意图,8的线条太多了。

展开因子为4的代码:
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include "math.h"
#include "stdlib.h"
//错误检查的宏定义
#define CHECK(call) \
{ \
const cudaError_t status=call; \
if (status!=cudaSuccess) \
{ \
printf("文件:%s,函数:%s,行号:%d\n",__FILE__, \
__FUNCTION__,__LINE__); \
printf("%s", cudaGetErrorString(status)); \
exit(1); \
} \
} \
//核函数
__global__ void Kernel(int *d_data, int *d_local_sum, int N)
{
int tid = threadIdx.x;
int index = 4 * blockIdx.x*blockDim.x + threadIdx.x;
int *data = d_data + 4 * blockIdx.x*blockDim.x;
if (index + 3 * blockDim.x < N)
{
int a = d_data[index];
int a1 = d_data[index + blockDim.x];
int a2 = d_data[index + 2 * blockDim.x];
int a3 = d_data[index + 3 * blockDim.x];
d_data[index] = (a+ a1+ a2 +a3 );
}
__syncthreads();
for (int strize = blockDim.x / 2; strize > 0; strize >>= 1)
{
if (tid < strize)
data[tid] += data[tid + strize];
__syncthreads();
}
if (tid == 0)
{
d_local_sum[blockIdx.x] = data[0];
}
}
//主函数
int main()
{
//基本参数设置
cudaSetDevice(0);
const int N = 1 << 29;
int local_length = 1024;
long long total_sum = 0;
dim3 grid(((N + local_length - 1) / local_length), 1);
dim3 block(local_length, 1);
int *h_data = nullptr;
int *h_local_sum = nullptr;
int *d_data = nullptr;
int *d_local_sum = nullptr;
//Host&Deivce内存申请及数组初始化
h_data = (int*)malloc(N * sizeof(int));
h_local_sum = (int*)malloc(int(grid.x / 4) * sizeof(int));
CHECK(cudaMalloc((void**)&d_data, N * sizeof(int)));
CHECK(cudaMalloc((void**)&d_local_sum, int(grid.x / 4) * sizeof(int)));
int s = 0;
for (int i = 0; i < N; i++)
{
h_data[i] = int(10 * sin(0.02*3.14*i));//限制数组元素值,防止最终求和值超过long long的范围
s += h_data[i];
}
//数据拷贝至Device
CHECK(cudaMemcpy(d_data, h_data, N * sizeof(int), cudaMemcpyHostToDevice));
//for (int i = 0; i < 200; i++)
//执行核函数
Kernel << <grid.x / 4, block >> > (d_data, d_local_sum, N);
//数据拷贝至Host
CHECK(cudaMemcpy(h_local_sum, d_local_sum, int(grid.x / 4) * sizeof(int),
cudaMemcpyDeviceToHost));
//同步&重置设备
CHECK(cudaDeviceSynchronize());
CHECK(cudaDeviceReset());
for (int i = 0; i < int(grid.x/4); i++)
{
total_sum += h_local_sum[i];
}
printf("%I64d \n", total_sum);
//getchar();
return 0;
}#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <stdio.h>
#include "math.h"
#include "stdlib.h"
//错误检查的宏定义
#define CHECK(call) \
{ \
const cudaError_t status=call; \
if (status!=cudaSuccess) \
{ \
printf("文件:%s,函数:%s,行号:%d\n",__FILE__, \
__FUNCTION__,__LINE__); \
printf("%s", cudaGetErrorString(status)); \
exit(1); \
} \
} \
//核函数
__global__ void Kernel(int *d_data, int *d_local_sum, int N)
{
int tid = threadIdx.x;
int index = 8 * blockIdx.x*blockDim.x + threadIdx.x;
int *data = d_data + 8 * blockIdx.x*blockDim.x;
if (index + 7 * blockDim.x < N)
{
int a = d_data[index];
int a1 = d_data[index + blockDim.x];
int a2 = d_data[index + 2 * blockDim.x];
int a3 = d_data[index + 3 * blockDim.x];
int a4 = d_data[index + 4 * blockDim.x];
int a5 = d_data[index + 5 * blockDim.x];
int a6 = d_data[index + 6 * blockDim.x];
int a7 = d_data[index + 7 * blockDim.x];
d_data[index] = (a + a1 + a2 + a3+ a4+ a5+ a6 + a7);
}
__syncthreads();
for (int strize = blockDim.x / 2; strize > 0; strize >>= 1)
{
if (tid < strize)
data[tid] += data[tid + strize];
__syncthreads();
}
if (tid == 0)
{
d_local_sum[blockIdx.x] = data[0];
}
}
//主函数
int main()
{
//基本参数设置
cudaSetDevice(0);
const int N = 1 << 29;
int local_length = 1024;
long long total_sum = 0;
dim3 grid(((N + local_length - 1) / local_length), 1);
dim3 block(local_length, 1);
int *h_data = nullptr;
int *h_local_sum = nullptr;
int *d_data = nullptr;
int *d_local_sum = nullptr;
//Host&Deivce内存申请及数组初始化
h_data = (int*)malloc(N * sizeof(int));
h_local_sum = (int*)malloc(int(grid.x / 8) * sizeof(int));
CHECK(cudaMalloc((void**)&d_data, N * sizeof(int)));
CHECK(cudaMalloc((void**)&d_local_sum, int(grid.x / 8) * sizeof(int)));
int s = 0;
for (int i = 0; i < N; i++)
{
h_data[i] = int(10 * sin(0.02*3.14*i));//限制数组元素值,防止最终求和值超过long long的范围
s += h_data[i];
}
//数据拷贝至Device
CHECK(cudaMemcpy(d_data, h_data, N * sizeof(int), cudaMemcpyHostToDevice));
//for (int i = 0; i < 200; i++)
//执行核函数
Kernel << <grid.x / 8, block >> > (d_data, d_local_sum, N);
//数据拷贝至Host
CHECK(cudaMemcpy(h_local_sum, d_local_sum, int(grid.x / 8) * sizeof(int),
cudaMemcpyDeviceToHost));
//同步&重置设备
CHECK(cudaDeviceSynchronize());
CHECK(cudaDeviceReset());
for (int i = 0; i < int(grid.x / 8); i++)
{
total_sum += h_local_sum[i];
}
printf("%I64d \n", total_sum);
//getchar();
return 0;
}














 1016
1016











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









