







引言
在快速发展的嵌入式系统领域,实时操作系统(RTOS)的作用日益凸显,成为推动高效、可靠系统开发的关键组成部分。作为RTOS的杰出代表之一,μC/OS-II因其强大的功能和灵活的配置,已成为许多嵌入式项目的首选。不仅因为它能够提供丰富的多任务处理能力,还因为它在资源管理、任务调度和时间管理等方面的卓越性能。
μC/OS-II是一款免费的、可裁剪的、抢占式的实时操作系统内核。它设计用于多任务环境,特别适用于那些对实时响应有严格要求的嵌入式应用。与传统的嵌入式编程相比,μC/OS-II不仅能够提升系统的稳定性和响应速度,还能显著提高开发效率和系统可维护性
在本文中,我们将深入探讨μC/OS-II在单片机开发中的应用。从基本的配置和初始化,到高级功能如任务同步、内存管理等,本文旨在为想要在其项目中实现或优化RTOS使用的开发者提供一个全面的指导。我们将通过实例来展示μC/OS-II如何有效地解决实际问题,使得复杂的系统设计变得简单可行。无论您是RTOS的初学者,还是希望在现有项目中整合μC/OS-II,本文都将为您提供宝贵的视角和建议。
一、UCOS-II 是什么?
在探讨μC/OS-II在单片机开发中的应用之前,首先了解这个实时操作系统的核心特性和基本架构是非常重要的。
1.1 μC/OS-II的核心特性
- 可抢占的多任务处理:μC/OS-II支持抢占式多任务处理,允许创建多个任务并根据任务的优先级进行有效管理。这种抢占式调度使得高优先级任务能够及时响应,确保关键任务的执行不会被低优先级任务阻塞。
- 固定优先级调度:每个任务在创建时被赋予一个
固定的优先级,RTOS根据这些优先级决定任务执行的顺序。这种策略简化了调度机制,同时提供了预测性的任务响应。 - 时间管理能力:μC/OS-II提供了精确的时间管理功能,包括延时和定时器服务,使得任务可以根据时间要求进行调度。
- 丰富的同步机制:提供了信号量、互斥量和消息队列等同步工具,帮助解决多任务环境中的资源共享和通信问题。
- 可裁剪性和模块化设计:μC/OS-II的模块化设计允许开发者根据项目需求选择所需的组件,提高了代码的可维护性和系统的灵活性
1.2 μC/OS-II的架构
- μC/OS-II的架构是围绕核心调度器构建的,核心调度器负责管理任务的创建、删除、挂起和唤醒。
- 除了核心调度器,μC/OS-II还包括了丰富的服务和库函数,用于支持任务同步、时间管理和资源管理等。
- μC/OS-II的核心是高度可配置的,适用于各种规模和复杂程度的嵌入式系统。
1.3 为何选择μC/OS-II
- 对于那些需要精确时间控制和高可靠性的嵌入式应用,如工业控制、医疗设备和复杂的消费电子产品,μC/OS-II提供了一个坚实的基础。
- μC/OS-II的可扩展性和灵活性使其成为一个理想的选择,特别是在资源受限的单片机系统中。
二、UC/OS-II 在单片机开发中的基本设置
要在单片机项目中有效地运用μC/OS-II,首先需要掌握其基础配置和初始化步骤。这些步骤不仅涉及操作系统本身的设置,还包括如何在特定的硬件环境中部署和运行μC/OS-II。
2.1 初始化μC/OS-II:
- 系统启动时的初始化:在单片机的启动代码中,通常首先进行的是硬件相关的初始化,紧接着是μC/OS-II的初始化。这包括调用 OSInit() 函数来初始化μC/OS-II的内部结构和变量。
OS_CPU_SysTickInit(); // 系统滴答时钟初始化
OSInit();
- 创建初始任务:系统初始化后,通常需要创建一个或多个初始任务。这可以通过
OSTaskCreate()函数完成。每个任务都有自己的任务函数、堆栈空间和优先级。
// 初始化任务 : 用于引导
void Task_start(void *p_arg){
(void)p_arg;
// 任务创建前需要关闭系统总中断,防止创建过程被打断
OS_CPU_SR cpu_sr = 0;
OS_ENTER_CRITICAL();
OSTaskCreate(RB_Task_led1,NULL,&task_led1_stk[TASK_LED1_STK_SIZE - 1],TASK_LED1_PRIO);
OSTaskCreate(RB_Task_led2,NULL,&task_led2_stk[TASK_LED2_STK_SIZE - 1],TASK_LED2_PRIO);
OSTaskCreate(RB_Task_led3,NULL,&task_led3_stk[TASK_LED3_STK_SIZE - 1],TASK_LED3_PRIO);
// 起始任务删除
OSTaskDel(STARTUP_TASK_PRIO);
// 重启中断
OS_EXIT_CRITICAL();
}
2.2 任务管理
- 创建任务:在μC/OS-II中,任务是基本的执行单元。创建任务涉及为任务指定一个
唯一的优先级、分配堆栈空间和定义任务函数。 - 任务优先级:μC/OS-II使用固定优先级的调度策略,这意味着每个任务在创建时被分配一个优先级,RTOS会根据这些优先级来调度任务。
// 起始任务 : 用于引导
void Task_start(void *p_arg){
(void)p_arg;
// 任务创建前需要关闭系统总中断,防止创建过程被打断
OS_CPU_SR cpu_sr = 0;
OS_ENTER_CRITICAL();
OSTaskCreate(RB_Task_led1,NULL,&task_led1_stk[TASK_LED1_STK_SIZE - 1],TASK_LED1_PRIO);
OSTaskCreate(RB_Task_led2,NULL,&task_led2_stk[TASK_LED2_STK_SIZE - 1],TASK_LED2_PRIO);
OSTaskCreate(RB_Task_led3,NULL,&task_led3_stk[TASK_LED3_STK_SIZE - 1],TASK_LED3_PRIO);
// 起始任务删除
OSTaskDel(STARTUP_TASK_PRIO);
// 重启中断
OS_EXIT_CRITICAL();
}
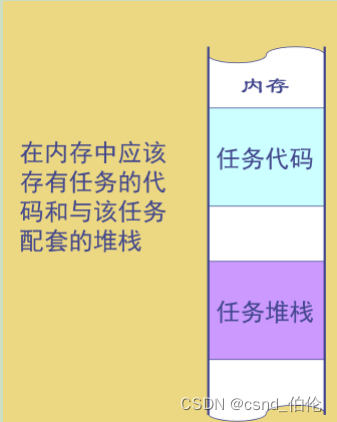
2.3 设置堆栈和优先级
- 堆栈分配:为每个任务分配足够的堆栈空间是至关重要的。堆栈空间不足可能导致堆栈溢出,而过大则会浪费资源。
- 优先级选择:合理地分配任务优先级可以确保关键任务及时响应,并有效地使用处理器资源。
// 给任务分配堆栈大小(每个任务都有自己的任务堆栈 )
#define STARTUP_TASK_STK_SIZE 128
#define TASK_LED1_STK_SIZE 128
#define TASK_LED2_STK_SIZE 128
#define TASK_LED3_STK_SIZE 128
// 设置好任务的优先级 (优先级高低和数字成反比,任务优先级必须唯一)
#define STARTUP_TASK_PRIO 7
#define TASK_LED1_PRIO 8
#define TASK_LED2_PRIO 9
#define TASK_LED3_PRIO 10
// 创建任务的堆栈空间
static OS_STK startup_task_stk[STARTUP_TASK_STK_SIZE];
static OS_STK task_led1_stk[TASK_LED1_STK_SIZE];
static OS_STK task_led2_stk[TASK_LED2_STK_SIZE];
static OS_STK task_led3_stk[TASK_LED3_STK_SIZE];
2.4 时间管理
- 系统时钟设置:μC/OS-II依赖于系统时钟来进行任务调度和时间管理。通常需要在系统启动时设置和启动系统时钟。
- 延时和定时器:μC/OS-II提供了任务延时(如
OSTimeDly())和定时器服务,以支持基于时间的任务调度。
通过以上步骤,我们可以将μC/OS-II嵌入到单片机项目中,创建一个能够高效运行多个任务的系统。
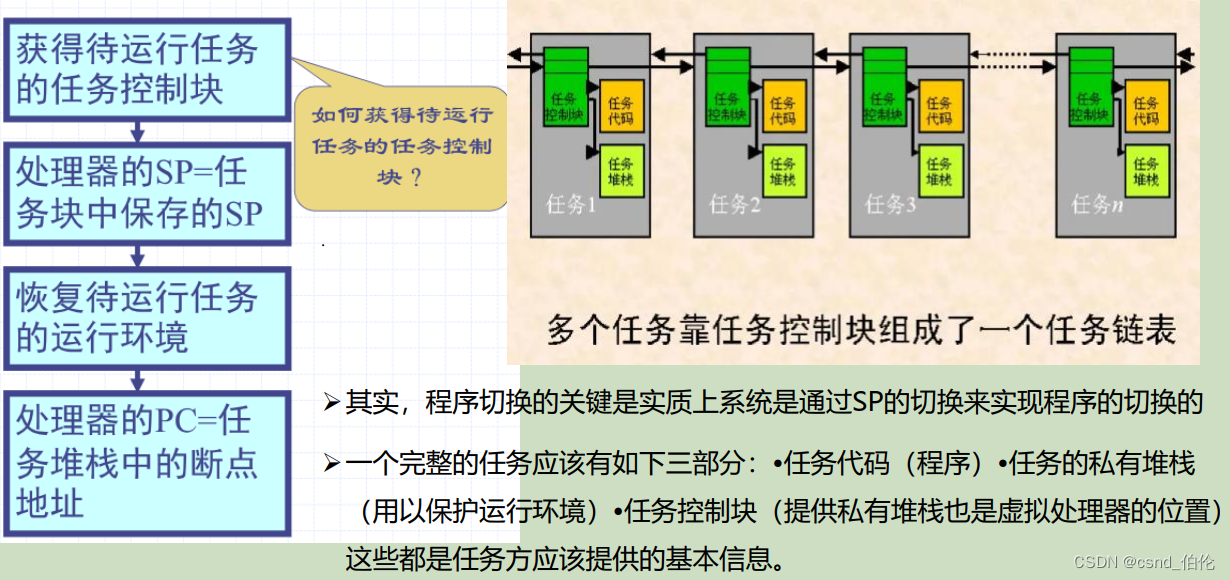
2.5 操作系统任务调度总结
- 任务的基本概念就是把一个大型任务分解城多个
带有运行环境的小任务,然后在计算机中通过运行这些小任务,最终达到完成大任务的目的。在UCOS-II中,与上述那些小任务对应的程序实体就叫做“任务”(实际上是一个线程),UCOS-II就是一个能对这些小任务的运行管理和调度的多任务操作系统。 - 从应用程序设计的角度看,UCOS-II的任务就是一个用户编写的C函数和与之相关联的一些数据结构而构成的一个实体。

三、深入uc/os - II 高级特性
在基本的设置和任务管理之后,μC/OS-II提供了一系列高级特性,这些特性使得开发复杂的嵌入式应用成为可能。掌握这些高级特性对于充分利用μC/OS-II的潜力至关重要。
3.1 任务同步机制:
- 信号量(Semaphores):信号量是一种常用的任务同步机制。在μC/OS-II中,信号量可以用于控制对共享资源的访问,或者在任务之间同步操作。信号量通过 OSSemCreate() 创建,并通过 OSSemPend() 和 OSSemPost() 来等待和发送信号。
- 互斥量(Mutexes):互斥量是特殊类型的信号量,专门用于确保对共享资源的互斥访问。与普通信号量不同的是,互斥量提供了优先级继承的特性,防止优先级反转问题。
3.2 消息队列:
在多任务应用中,任务间的通信是一个常见需求。μC/OS-II提供了消息队列机制,允许任务以消息的形式交换数据。这些消息队列通过 OSQCreate() 创建,并通过 OSQPend() 和 OSQPost() 来接收和发送消息。
3.3 内存管理:
- μC/OS-II内置了一个简单的内存管理模块,允许动态分配和释放内存。这对于管理不同大小或生命周期的数据结构特别有用。
- 内存管理功能通过创建内存分区
OSMemCreate()和分配/释放内存块OSMemGet() 和 OSMemPut()来实现。
3.4 定时器管理:
- μC/OS-II提供了软件定时器的功能,允许在特定时间执行任务。这对于需要周期性或一次性延时执行的操作非常有用。
- 软件定时器通过
OSTmrCreate() 创建,并可以设定为一次性或周期性触发。
通过这些高级特性,μC/OS-II为开发者提供了强大的工具来处理复杂的任务调度、同步和通信问题。在下一部分中,我们将通过一个实际的项目案例来展示如何将μC/OS-II的这些特性应用到具体的单片机开发中。
四、UC/OS-II 在实际项目中的应用案例
理论知识的学习虽然重要,但在实际项目中应用μC/OS-II才能真正体会其强大的功能和灵活性。以下是一个实际应用案例,展示了如何在一个具体的单片机项目中使用μC/OS-II。
4.1 案例简介:
假设我们正在开发一个智能家居控制系统,该系统需要同时处理多个任务,如温度监控、照明控制和安全检测。在这个系统中,μC/OS-II的多任务处理能力可以帮助我们高效地管理这些不同的功能。
4.2 任务创建和管理:
- 温度监控任务:负责定期读取温度传感器的数据,并根据设定的阈值调整空调系统。
- 照明控制任务:根据环境光线强度和用户设定,自动调整室内照明。
- 安全检测任务:监控安全传感器,如烟雾报警器和门窗传感器,以及时响应潜在的安全威胁。
4.3 任务同步和通信:
使用信号量和消息队列来同步任务和传递数据。例如,温度监控任务可以通过消息队列向照明控制任务发送温度数据。
4.4 实际代码实现:
为每个任务定义一个任务函数,并在系统启动时创建这些任务。
任务函数中包含任务的具体逻辑,如读取传感器数据、执行控制指令等。
使用μC/OS-II的API来实现任务之间的同步和通信。
4.5性能优化和调试:
在开发过程中,使用μC/OS-II提供的调试工具来监控任务状态和系统性能。
根据系统运行情况调整任务优先级和堆栈大小,以优化性能。
通过这个案例,我们可以看到,μC/OS-II使得管理多任务变得简单而直观。它不仅提高了系统的可靠性和效率,还简化了复杂功能的实现。在下一部分,我们将讨论如何调试μC/OS-II应用,并提供一些性能优化的技巧。
五、调试和性能调优
在μC/OS-II应用的开发过程中,调试和性能优化是不可或缺的步骤。合理的调试策略和性能优化技巧可以显著提高应用的稳定性和效率。
5.1 调试μC/OS-II应用
-
**使用μC/OS-II的内置调试功能:**μC/OS-II提供了一系列的调试工具,如任务状态查看、堆栈使用监控等,这些工具可以帮助识别和解决问题。
-
堆栈溢出检测:为了防止堆栈溢出,可以使用μC/OS-II的堆栈检查功能。此外,合理地估算和分配每个任务的堆栈大小也是关键。
-
任务监控:通过监控任务的运行状态和性能指标,可以及时发现潜在的问题,比如任务死锁或优先级不当设置。
5.2 性能优化策略:
优化任务设计:合理分配任务优先级,避免不必要的任务切换,可以提高系统的整体性能。
**资源管理优化:**确保有效地使用信号量和消息队列等同步机制,避免资源竞争和死锁。
内存管理:合理地管理内存使用,避免内存泄漏和碎片化。
5.3 最佳实践:
定期代码审查:定期审查和重构代码可以帮助发现和修复潜在问题,提高代码质量。
系统测试:进行全面的系统测试,包括压力测试和边界条件测试,以确保系统的稳定性和可靠性。
文档和注释:保持代码的良好文档和注释,有助于调试和维护。
代码汇总
下面就使用ucosII 移植到系统中,我们让3个LED 同时闪烁
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
//#include <stdio.h>
//#include "gpio.h"
#include "stm32f10x_gpio.h"
// #include "stm32f10x.h"
#include "includes.h"
/* Private functions ---------------------------------------------------------*/
// 这里任务堆栈的大小先设定大一点,后续根据经验设置成够用就好
#define STARTUP_TASK_STK_SIZE 128
#define TASK_LED1_STK_SIZE 128
#define TASK_LED2_STK_SIZE 128
#define TASK_LED3_STK_SIZE 128
// 设置好任务的优先级 (优先级高低和数字成反比)
#define STARTUP_TASK_PRIO 7
#define TASK_LED1_PRIO 8
#define TASK_LED2_PRIO 9
#define TASK_LED3_PRIO 10
// 创建任务的堆栈空间
static OS_STK startup_task_stk[STARTUP_TASK_STK_SIZE];
static OS_STK task_led1_stk[TASK_LED1_STK_SIZE];
static OS_STK task_led2_stk[TASK_LED2_STK_SIZE];
static OS_STK task_led3_stk[TASK_LED3_STK_SIZE];
void Task_start(void *p_arg);
/**
* @brief Main program.
* @param None
* @retval None
*/
int main(void)
{
// GPIO 初始化
IOdevInit();
// 初始化串口
MX_UART_Init();
// ucosII相关函数
OS_CPU_SysTickInit(); // 系统滴答时钟初始化
OSInit();
OSTaskCreate(Task_start,NULL,&startup_task_stk[STARTUP_TASK_STK_SIZE - 1 ],STARTUP_TASK_PRIO);
OSStart();
}
void RB_Task_led1(void *p_arg);
void RB_Task_led2(void *p_arg);
void RB_Task_led3(void *p_arg);
// 起始任务
void Task_start(void *p_arg){
(void)p_arg;
// 任务创建前需要关闭系统总中断,防止创建过程被打断
OS_CPU_SR cpu_sr = 0;
OS_ENTER_CRITICAL();
OSTaskCreate(RB_Task_led1,NULL,&task_led1_stk[TASK_LED1_STK_SIZE - 1],TASK_LED1_PRIO);
OSTaskCreate(RB_Task_led2,NULL,&task_led2_stk[TASK_LED2_STK_SIZE - 1],TASK_LED2_PRIO);
OSTaskCreate(RB_Task_led3,NULL,&task_led3_stk[TASK_LED3_STK_SIZE - 1],TASK_LED3_PRIO);
// 起始任务删除
OSTaskDel(STARTUP_TASK_PRIO);
// 重启中断
OS_EXIT_CRITICAL();
}
void RB_Task_led1(void *p_arg){
(void)p_arg;
while(1){
GPIO_SetBits(LED_PORT,MCU_LED1_PIN);
printf("1\r\n");
OSTimeDlyHMSM(0,0,0,500);
GPIO_ResetBits(LED_PORT,MCU_LED1_PIN);
printf("2\r\n");
OSTimeDlyHMSM(0,0,0,500);
}
}
void RB_Task_led2(void *p_arg){
(void)p_arg;
while(1){
GPIO_SetBits(LED_PORT,MCU_LED2_PIN);
printf("3\r\n");
OSTimeDlyHMSM(0,0,0,500);
GPIO_ResetBits(LED_PORT,MCU_LED2_PIN);
printf("4\r\n");
OSTimeDlyHMSM(0,0,0,500);
}
}
void RB_Task_led3(void *p_arg){
(void)p_arg;
while(1){
GPIO_SetBits(LED_PORT,MCU_LED3_PIN);
printf("5\r\n");
OSTimeDlyHMSM(0,0,0,500);
GPIO_ResetBits(LED_PORT,MCU_LED3_PIN);
printf("6\r\n");
OSTimeDlyHMSM(0,0,0,500);
}
}
串口输出记录:
- 任务1、2、3 连续占有CPU使用权
- 根据任务优先级轮流执行,当执行到
OSTimeDlyHMSM时候,就让出cpu使用权
















 1737
1737











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









