







在过去十年中,口腔健康和卫生受到特别关注。这种趋势正在推动发明新的增强型口腔健康技术的设计师进行更多的创新。电动牙刷显著改善了刷牙体验和刷牙习惯。最流行和最有效的电动牙刷类型是旋转或左右移动的电动牙刷。由于电机,可以以声波或较低速度进行运动。
现代电动牙刷通常依靠可充电电池,当牙刷在使用之间放置在充电底座中时,通过感应充电进行充电。他们通常使用镍氢(NiMH)电池,其标称电压为1.2 V。低压GreenPAK™ SLG47513的工作电压范围为1 V至1.65 V,可控制牙刷的操作。
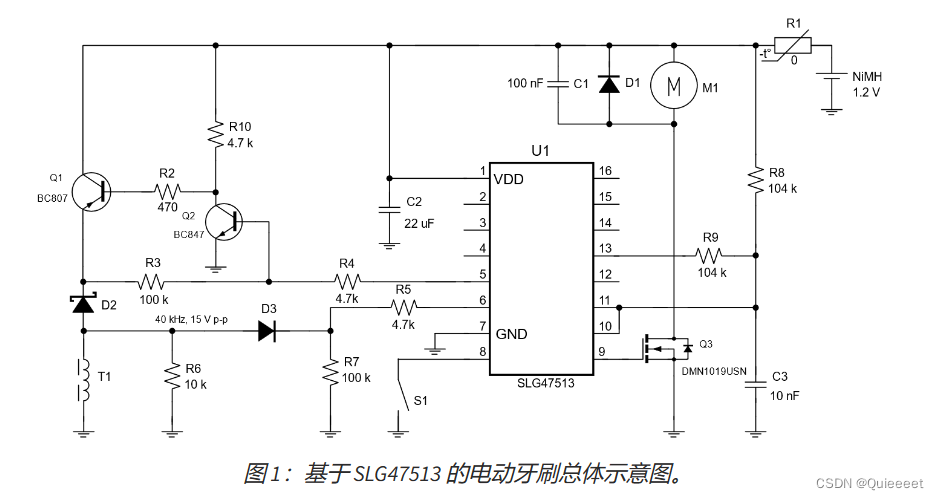
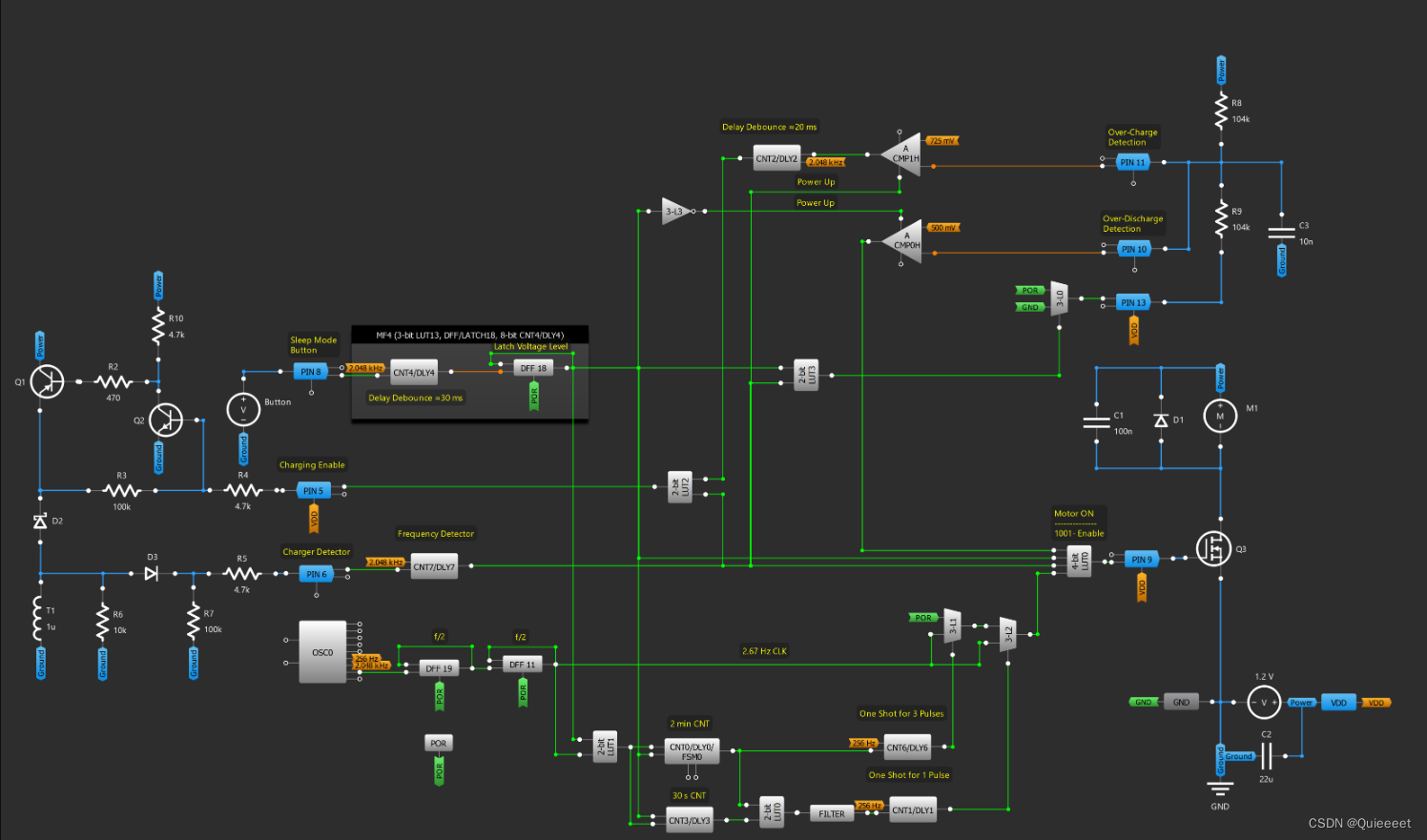
图 2 显示了 Go 配置™软件中心中电动牙刷的内部设计。完整的设计文件可以在这里找到: AN-CM-360 电动牙刷.gp6
电机控制
当牙刷处于睡眠模式时,由于上拉电阻,引脚8输出设置为高电平,但按下按钮时,会在短时间内出现低电平信号。为了滤除开关弹跳,使用延迟宏单元DLY4。DFF18 锁定电压电平并在每次按下按钮时翻转它,允许牙刷使用外部按钮在两种模式之间切换 - 工作模式和睡眠模式。
当牙刷切换到工作模式时,晶体管的栅极以及多路复用器 3-L2 的输出端存在恒定的高电压电平。该电压电平打开晶体管Q3并启动直流电机。
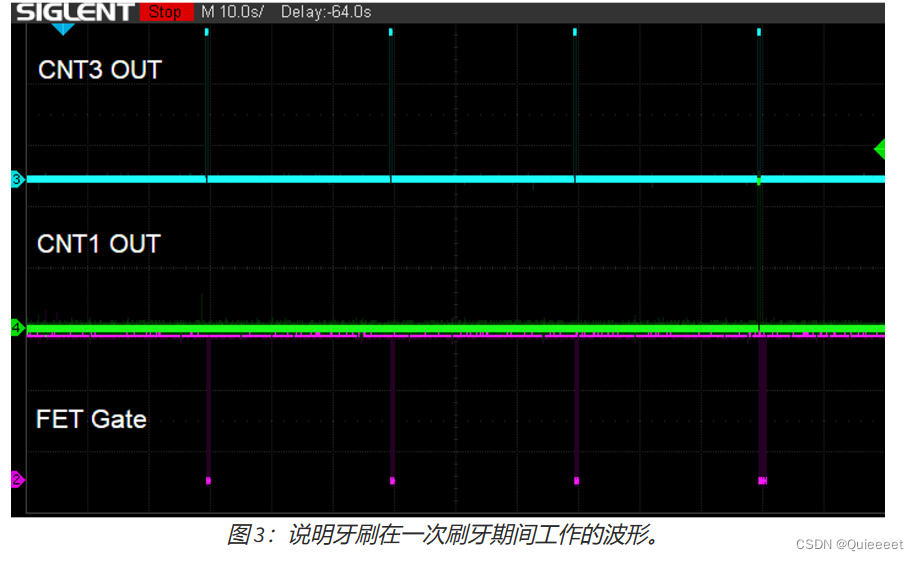
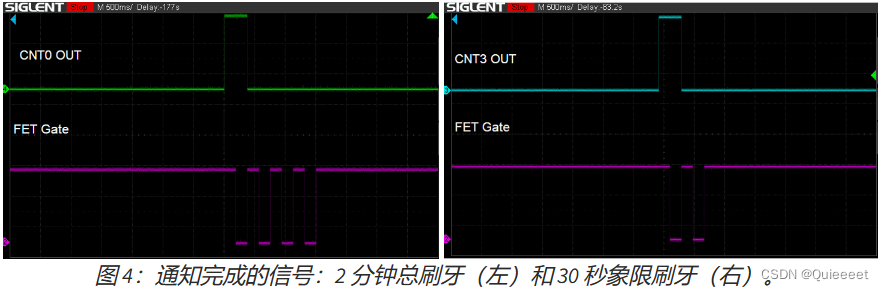
刷子有2个计时器。第一个通知用户已完成 2 分钟的刷牙会话。振荡器 OSC0、DFF19 和 DFF11 形成频率为 2.67 Hz 的时钟信号。当牙刷切换到ON模式时,2位LUT1将此时钟信号馈送到CNT0的CLK输入。两分钟后,CNT0输出端出现高电平,触发单脉冲(CNT6),形成宽度等于时钟信号三个半周期的信号脉冲。这三个脉冲通过两个多路复用器(3位LUT0和引脚9)馈送到晶体管栅极,从而馈送到电机,从而产生振动效应(参见图3和图4a)。
除了 2 分钟计时器外,这款牙刷还包含一个基于 CNT30 的 3 秒计时器,这表明需要继续刷口腔的下一个象限(四分之一)。30 秒后,CNT3 输出端出现高电平。2 位 LUT0 每 4 个脉冲滤除一次,滤波器宏单元可消除毛刺。CNT3输出信号触发单次(CNT1),形成宽度等于时钟信号一个半周期的信号脉冲(参见图3和图4b)。
为了确保每次关闭牙刷时都重新启动计时器,计数器在DFF18输出信号的上升沿复位。
数字多路复用器支持基于单脉冲输出将恒定电压、一个脉冲或三个脉冲传递到晶体管栅极。
3 位 LUT0 可防止电机在充电时运行。具体来说,只有当牙刷处于工作模式并且未放置在充电站中时,晶体管栅极上的信号才为高电平。
充电
大多数现代电动牙刷使用无线感应充电。牙刷及其底座形成一个两部分变压器,底座具有变压器的初级绕组,牙刷具有次级绕组。次级绕组上的感应电压由二极管D1整流,然后由电阻分压器降低至正确检测充电器存在所需的值(见图1)。分压器包括外部电阻R7 (100 kΩ)和R5 (4.7 kΩ),以及SLG10内部的内部下拉电阻(47513 kΩ),该电阻将引脚6上的电压峰值设置为约1.2 V。
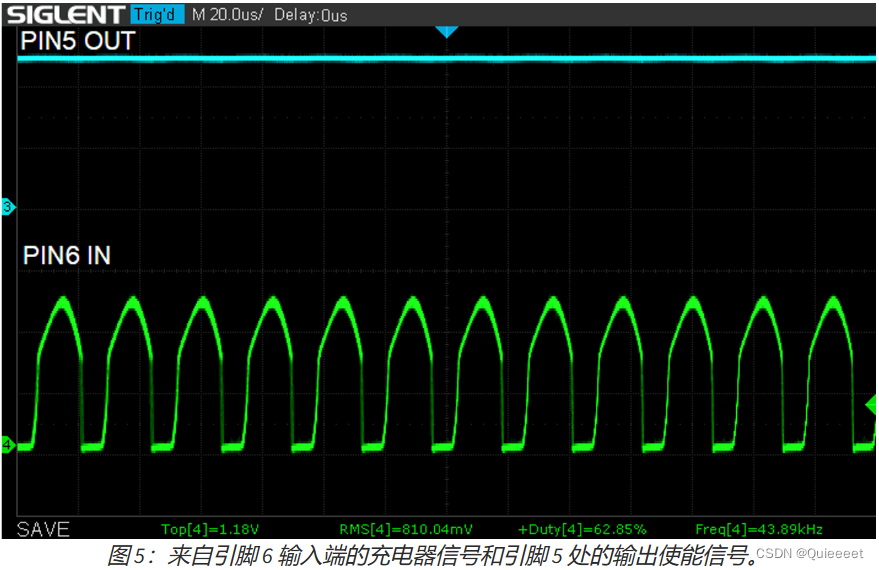
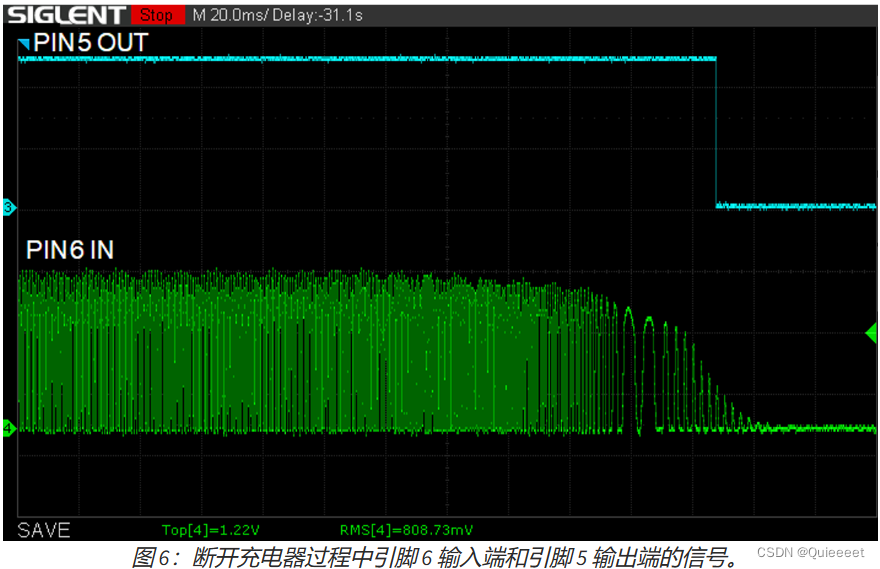
当来自充电器的信号到达用作模拟比较器的引脚6时,频率检波器的输入端会出现高电平。频率检波器在此信号上生成高电平输出,该输出进入引脚5并启用充电(参见图5和图6)。引脚5输出端的高电平信号打开Q2晶体管,Q1晶体管又打开Q<>晶体管,启动电池的充电过程。
为了防止电池过度充电,使用了模拟比较器ACMP1H。电阻R8和R9将电池电压分成两半,该电压施加于引脚11的输入端。然后通过迟滞为725 mV的比较器将其与100 mV的基准电压进行比较。如果分压器的电压达到此基准电压,则电池充电停止。使用延迟宏单元 DLY2 作为滤波器。
为了防止电池过度放电,使用了模拟比较器ACMP0H。该比较器比较分压器的相同电压,但其基准电压设置为500 mV,迟滞设置为100 mV。当测得的电压小于基准电压时,比较器输出变为低电平,晶体管闭合,防止电池过度放电。
为了防止电路通过分压器消耗多余的能量,分频器仅在电池充电或牙刷打开时连接到接地总线。这些条件由2位LUT3检查,当至少满足其中一个条件时,其输出变为高电平。基于该高电平信号的多路复用器3-L0通过Pin13的集电极开路晶体管将接地总线连接到分压器。此外,ACMP0H 仅在牙刷退出睡眠模式时通电,ACMP1H 仅在连接充电器时通电。这些措施可确保睡眠模式下的功耗极低。
结论
SLG47513 低压操作允许仅通过一个 1.2 V NiMH 电池为所提出的设备供电,该电池是电动牙刷的主要电源。SLG47513非常适合这些设备,因为它具有足够的数字和模拟宏单元,可用于控制牙刷电机并实现定时器和充电控制等附加功能。SLG47513可以作为市场上流行的电动牙刷的功能替代品。由于市场上可以由1.2 V供电并可以实现牙刷功能的集成电路并不多,因此制造商经常使用定制ASIC,这增加了牙刷的成本。GreenPAK是一种经济高效的解决方案,因为它使用现成的基座芯片,采用1.6 mm x 1.6 mm的极小外壳,有助于减少所需的电路板空间。
注:所有图片均由瑞萨电子提供。















 513
513











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











