






原文链接:https://www.yuque.com/yahei/hey-yahei/rl-q_learning
参考:
- 机器学习深度学习(李宏毅) - Q Learning
- 机器学习深度学习(李宏毅) - Q Learning Advanced Tips
- 机器学习深度学习(李宏毅) - Q Learning Continuous Action
基本形式
Q Learning是一种value-based的RL算法,value-based算法旨在训练一个Critic(记为 V π V^\pi Vπ),它与某个Actor绑定,能够根据状态 s s s(和采取的动作 a a a)预测出Actor接下来能累计获得多少奖励。
只考虑状态
首先考虑最简单的value-based算法,它只根据状态
s
s
s来预测未来的累计奖励——

如何训练这样一个Critic呢?这里列出两种常用的训练方法——
- 蒙特卡洛(Monte-Carlo, MC)
用完整的episode进行训练

- 时间差分(Temporal-Difference, TD)
用相邻两个状态的差值进行训练

这两个方法各有优劣,
- MC比较精确,
TD比较稳定 - MC的结果有较大的方差,而且如果episode很长,那么在训练时会有困难;
TD的结果方差较小,但 V π ( s t + 1 ) V^\pi(s_{t+1}) Vπ(st+1)的预测不一定准确,以其为标准来训练、更新也说不上合理 - MC会关注不同状态的相关性,
TD则不关注(都合理,但也都不完美)
举个例子,

很好理解,8个episode,无论是MC还是TD,都有 V π ( s b ) = 3 / 4 V^\pi(s_b)=3/4 Vπ(sb)=3/4;
对于 V π ( s a ) V^\pi(s_a) Vπ(sa)就比较麻烦了, V M C π ( s a ) = 0 , V T D π ( s a ) = V T D π ( s b ) + r = 3 / 4 V^\pi_{MC}(s_a)=0, V^\pi_{TD}(s_a)=V^\pi_{TD}(s_b) + r = 3/4 VMCπ(sa)=0,VTDπ(sa)=VTDπ(sb)+r=3/4,相差甚远;
那么是MC合理还是TD合理呢?其实都合理的,考虑第一个episode,- MC考量了整个episode的情况,认为是因为 s a s_a sa的出现,导致了后续的KaTeX parse error: Expected group after '_' at position 2: s_̲没能拿到奖励;
- TD则认为 s b s_b sb没能拿到奖励只不过是个巧合,并不一定是 s a s_a sa的出现带来的影响
综合状态和动作
前述的两种算法只考虑了状态
s
s
s对后续累计奖励的影响,而Q Learning在此基础上还额外考虑了采取的动作
a
a
a的影响。Q Learning有两种表现形式——

- 以状态 s s s和动作 a a a为输入,直接预测在状态 s s s下采取动作 a a a之后的累计奖励(如左图);
- 以状态 s s s为输入,预测在状态 s s s下采取不同动作 a a a之后的累计奖励(如右图),这种情况下要求可采取的动作是有限的(当然,也有一些解决方案)
对于Q Learning来说,并不需要独立的Actor,这是因为Critic应该给出了所有动作的未来累计价值,选择未来累计价值最高的一个动作即可,相当于隐含了Policy。
π
′
(
s
)
=
arg
max
a
Q
π
(
s
,
a
)
\pi^{\prime}(s)=\arg \max _{a} Q^{\pi}(s, a)
π′(s)=argamaxQπ(s,a)
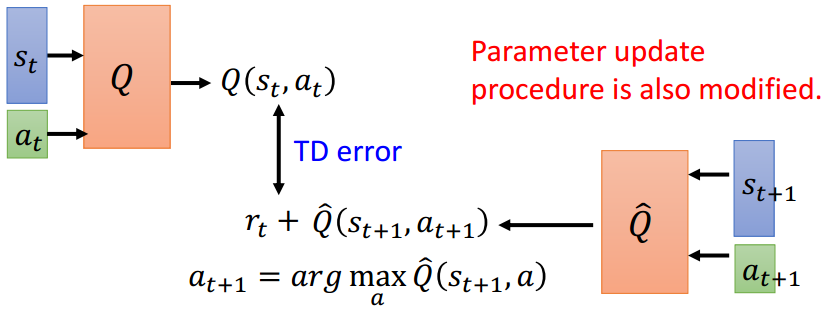
训练过程可以用下图概括,以最大化Q为目标,用TD或MC算法迭代训练——
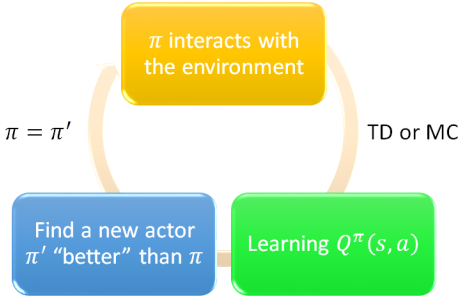
(Q Learning训练过程示意)
如果Q Learning跟深度学习结合起来,那么就称为Deep Q-learning Network, DQN。
三点改进
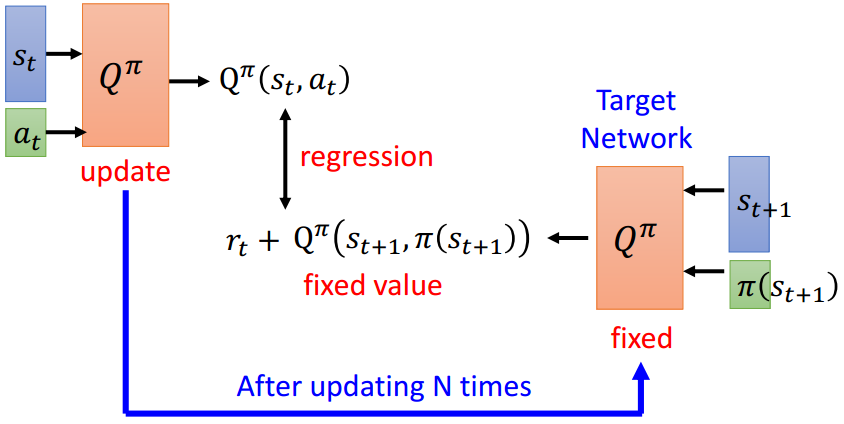
在使用TD算法训练Q Learning模型时,存在一个问题,如果频繁对产生目标
Q
π
(
s
t
+
1
,
π
(
s
t
+
1
)
)
Q^\pi\left(s_{t+1}, \pi(s_{t+1})\right)
Qπ(st+1,π(st+1))的模型
π
\pi
π进行更新,使得回归出来的
Q
π
(
s
t
,
a
t
)
Q^\pi\left(s_t, a_t\right)
Qπ(st,at)逼近
r
t
+
Q
π
(
s
t
+
1
,
π
(
s
t
+
1
)
)
r_{t}+\mathrm{Q}^{\pi}\left(s_{t+1}, \pi\left(s_{t+1}\right)\right)
rt+Qπ(st+1,π(st+1)),那么训练过程很容易不稳定(因为对于同样的状态和动作,目标却一直在发生变化)。
因此可以引入一个独立的目标网络(Target Network),被训练的网络每迭代一定步数之后再将权重应用到目标网络上去,以此产生相对稳定的目标,使得训练过程变为稳定。
与policy-based算法一样,Q Learning也面临着探索(Exploration)的问题,为了避免 Q π Q^\pi Qπ对于某个状态 s s s倾向于对某个动作 a a a产生更大的Q值,需要采取一些措施来鼓励网络对其他动作进行探索。比如,
- Epsilon Greedy
以一定概率随机挑选动作而非选取Q值最大的动作,通常训练早期倾向于探索,后期能产生比较准确而稳定Q值之后转而更多依靠已学的知识。所以会在训练初期使用一个较大的 ϵ \epsilon ϵ,随着训练过程的推进逐渐衰减
a = { arg max a Q ( s , a ) , with probability 1 − ε random, otherwise a=\left\{\begin{array}{cc} \arg \max _{a} Q(s, a), & \text { with probability } 1-\varepsilon \\ \text { random, } & \text { otherwise } \end{array}\right. a={argmaxaQ(s,a), random, with probability 1−ε otherwise - Boltzmann Exploration
模仿softmax为不同动作的Q值进行规范化,产生一个概率分布,按概率随机抽取所要执行的动作
P ( a ∣ s ) = exp ( Q ( s , a ) ) ∑ a exp ( Q ( s , a ) ) P(a | s)=\frac{\exp (Q(s, a))}{\sum_{a} \exp (Q(s, a))} P(a∣s)=∑aexp(Q(s,a))exp(Q(s,a))
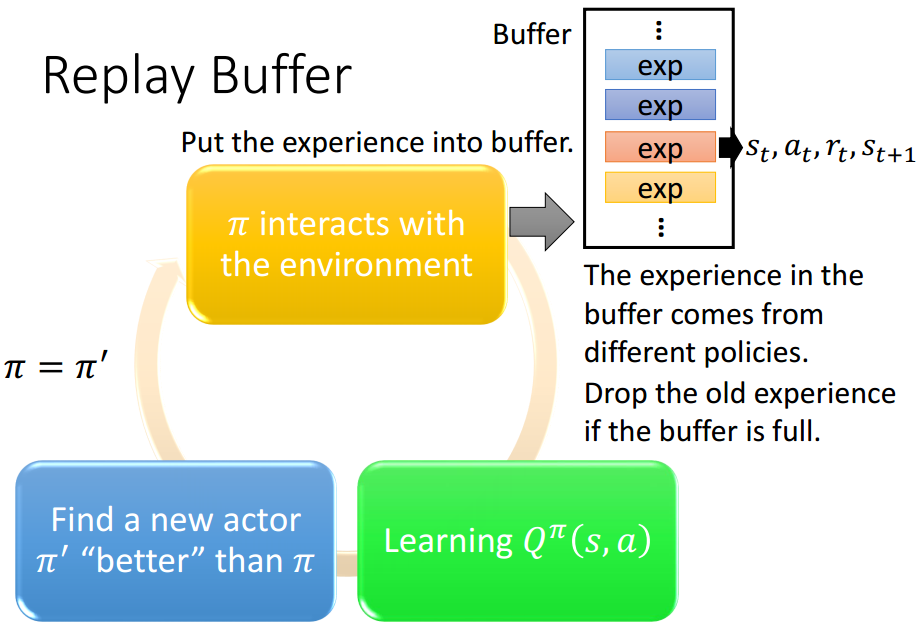
每次交互结果都只用来训练一次似乎有些浪费,可以用一个缓冲区(Replay Buffer)来记录早前的交互状况
(
s
t
,
a
t
,
r
t
,
s
t
+
1
)
(s_t, a_t, r_t, s_{t+1})
(st,at,rt,st+1),每次从缓冲区中随机抽取一些经历构成batch来进行训练。虽然这些经历来自于不同的policies,甚至可能是差异比较大的policies,但考虑到状态、动作、奖励、下一个状态是客观存在的,跟policies本身无关,所以影响并不大。这种方法通常称为经验回放(Experience Replay)。
DQN的一些进展
Double DQN
论文:
Q
(
s
t
,
a
t
)
⟷
r
t
+
max
a
Q
(
s
t
+
1
,
a
)
Q\left(s_{t}, a_{t}\right) \longleftrightarrow r_{t}+\max _{a} Q\left(s_{t+1}, a\right)
Q(st,at)⟷rt+amaxQ(st+1,a)
观察Q Learning的目标,可以发现
max
a
Q
(
s
t
+
1
,
a
)
\max _{a} Q\left(s_{t+1}, a\right)
amaxQ(st+1,a)很容易被高估,从而导致整个目标被高估,恶性循环,Q值会存在一直被高估的现象。
为了解决这一问题,可以引入一个新的DQN(公式中的
Q
′
Q'
Q′),用于独立地估计下一个state的Q值,
Q
(
s
t
,
a
t
)
⟷
r
t
+
Q
′
(
s
t
+
1
,
arg
max
a
Q
(
s
t
+
1
,
a
)
)
Q\left(s_{t}, a_{t}\right) \longleftrightarrow r_{t}+Q^{\prime}\left(s_{t+1}, \arg \max _{a} Q\left(s_{t+1}, a\right)\right)
Q(st,at)⟷rt+Q′(st+1,argamaxQ(st+1,a))
其实就是个冗余设计,两个DQN之间互相监督,减少高估情况的发生,
- 如果 Q Q Q可能出现高估,那么 Q ′ Q' Q′会重新估计一个相对准确的Q值
- 如果 Q ′ Q' Q′可能出现高估,那么 Q Q Q也有可能不采取会被高估的那个action
- Q Q Q和 Q ′ Q' Q′同时高估的可能性就远低于单一个 Q Q Q高估的可能性
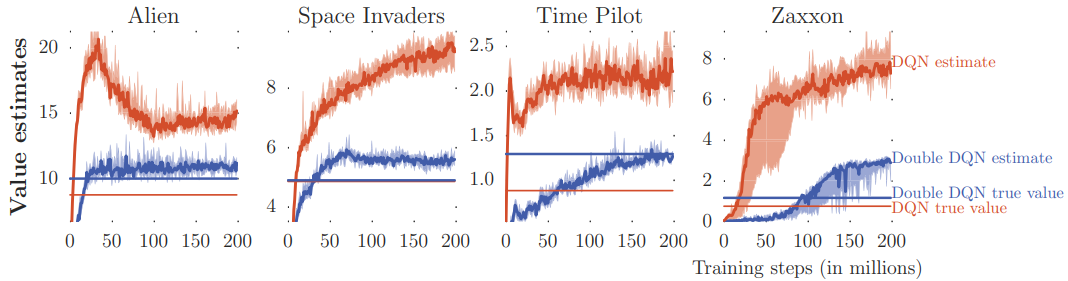
(Double DQN的效果)
Dueling DQN
论文:《Dueling Network Architectures for Deep Reinforcement Learning (2015)》
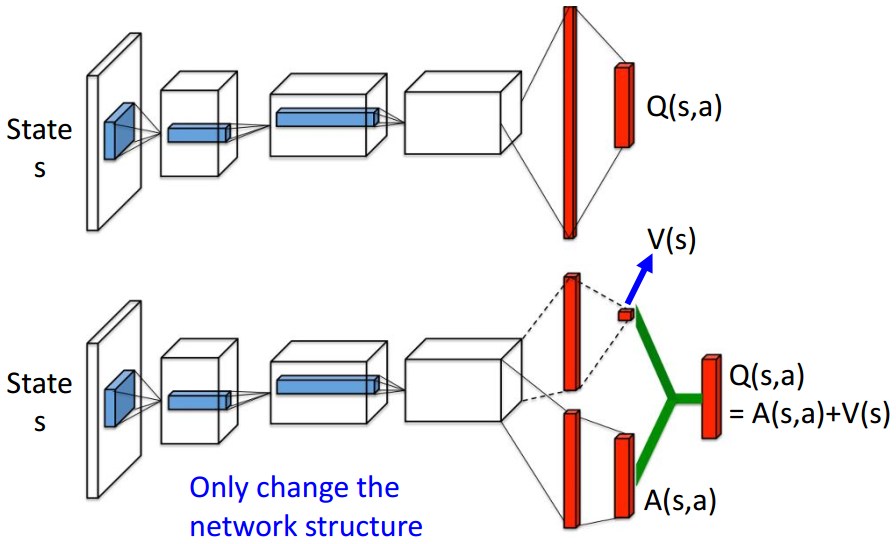
(上:DQN; 下:Dueling DQN)
Dueling DQN不再直接输出Q值,而是由两个子分支分别输出state的Q值、在该state下各个action的Q值增量,最后广播相加得到在该state下各个action的实际Q值。
Q
(
s
,
a
)
=
A
(
s
,
a
)
+
V
(
s
)
Q(s, a) = A(s, a) + V(s)
Q(s,a)=A(s,a)+V(s)
通常会约束
∑
A
(
s
,
a
i
)
=
0
\sum A(s, a_i) = 0
∑A(s,ai)=0,该约束在实现上也非常简单,直接对分支的输出做去均值的处理,然后再进行
Q
(
s
,
a
)
Q(s, a)
Q(s,a)的计算就行。该约束使得
V
(
s
)
V(s)
V(s)输出恰好为
Q
(
s
,
a
)
Q(s,a)
Q(s,a)的均值,在训练过程中即使某些action没有在episode中出现,Dueling DQN也有可能倾向于更新均值
V
(
s
)
V(s)
V(s),此时这些没有出现的action的Q值也会随之更新。
Prioritized Replay
论文:《Prioritized Experience Replay (ICLR2016)》
为Experience Buffer加一个优先级,增加对以往TD误差较大的样本的抽样概率。
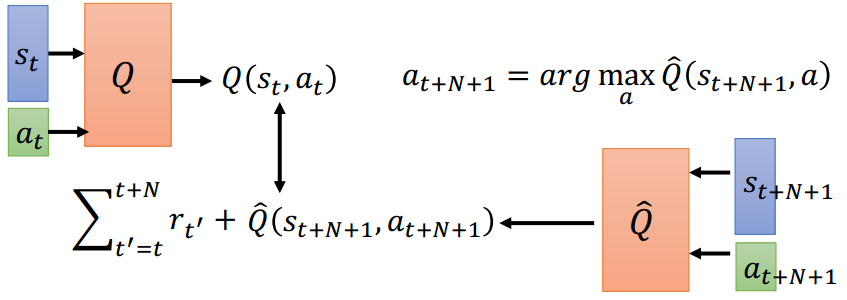
Multi-step
MC和TD的一个折中版本,MC考虑整个episode,TD只考虑相邻的两次决策,Multi-step则考虑连续的N次决策。
Noisy Net
论文:(两篇论文主体思路一致,只是加噪方式有点差别)
之前讲过Epsilon Greedy的随机采取action的技巧,但论文认为这种Exploration不太合理,这种情况下面对同一个state很可能采取不同的action,这在实际中就不应该存在的,有可能会让模型点歪了技能树,从此越走越远(虽然在这条技术路线上可能还是会逐步提升,但并不能达到最理想的效果);因此提出,对参数进行加噪要比对action进行加噪更加合理。
Q
(
s
,
a
)
→
Add Noise
Q
~
(
s
,
a
)
a
=
arg
max
a
Q
~
(
s
,
a
)
Q(s, a) \xrightarrow{\text{Add Noise}} \tilde{Q}(s, a) \\ a=\arg \max _{a} \tilde{Q}(s, a)
Q(s,a)Add NoiseQ~(s,a)a=argamaxQ~(s,a)
加噪的方式有很多,比如最简单的给一个高斯噪声;
另外,在同一个episode中,噪声应当保持一致
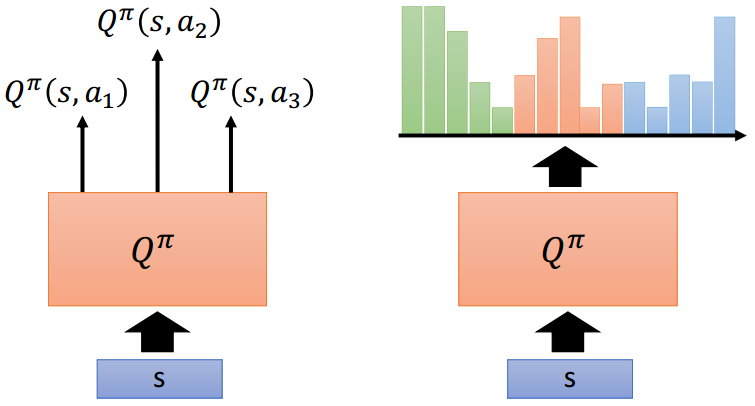
Distributional Q-function
让
Q
π
Q^\pi
Qπ不再简单输出一个scalar,而是输出一个信息更加丰富的分布。
比如将原本的3输出神经网络,改为15输出的神经网络,每五个一组作为action的Q值分布(相当于一个5bins的直方图)。
Rainbow实验探究
论文:《Rainbow: Combining Improvements in Deep Reinforcement Learning (AAAI2018)》
对前述的技术进行一系列的实验比较,来说明他们的有效性。
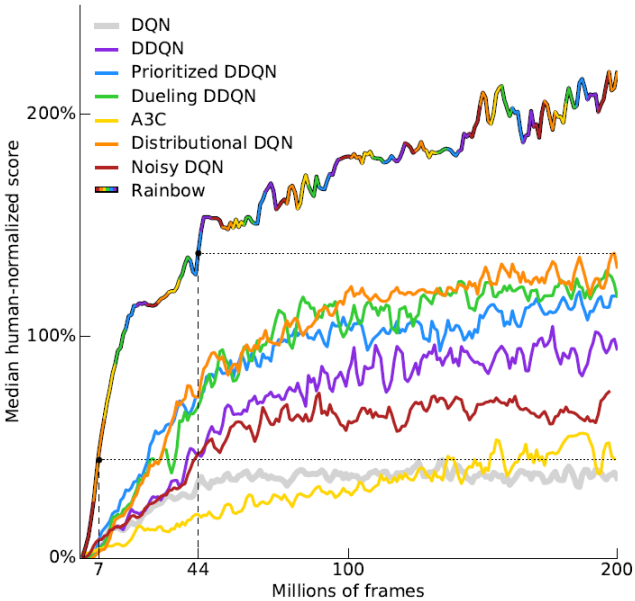
(单一技巧与Rainbow的比较)
(注意Multi-step技巧其实是A3C的一部分)
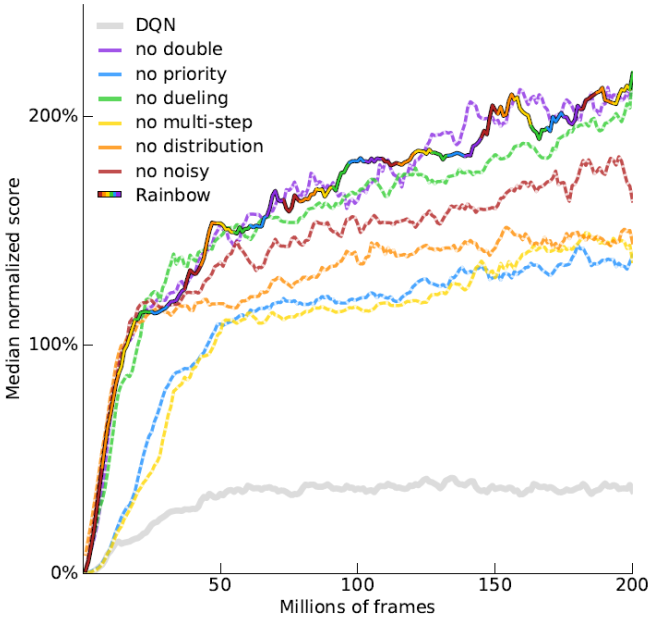
(Ablation studies)
值得注意的是,从图中我们看到即使去掉double技术,对rainbow似乎没有什么影响,论文中给出的解释是,distribution已经很好的解决了Q值高估的问题,所以double就显得不那么必要了。
处理非离散的动作
Q Learning通常只能处理离散的、可穷举的action,但现实世界中有很多非离散的情况,比如自动驾驶的汽车应该转过几度,或者控制机械手的舵机应当转过几度等等。
为了让Q Learning可以处理非离散的动作,有以下一些处理的方法:
- 对非离散的动作进行采样
比如转向0-90°,离散成 { 0 , 10 ° , 20 ° , 30 ° , 40 ° , 50 ° , 60 ° , 70 ° , 80 ° , 90 ° } \{ 0, 10°,20°,30°,40°,50°,60°,70°,80°,90° \} {0,10°,20°,30°,40°,50°,60°,70°,80°,90°}的动作选项;
(是不是也可以不暴力离散化,而是转换以原始值为均值的正态分布呢?) - 用梯度上升法更新动作
a
a
a
但训练起来非常麻烦,你除了需要优化 Q π Q^\pi Qπ,还得花功夫去优化 a a a本身,而且还不容易找到全局最优的情况 - 改造
Q
π
Q^\pi
Qπ的输出,使其隐含动作
a
a
a,比如

Q ( s , a ) = − ( a − μ ( s ) ) T Σ ( s ) ( a − μ ( s ) ) + V ( s ) Q(s, a) = -\left( a - \mu(s) \right)^T \Sigma(s) \left( a - \mu(s) \right) + V(s) Q(s,a)=−(a−μ(s))TΣ(s)(a−μ(s))+V(s)
这里 a a a是一个vector,由于有 ( a − μ ( s ) ) T Σ ( s ) ( a − μ ( s ) ) > 0 \left( a - \mu(s) \right)^T \Sigma(s) \left( a - \mu(s) \right) > 0 (a−μ(s))TΣ(s)(a−μ(s))>0(噫?为啥??),那么实际上取 a = μ ( s ) a=\mu(s) a=μ(s)即可以使Q值最大化。具体在训练过程中会用到一些trick,比如如何保证 Σ ( s ) \Sigma(s) Σ(s)为正定矩阵等等,此处也就不再赘述















 802
802

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









