







 本文介绍了SFM(Structure from Motion)算法,包括算法简介和详细步骤,重点解析了如何从特征检测与匹配到实现三维重建的过程。
本文介绍了SFM(Structure from Motion)算法,包括算法简介和详细步骤,重点解析了如何从特征检测与匹配到实现三维重建的过程。
SFM算法流程
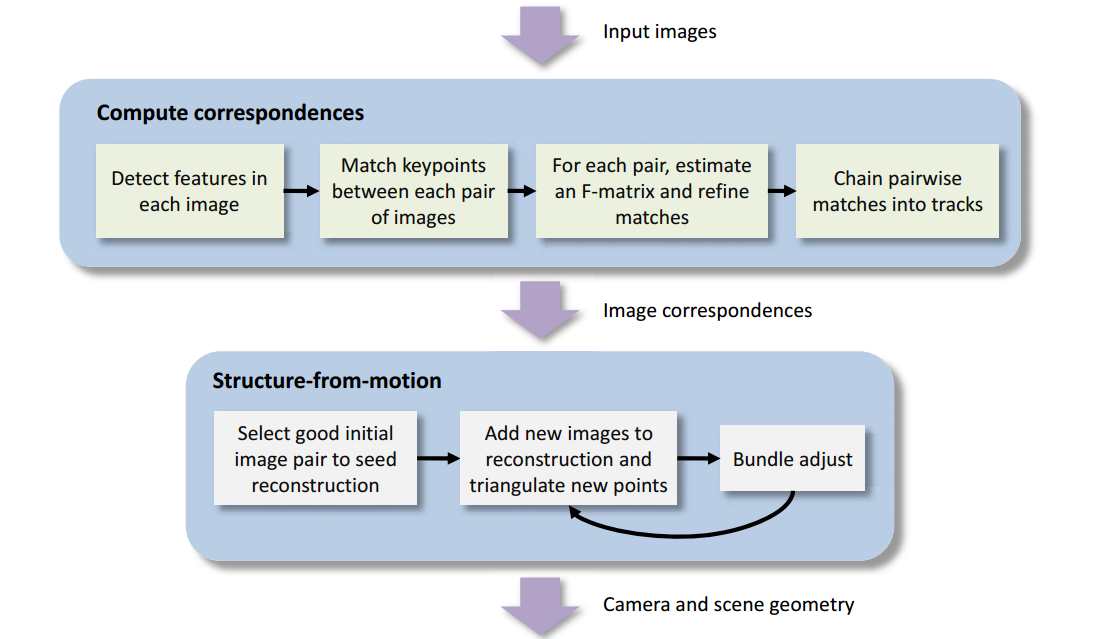
Figure1:Block diagram of structure from motion
1. 算法简介
SFM算法是一种基于各种收集到的无序图片进行三维重建的离线算法。在进行核心的算法structure-from-motion之前需要一些准备工作,挑选出合适的图片。
首先从图片中提取焦距信息(之后初始化BA需要),然后利用SIFT等特征提取算法去提取图像特征,用kd-tree模型去计算两张图片特征点之间的欧式距离进行特征点的匹配,从而找到特征点匹配个数达到要求的图像对。对于每一个图像匹配对,计算对极几何,估计F矩阵并通过ransac算法优化改善匹配对。这样子如果有特征点可以在这样的匹配对中链式地传递下去,一直被检测到,那么就可以形成轨迹。之后进入structure-from-motion部分,关键的第一步就是选择好的图像对去初始化整个BA过程。首先对初始化选择的两幅图片进行第一次BA,然后循环添加新的图片进行新的BA,最后直到没有可以继续添加的合适的图片,BA结束。得到相机估计参数和场景几何信息,即稀疏的3D点云。其中两幅图片之间的bundle adjust用的是稀疏光束平差法sba软件包,这是一种非线性最小二乘的优化目标函数算法。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1693
1693

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









