







 本文介绍了一种基于激光雷达的定位算法在FPGA上的实现过程。该算法通过计算标记点的全局坐标与局部坐标来确定探测器在全球坐标系中的位置。文章详细推导了定位计算所需的数学公式,并将其转化为矩阵运算形式。
本文介绍了一种基于激光雷达的定位算法在FPGA上的实现过程。该算法通过计算标记点的全局坐标与局部坐标来确定探测器在全球坐标系中的位置。文章详细推导了定位计算所需的数学公式,并将其转化为矩阵运算形式。
1、前言
关于算法在FPGA中的实现,本次利用业余的时间推出一个系列章节,专门记录从算法的远离推导、公式计算、Matlab的实现、Matlab定点化仿真、FPGA算法模块系统设计、FPGA算法模块代码开发与仿真、FPGA算法计算结果与Matlab定点化结果对比、上板调试等,在此做一下相关的记录和总结,做到温故知新。
2、激光雷达定位原理
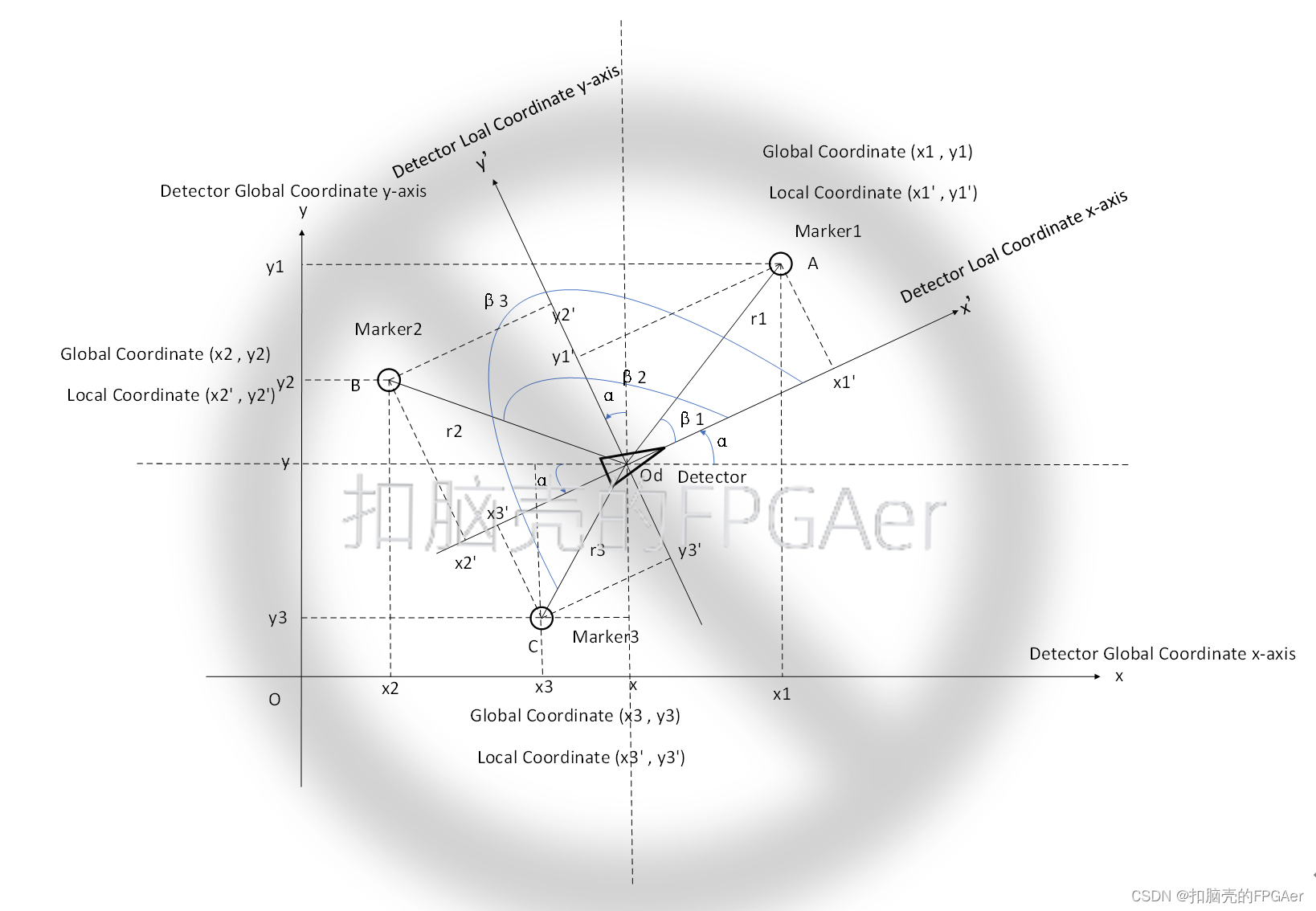
这里以Detector在Global Coordinate System(原点为O)中运动为背景,Detector本身有运动的正方向,因此可以以Detector Od为原点组成Local Coordianate System;
系统中的Markers,提前设计好它们在Global Coordinate System中的global coordinate(xi , yi),Detector可以实时探测到Markers在Local Coordiante System中的local coordinate(xi' , yi'),通过Markers的global coordinate和local coordinate实时动态的计算出Detector的global coordinate,完成Detector在Global Coordinate System中的定位功能。注意,Global Coordinate System的原点为(0 , 0),Local Coordiante System的原点为Detector的位置,它在Global Coordiante System的global coordinate为(x , y),如下图所示:
3、原理公式推导
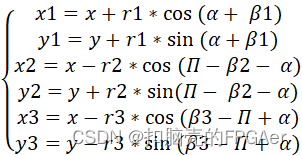
下面推导下相关公式:
公式化简:
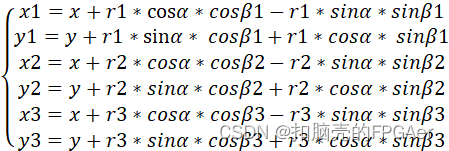
进一步化简:
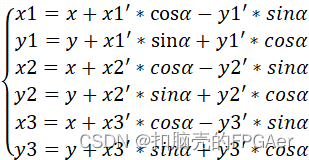
转化为矩阵乘法:
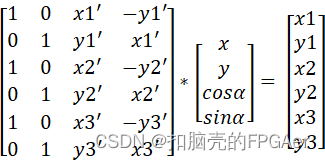
我们要计算x和y,其他的都可以看成是常量,因此可以看成是如下矩阵运算:
![]()
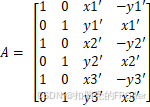
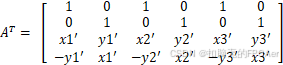
那么我们需要对A矩阵做转置和求逆运算:
![]()
其中


最后将激光雷达的全局坐标和角度信息矩阵X化简为:
![]()
4、总结
定位算法原理公式的推导设计线性代数相关的基础知识,需要提前进行准备。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











