







 本文详细介绍了海康机器人图像采集卡的安装步骤,包括硬件配置需求和MVS软件安装。同时,针对软件使用,阐述了如何枚举相机和取流。在二次开发部分,对比了基于工业相机SDK和采集卡SDK的两种方法,强调了各自的优势和适用场景,并提供了代码示例。特别指出,基于工业相机SDK开发简单,而采集卡SDK则能全面控制采集卡参数。
本文详细介绍了海康机器人图像采集卡的安装步骤,包括硬件配置需求和MVS软件安装。同时,针对软件使用,阐述了如何枚举相机和取流。在二次开发部分,对比了基于工业相机SDK和采集卡SDK的两种方法,强调了各自的优势和适用场景,并提供了代码示例。特别指出,基于工业相机SDK开发简单,而采集卡SDK则能全面控制采集卡参数。
海康机器人图像采集卡安装与使用
本文适用范围,包括海康CoaXPress:GX1004,Gige采集卡:GE1004,Cameralink:GC1002,操作方法,大同小异
1.安装环境要求
1.1主板硬件配置需求

图为:cxp采集卡
工控机:主板需支持PCIE Gen2 x8,内存8GB及其以上
操作系统:windows7 /10 64bits
(暂不支持linux等其他操作系统)
1.2软件安装
1.2.1 MVS软件安装
驱动下载安装:可以到海康机器人官网下载MVS安装
如有其他版本mvs,建议卸载后重新安装!
如装过MVFG等软件,建议卸载,MVFG已淘汰
默认安装后,安装成功后打开设备管理器,出现采集卡设备即表明安装完成,如下图所示:

图为CXP采集卡
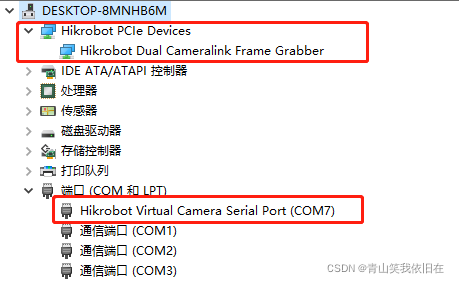
图为CML采集卡
2.软件使用
2.1枚举相机,取流
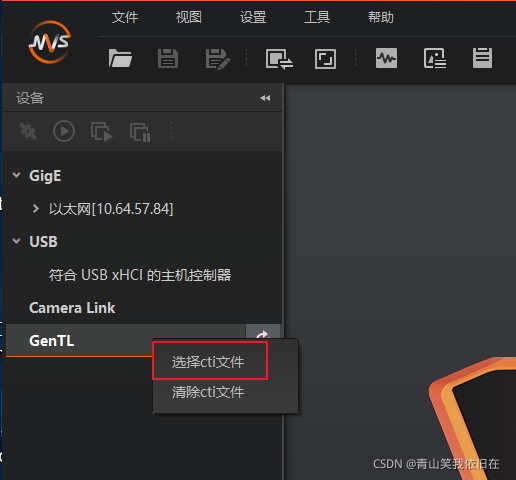
打开MVS软件,右键点击客户端中的【GenTL】并点击“选择cti文件”
路径中选择对应CTI路径:*C:\Program Files (x86)\Common Files\MVS\Runtime\Win64_x64*
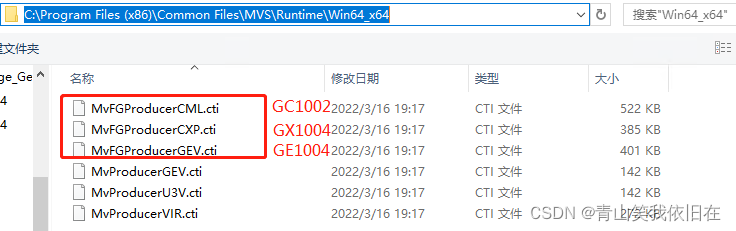
选择“MvFGProducerCML.cti“文件后,在MVS客户端刷新GenTL后就可以枚举到采集卡
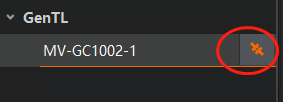
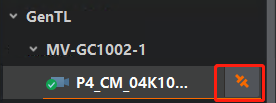
点击采集卡列表右侧链接按钮,打开采集卡,出现采集卡相关参数,以及当前采集卡下面的相机
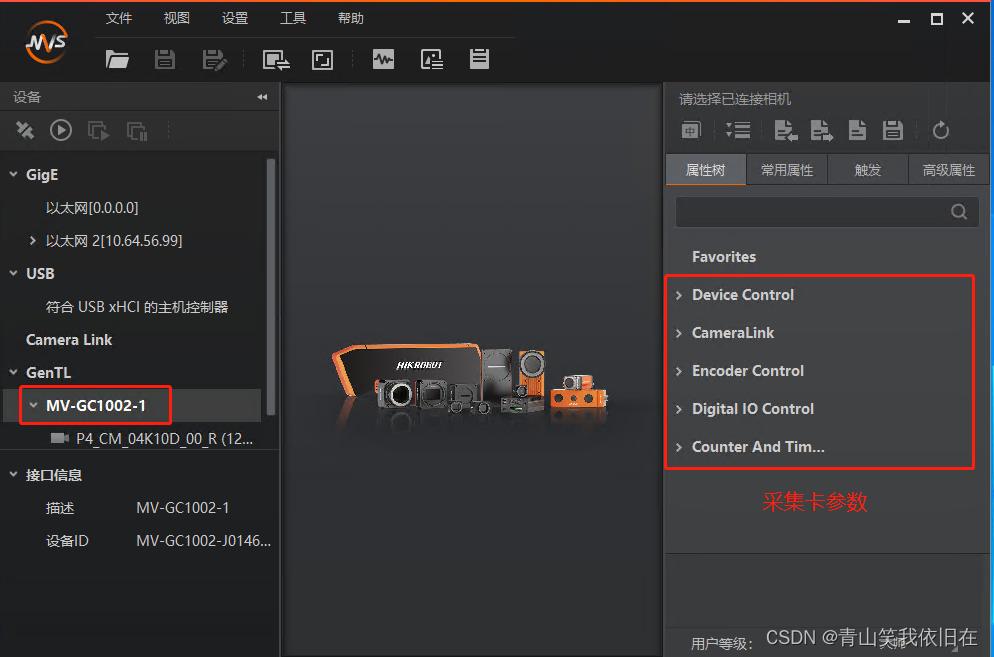
点击相机列表右侧链接按钮,即可链接打开相机
3.软件SDK二次开发
海康自研采集卡二次开发的有两种开发方式,各有优缺点
3.1基于工业相机SDK,通过GenTL进行二次开发(GIGE采集卡推荐,CXP卡也能使用)
CXP开发:
优点:
1.工业相机sdk开发简单,开发节奏快,基于工业网口相机代码,改动量超级小(改动量不超过10行)
2.其他品牌的CXP采集卡,如MIL rapxio系列、kaya,eursys采集卡也可参考BasicDemoByGenTL示例程序进行开发,代码兼容性好
缺点: 暂时无法配置采集卡相关参数,例如通过采集卡触发相机使用不方便(软触发相机,连续出流无此缺点,gige卡无此缺点)
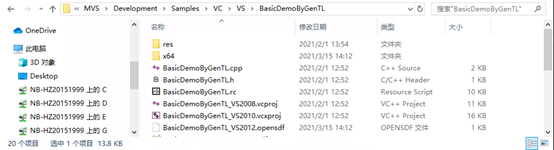
参考工业相机例程BasicDemoByGenTL,
例程路径:“C:\Program Files (x86)\MVS\Development\Samples\VC\VS\BasicDemoByGenTL”
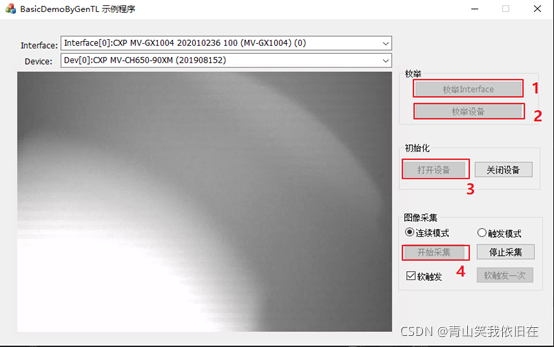
基于Gentl枚举卡,枚举相机代码
MV_GENTL_IF_INFO_LIST m_stIFInfoList;
memset(&m_stIFInfoList, 0, sizeof(MV_GENTL_IF_INFO_LIST));
MV_GENTL_DEV_INFO_LIST m_stDeviceList;
memset(&m_stDeviceList, 0, sizeof(MV_GENTL_DEV_INFO_LIST));
// ch:基于GenTL枚举Interface | en:Enum Interface Based On GenTL
nRet = MV_CC_EnumInterfacesByGenTL(&m_stIFInfoList, "C:/Program Files/KAYA Instruments/Common/bin/KYFGLibGenTL_vc141.cti");
if (MV_OK != nRet)
{
printf("Enum InterfacesByGenTL fail! nRet [0x%x]\n", nRet);
}
if (m_stIFInfoList.nInterfaceNum == 0)
{
printf("nInterfaceNum 0\n");
}
for (unsigned int i = 0; i < m_stIFInfoList.nInterfaceNum; i++)//打印枚举到的采集卡
{
char strUserName[256];
MV_GENTL_IF_INFO* pstIFInfo = m_stIFInfoList.pIFInfo[i];
sprintf_s(strUserName, "Interface[%d]:%s %s (%s) (%d)", i, pstIFInfo->chTLType, pstIFInfo->chInterfaceID, pstIFInfo->chDisplayName, pstIFInfo->nCtiIndex);
printf("strUserName:%s\n", strUserName);
}
// ch:枚举板卡
nRet = MV_CC_EnumDevicesByGenTL(m_stIFInfoList.pIFInfo[0], &m_stDeviceList);
if (MV_OK != nRet)
{
printf("Enum DevicesByGenTL fail! nRet [0x%x]\n", nRet);
}
if (m_stDeviceList.nDeviceNum == 0)
{
printf("nDeviceNum 0\n");
}
// ch:选择设备并创建句柄 | en:Select device and create handle
int index = 0;
nRet = MV_CC_CreateHandleByGenTL(&handle, m_stDeviceList.pDeviceInfo[index]);
if (MV_OK != nRet)
{
printf("Create Handle fail! nRet [0x%x]\n", nRet);
}
// ch:打开设备 | en:Open device
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet)
{
printf("Open Device fail! nRet [0x%x]\n", nRet);
}
基于工业相机SDK枚举相机
// ch:枚举设备 | Enum device
MV_CC_DEVICE_INFO_LIST stDeviceList;
memset(&stDeviceList, 0, sizeof(MV_CC_DEVICE_INFO_LIST));
nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &stDeviceList);
if (MV_OK != nRet)
{
printf("Enum Devices fail! nRet [0x%x]\n", nRet);
}
if (stDeviceList.nDeviceNum > 0)
{
for (unsigned int i = 0; i < stDeviceList.nDeviceNum; i++)
{
printf("[device %d]:\n", i);
MV_CC_DEVICE_INFO* pDeviceInfo = stDeviceList.pDeviceInfo[i];
if (NULL == pDeviceInfo)
{
break;
}
PrintDeviceInfo(pDeviceInfo);
}
}
else
{
printf("Find No Devices!\n");
break;
}
printf("Please Input camera index(0-%d):", stDeviceList.nDeviceNum-1);
unsigned int nIndex = 0;
scanf_s("%d", &nIndex);
if (nIndex >= stDeviceList.nDeviceNum)
{
printf("Input error!\n");
}
// ch:选择设备并创建句柄 | Select device and create handle
nRet = MV_CC_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);
if (MV_OK != nRet)
{
printf("Create Handle fail! nRet [0x%x]\n", nRet);
}
// ch:打开设备 | Open device
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet)
{
printf("Open Device fail! nRet [0x%x]\n", nRet);
}
可以对比上面两段代码,在相机打开前,仅少量接口存在差异性,opendevice之后,相机操作,图像获取完全一致,代码开发量较少
3.2 基于采集卡SDK进行二次开发
优点: 能够完全访问控制采集卡所有参数,使用采集卡所有功能
缺点:
1.从0开发,全新理解sdk接口,开发量有点大
2.接口仅能兼容海康采集卡,其他品牌采集卡无法兼容

采集卡接口调用框架图,白色区域为采集卡相关接口,浅蓝色区域为相机相关接口,浅红色区域为流相关接口,浅绿色为缓存相关接口,绿色区域为用户自定义操作
示例程序路径:C:\Program Files (x86)\MVS\Development\MVFG

















 715
715

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









