






一、数据包格式
VLP-16输出两种类型的UDP以太网包:数据包和位置包。数据包由激光返回值、校准反射率值、方位角值、时间戳和指示传感器型号和回波模式(最强、最后和双)的两个工厂字节组成。数据包长1248字节,在端口2368上发送。
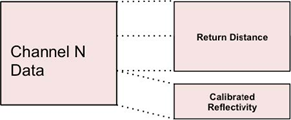
每个VLP-16数据包由一个42字节的报头和一个1206字节的有效数据组成,其中包含12个100字节数据记录块。数据后跟一个四字节的时间戳数据和两个工厂字节,首先传输最低有效字节。

如上图所示,共有12个数据块,每个数据块有2次扫描数据,即共有24个点云。
二、数据块解析

1.1 起始标识符
以0xFF,0xEE作为起始标识符
1.2 角度值
1.2.1 数据块N、N+2、…、N+22给出的角度值
(1)获得角度值:0x33 & 0x71
(2)反转字节:0x71 & 0x33
(3)组合字节:0x7133
(4)转成十进制:28979
(5)除以100
(6)结果:289.79°
1.2.2 数据块N+1、N+3、…、N+23未给出的角度值
方位插值:第一组16次点火(数据块1)和第三组16次激光点火(数据块2)的第一次点火之间的时间约为110.6μs。如果你假设短时间间隔内的旋转速度是恒定的,你可以假设(N+1)组16次激光发射的方位角在第N组16次激光发射报告的方位角和(N+2)组激光发射报告的方位角之间的一半。下面是执行插值的伪代码。代码检查方位角是否从359.99°翻转到0°在点火装置N和N+2之间。
(1)首先,调整翻转从359.99°到0°
If (Azimuth[3] < Azimuth[1])
Then Azimuth[3]:= Azimuth[3]+360;
Endif
(2)进行插值
Azimuth[2]:=Azimuth[1]+((Azimuth[3]-Azimuth[1])/2);
(3)正确的角度值范围是0°到359.99°
If (Azimuth[2]>360)
Then Azimuth[2]:= Azimuth[2]-360;
Endif
1.3 距离值
(1)获得距离值:0x89 & 0x59
(2)反转字节:0x59 & 0x89
(3)组合字节:0x5989
(4)转成十进制:22921
(5)乘以2.0mm
(6)结果:45842mm
(7)距离目标:45.842米
1.4 反射率
反射率为0x00

1.5 时间戳
(1)获取时间戳值:0x61,0x67,0xB9,0x5A
(2)反转字节:0x5A,0xB9,0x67,0x61
(3)组合字节:0x5AB96761
(4)转成十进制:1522100065
(5)除以1000000:(获取的十进制为微秒)
(6)结果:一小时后1522.100065秒
(7)如果有需要除以60获得一小时后的分钟数
1.6 工厂字节
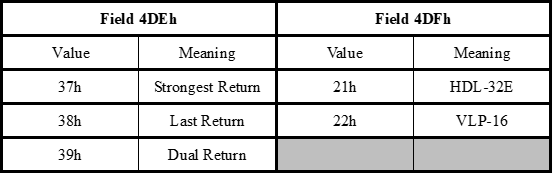
0x39表示:双回波模式
0x22表示:VLP-16
三、坐标转换
Vlp-16以球面坐标(r,ω,α)报告坐标。因此,需要进行转换才能转换为XYZ坐标。垂直/仰角(ω)是固定的,由激光器ID给出。数据包中的回波位置指示激光器ID。水平角度/方位角(α)在每隔一个发射序列的开头报告,距离以两个距离字节报告。利用该信息,可以计算每个测量点的X、Y、Z坐标。距离小于一米的点应忽略。

利用上述的角度值(α)、距离值(R)、仰角(ω)即可得到XYZ坐标下的点坐标信息。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









