







课堂小结
这节课首先对Hog算法进行了补充,然后小组分别详细展示了SIFT算法、SURF算法和距离度量方法。
1. Hog算法补充
在进行特征计算之前先要对图片进行预处理,使得行列的像素个数(m, n)能被cell的边长(设为8)整除。每个cell feature的个数为9,那每个Block的feature为4*9=36,那整个图片的feature个数为:(m/8-1)*(n/8-1)*36
2. SIFT(尺度不变特征变换匹配算法)
sift算法的大致流程如下:
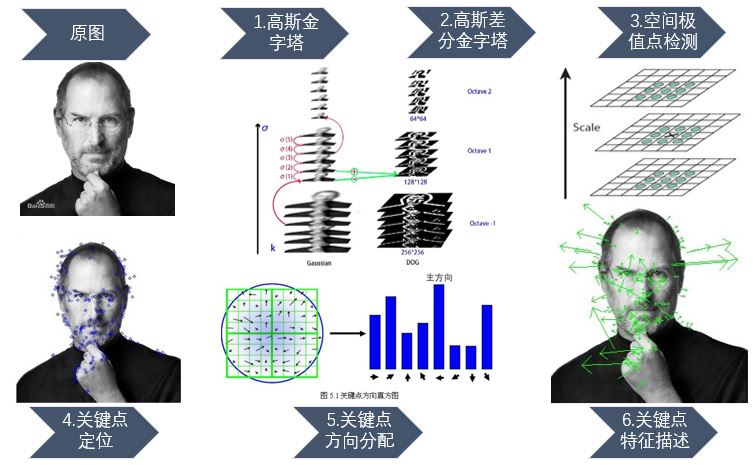
首先可以通过在原图上用高斯函数模板进行滑窗处理(卷积运算),得到模糊化的图像,高斯函数为:
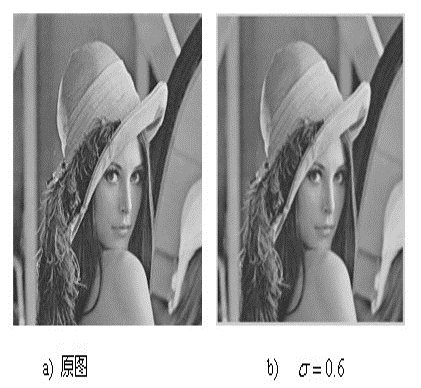
式中,(x, y)是模板的元素,(m, n)是模板的大小,sigma选值越大,处理后的图片也就更模糊,效果如下:

而后按照此方法,选择不同倍数的sigma(sigma、k*segma、k^sigma...)构造第一阶高斯金字塔,这里我们构建五层,然后选取第一阶的第三层,对其隔点采样作为为第二阶的第一层,再构建第二阶金字塔,后面同理,如下所示:

将高斯金字塔每一层减去它下面一层,得到差分金字塔(DOG):

检测DOG中一点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个点共26个点比较:
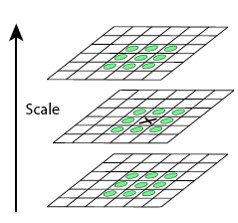
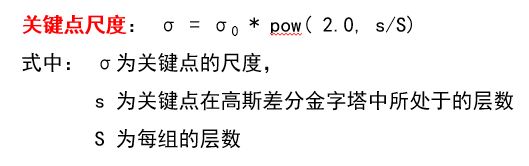
如果它比周围26个点都大或者都小,则该点将作为一个局部极值点, 我们称之为关键点记录,关键点尺度公式为:
对于在DOG金字塔中检测出的关键点,采集其所在高斯金字塔图像3sigma领域窗口内像素的梯度和方向分布特征,用直方图进行统计(与梯度直方图类似,将0-360°范围分为八个区间,每个区间45°):

然后统计关键点附近16×16像素的梯度方向分布与幅值(4×4为一个单元进行统计);
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6663
6663











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









