







 本文是关于Object Tracking的专题学习笔记,重点介绍了相关滤波跟踪中的MOSSE算法。通过理解互相关性和快速傅里叶变换(FFT),探讨如何找到最优滤波器模板以实现目标跟踪,同时考虑目标外观变化增强滤波器的鲁棒性。
本文是关于Object Tracking的专题学习笔记,重点介绍了相关滤波跟踪中的MOSSE算法。通过理解互相关性和快速傅里叶变换(FFT),探讨如何找到最优滤波器模板以实现目标跟踪,同时考虑目标外观变化增强滤波器的鲁棒性。
专题:Object Tracking
1. tracking work flow
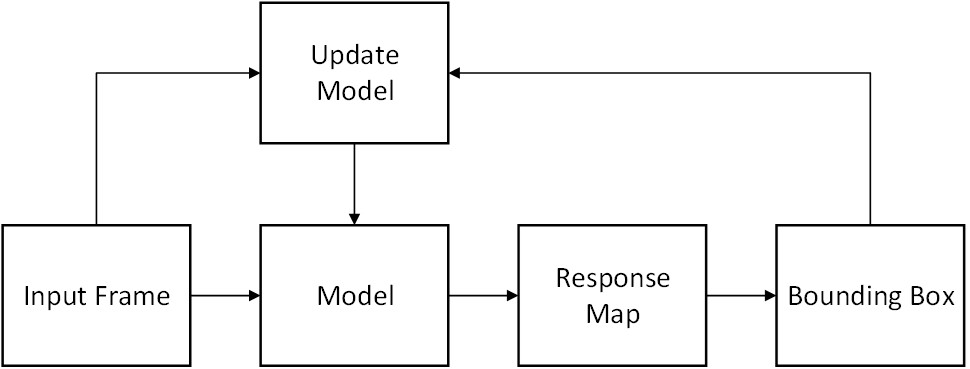
个人理解:输入图像作用在模型上,得到响应值,根据响应值在图片中画出边界框,然后边界框中的图像与输入图像一同作用对模型进行更新。
2.相关滤波跟踪(MOSSE)
相关滤波原理:相关性(correlation),用来描述两个因素之间的联系。而相关性又分为cross-correlation(互相关,两个信号之间的联系)和auto-correlation(自相关,本身在不同频域的相关性)。
假设有两个信号f和g,则两个信号的相关性(correlation)为:
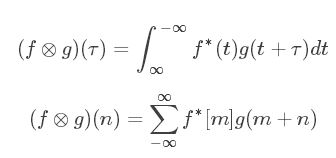
f*代表f的复共轭,相关性就是衡量两个函数在某个时刻相似程度。两个信号越相似,其相关值越高。应用在跟踪上就是要找到与跟踪目标响应最大的项。即要找到一个滤波器,使其在目标上的响应最大。
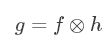
其中f代表输入的图像,h代表滤波模板,g代表响应值。对上式进行卷积运算,运算量较大,对其进行快速傅里叶变换(FFT),这样卷积操作经过FFT后就变成了点乘操作。

简化表示为:
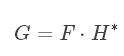
那么现在的目标就是要找到使得响应值最大的H*:
在实际跟踪的过程中我们要考虑到目标的外观变换等因素的影响,所以需要同时考虑目标的m个图像作为参考,从而提高滤波器模板的鲁棒性,所以就有了MOSSE这个模型:

因为上述操作都是元素级别的,只要使其中的每个元素(w和v是H中每个元素的索引)的MOSSE都最小即可。因此上式可转换为如下形式:
在上式中对H*求偏导,令其为0,即可求得:
求导结果为:(过程略)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4417
4417

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









