







Yocto集成QT5
本篇文章为基于raspberrypi 4B单板的yocto实战系列的第五篇文章:
一、yocto 编译raspberrypi 4B并启动
二、yocto 集成ros2(基于raspberrypi 4B)
三、Yocto创建自定义的layer和image
四、Yocto创建静态IP和VLAN
本章节实操代码请查看github仓库: meta-rpi-robot
一. 源码下载和编译
这一部分其实在第二节yocto集成ROS2中有涉及,但是为了连贯性和完整性本小节依然添加对应的描述,以方便只需要在yocto中集成QT的同学参考。
1.1 下载meta-qt5
进入到poky-kirkstone文件夹下执行如下指令下载meta-qt5源码:
git clone -b kirkstone https://github.com/meta-qt5/meta-qt5.git meta-qt5
如图所示:

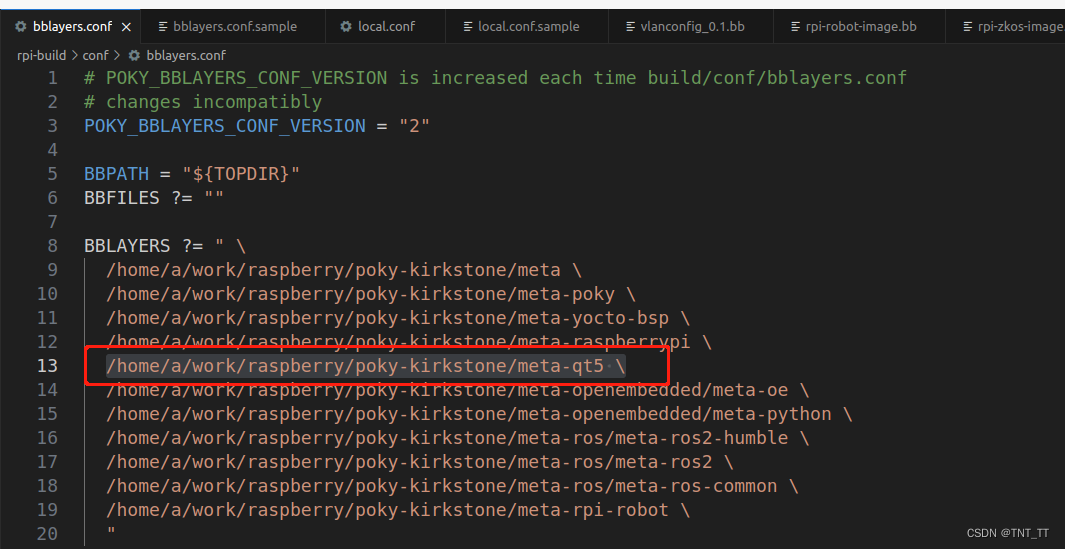
1.2 加入构建
修改rpi-build/conf/bblayers.conf,将meta-qt5 layer添加到构建系统中
二. Yocto集成
下面我们还需要将QT相关的组件打包到iamge里面去,在我们的rpi-robot-image.bb文件中添加如下内容:
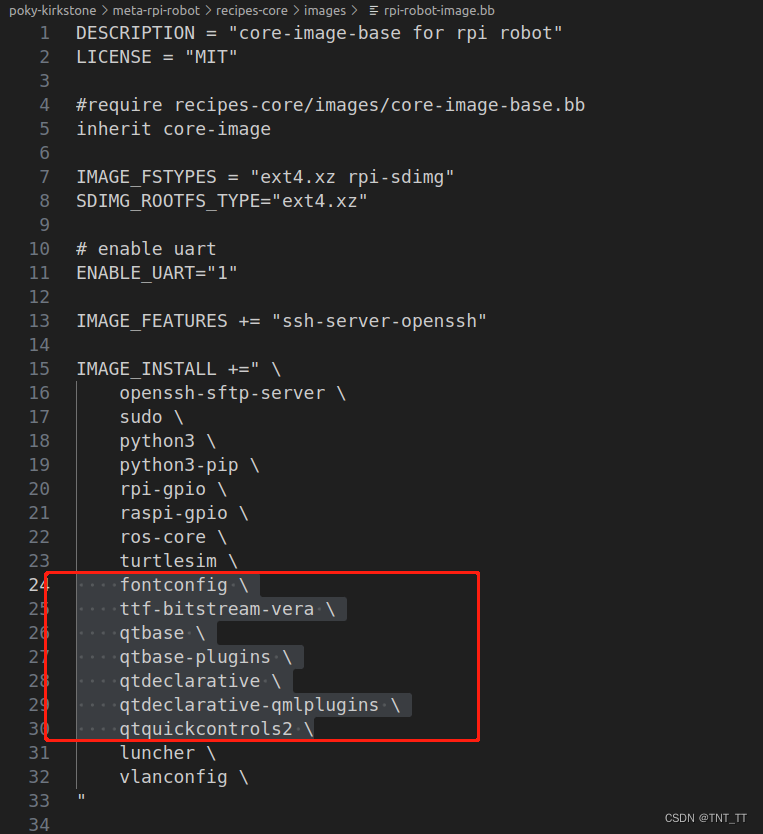
这里只是简单添加了几个组件,如果你的QT程序很复杂依赖库较多需要都添加进来。
依赖库有了,然后还需要对需要的QT组件进行一些配置:
这里我们需要配置插件打开eglfs,打开opengl:
在recipes-qt/qt5/下面新建一个qtbase_%.bbappend文件,里面内容如下:
# Disable desktop OpenGL. Enable OpenGL ES and EGFLS.
PACKAGECONFIG_GL = "gles2 eglfs"
# Enable fontconfig to get system freetype fonts
PACKAGECONFIG_FONTS += "fontconfig"
PACKAGECONFIG:append = " eglfs examples accessibility "
然后在rpi-robot-image.bb文件中添加如下配置,移除x11 的feature:
DISTRO_FEATURES:append = " opengl"
DISTRO_FEATURES:remove = " x11"
这样在执行如下编译指令编译出来的image里面就有了QT的依赖库和运行环境了
bitbake rpi-robot-image
三. QT5 运行环境配置
上面是一些常规流程,打包出来的image启动以后确实有了QT环境,但是不代表QT程序就可以运行,这里需要配置很多的QT环境才能保证QT程序能够正常,这里踩了不少坑,这部分网上的资料也比较少,着重介绍下这部分的适配过程。
主要官方介绍:
https://doc.qt.io/qt-5/embedded-linux.html
https://doc.qt.io/Boot2Qt-5.15/qtee-meta-qt5.html
显示架构介绍参考:
https://wiki.t-firefly.com/zh_CN/Firefly-Linux-Guide/graphics.html
https://doc.embedfire.com/linux/rk356x/Qt/zh/latest/lubancat_qt/qtdemo/demo_run.html
在嵌入式Linux系统上,可以使用多个平台插件:EGLFS,LinuxFB或Wayland。但是,这些插件的可用性取决于Qt的配置方式。
- LinuxFB
插件通过linux的FBDEV(Framebuffer Device)驱动显示,不支持硬件渲染,显示性能可能会不好。 - Wayland
一种显示服务协议,不依赖客户端-服务器体系结构,旨在提供一个现代、 安全的的Linux和其他类Unix操作系统窗口系统取代X Window system,而Weston是Wayland开源显⽰协议的参考实现。 - EGLFS
是 Qt 自己实现的一个 GUI 系统,不支持多窗口,eglfs使用opengles/egl进行gpu渲染后,直接送给drm去显示。
EGLFS is the recommended plugin for modern Embedded Linux devices that include a GPU.
本小节主要介绍EGLFS显示系统来显示QT 的应用程序。
EGLFS 需要使用的环境变量有如下内容:
# 指定显示平台插件,通过QT_QPA_PLATFORM 或者-platform命令行选项指定其他设置
export QT_QPA_PLATFORM=eglfs
# 此环境变量强制执行特定的插件,QT_QPA_EGLFS_INTEGRATION 设置为eglfs_kms将使用KMS / DRM后端
export QT_QPA_EGLFS_INTEGRATION=eglfs_kms
# KMS / DRM后端还通过JSON文件支持自定义配置,QT_QPA_EGLFS_KMS_CONFIG 指定配置文件的路径
# export QT_QPA_EGLFS_KMS_CONFIG=/usr/local/qt-app/conf/cursor.json
# 指定将current选择一种分辨率与当前模式匹配的模式,QT_QPA_EGLFS_ALWAYS_SET_MODE
#export QT_QPA_EGLFS_ALWAYS_SET_MODE=1
# 默认情况下,KMS后端将使用旧版API,可以启用DRM atomic API,通过将QT_QPA_EGLFS_KMS_ATOMIC环境变量设置为1。
#export QT_QPA_EGLFS_KMS_ATOMIC=1
# 鼠标设备,
# QT_QPA_EVDEV_MOUSE_PARAMETERS
#export QT_QPA_EVDEV_MOUSE_PARAMETERS=abs
#export QT_QPA_EVDEV_MOUSE_PARAMETERS=/dev/input/event2
# hide/show cursor
#export QT_QPA_EGLFS_HIDECURSOR=1
# 键盘设备
# 触摸设备
# eglfs 启用tslib支持,QT_QPA_EGLFS_TSLIB
#export QT_QPA_EGLFS_TSLIB=1
# 字体库
#export QT_QPA_FONTDIR=/usr/share/fonts
# 界面旋转角度 0,90,180,270,(使用触摸屏幕,触摸也要旋转)
#export QT_QPA_EGLFS_ROTATION=-90
四. QT Demo验证
本章节实操代码请查看github仓库: meta-rpi-robot meta-rpi-robot/recipes-apps/sample
上面运行环境准备号以后就可以跑一个QT测试程序验证下我们的功能是否正常,这里我们创建一个简单的QT qml程序,只显示一张照片.
我们在meta-rpi-robot文件夹下面创建一个子文件夹:
mkdir -p /recipes-apps/sample
里面结构如下:
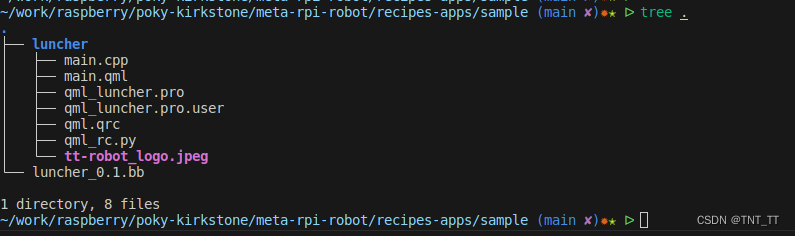
主要看一下luncher_0.1.bb文件:
SUMMARY = "Simple Qt application with QML"
DESCRIPTION = "A basic Qt application that uses QML for the UI"
LICENSE = "MIT"
LIC_FILES_CHKSUM = "file://${COMMON_LICENSE_DIR}/MIT;md5=0835ade698e0bcf8506ecda2f7b4f302"
FILESEXTRAPATHS:prepend := "${THISDIR}/:"
DEPENDS = "qtbase qtquickcontrols2"
SRC_DIR = "luncher"
SRC_URI = "file://luncher/"
S = "${WORKDIR}/luncher"
inherit qmake5
do_install() {
install -d ${D}${bindir}
install -m 0755 ${B}/qml_luncher ${D}${bindir}
}
FILES_${PN} = "${bindir}/*"
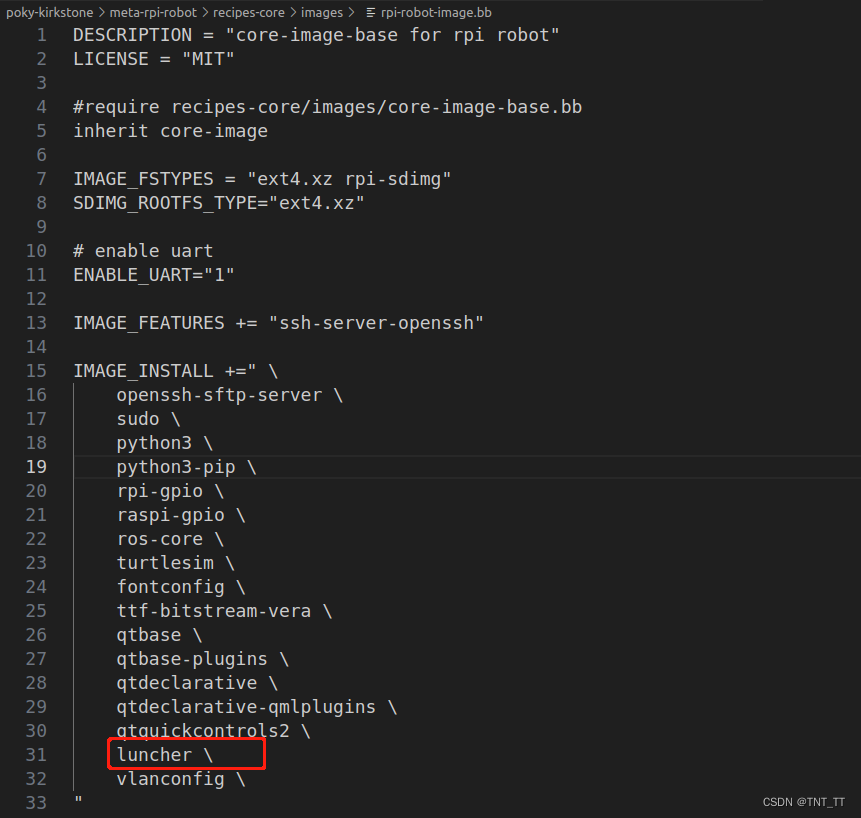
然后将luncher 添加到image的bb文件里面:
构建rpi-image
bitbake rpi-robot-image
SD卡刷机启动以后先设置以下环境变量然后执行qml_luncher app程序:
export QT_QPA_PLATFORM=eglfs
export QT_QPA_EGLFS_NO_LIBINPUT=1
qml_luncher
效果如下:

完整代码请查看github仓库: meta-rpi-robot















 3768
3768

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









