







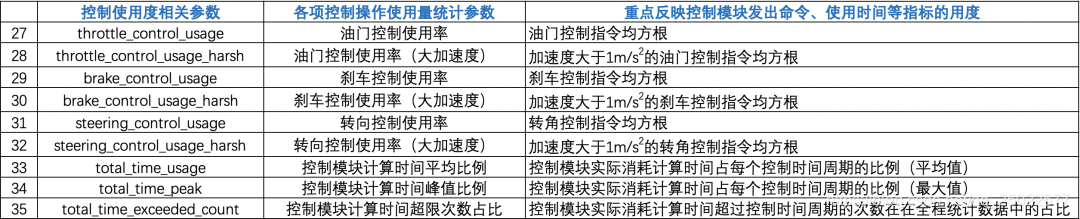
自动驾驶中,车辆控制是基础,以什么指标来测评就显的很关键,以下是Apollo 车辆控制评测分析指标,可以在此基础上做裁剪,来满足自己自动驾驶车辆控制的需求。





| 序号 | 参数 | 名称 | 说明 |
|---|---|---|---|
| 平均控制性能相关参数 |
控制器平均效果(即统计平均误差)统计参数
|
重点反映控制误差在全程中的(统计意义上的)平均效果
|
|
| 1 | station_err_std |
纵向位置误差率
|
描述规划控制过程中,纵向位置误差均方根 |
| 2 | station_err_std_harsh | 纵向位置误差率 (大加速度) |
描述轨迹规划纵向加速度大于1m/s2时,纵向位置误差率 |
| 3 | speed_err_std | 纵向速度误差率 | 描述规划控制过程中,纵向速度误差平方根 |
| 4 | speed_err_std_harsh | 纵向速度误差率 (大加速度) |
描述轨迹规划纵向加速度大于1m/s2时,速度误差均方根 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









