






一、方案
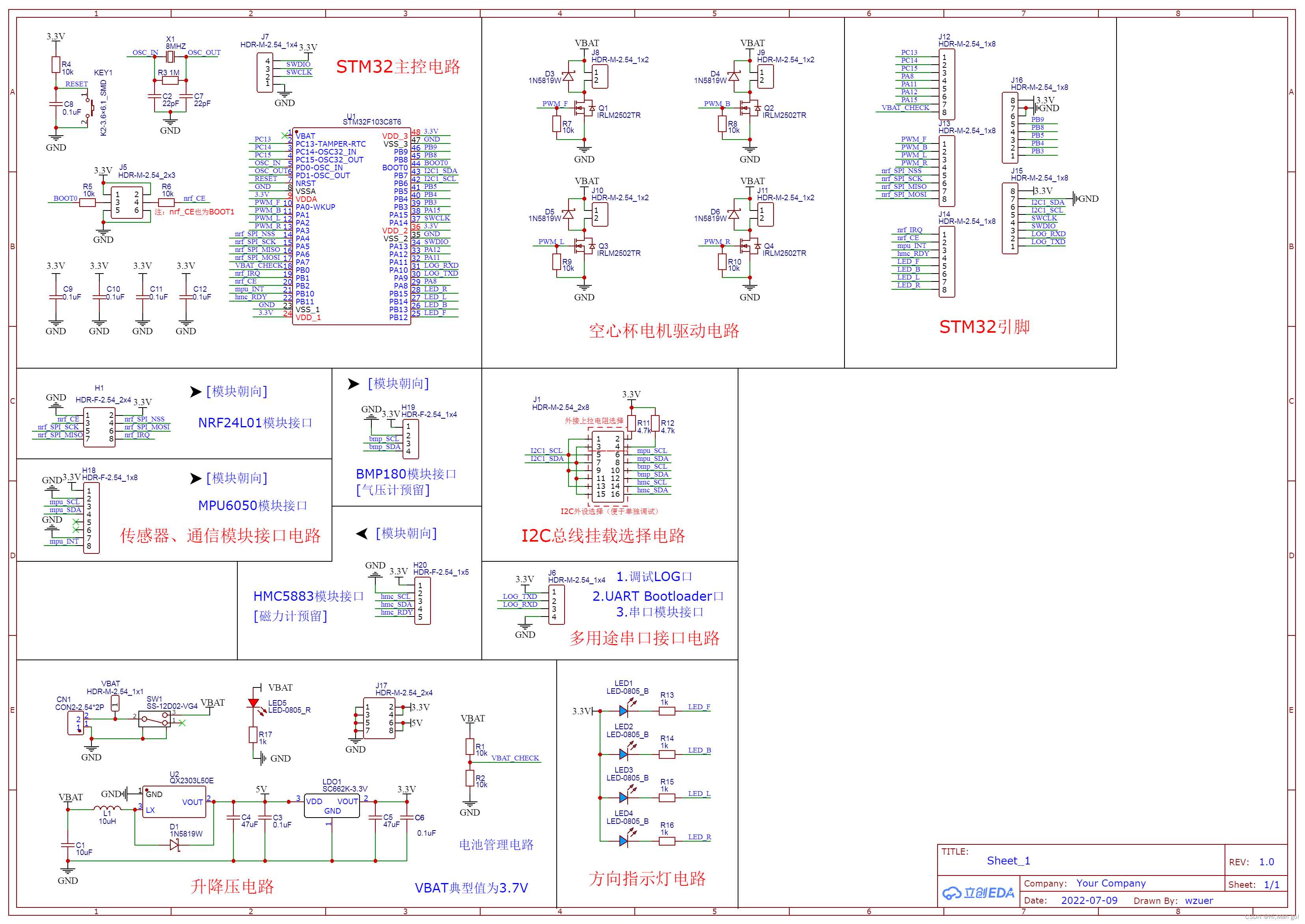
功能描述:具备mini四旋翼飞行器的基本功能,可以拓展其他模块实现定高、对航向角yaw的校准,将所有io引出并设计出最小系统板子功能,将设计I2C总线挂载选择电路便于调试和使用。可以考虑上FreeRTOS,定期采集传感器数据、与遥控手柄通信、做数据处理并控制电机。
外观规格:100mm*100mm
电源:3.7V(锂电池)转5V:QX2303L50E,驱动电流0.8A;5V转3.3V:SC662K-3.3V,驱动电流0.25A,锂电池检测电路,预留供电针脚
电机及驱动:电机采用720空心杯电机*4,驱动采用IRLM2502TR*4,优点是驱动电流大
主控:STM32F103C8T6,引脚足够用,处理速度也足够。最小系统功能有BootMode Select、XTAL 8MHz、Key Reset、SWD、UART1 for Multiple function(uart bootloader、log、uart or spi module)
外设模块接口:NRF24L01、MPU6050、HMC5883、BMP180、同时还有设计了I2C总线挂载选择电路
二、硬件实现
原理图:
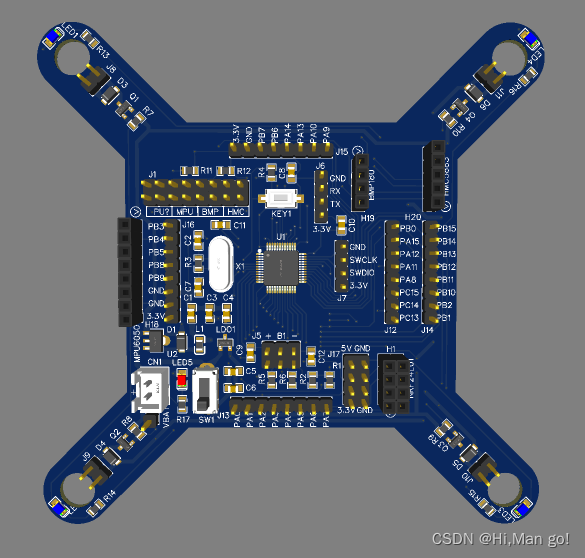
PCB 3D预览:
硬件成本:
保留……
二、软件实现
保留……















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











