







 该开源项目使用STM32F103C6T6A微控制器,通过主控与驱动分离的方式控制三相无刷直流电机。已验证霍尔传感器有感方案,采用六步换相方法,并利用HALL中断进行换相位控制。硬件包括主控板、驱动板和按键板,软件基于裸机开发,采用分时调度。
该开源项目使用STM32F103C6T6A微控制器,通过主控与驱动分离的方式控制三相无刷直流电机。已验证霍尔传感器有感方案,采用六步换相方法,并利用HALL中断进行换相位控制。硬件包括主控板、驱动板和按键板,软件基于裸机开发,采用分时调度。
三相无刷直流电机驱动设计

说明
- 所有的硬件和代码已经开源,请移步代码开源连接
- 首先这个项目这个是自己学习的时候做的,目前已经验证霍尔有感方案,其他的还没验证。
- 如果当中存在问题,欢迎评论区一起讨论。
介绍
stm32直流电机控制
- 采用STM32F103C6T6A作为主控
- 主控与驱动分离
- 采用三相逆变桥电路
- 前级采用栅极驱动MOS,自带闭锁
- 驱动板可适配有感,无感方案
项目简介
在本项目中。采用主控与驱动分离的方式。其大致框图如下所示。
一共分为三块板子,分别为BLDC_Core板(主控板)、BLDC_Drive板(驱动板)、KEY板(按键板)。每个板子之间用SH1.0的线束进行连接,目前已经验证有感方案HALL换相无问题。其满载电机空转整个系统800mA。
六步法
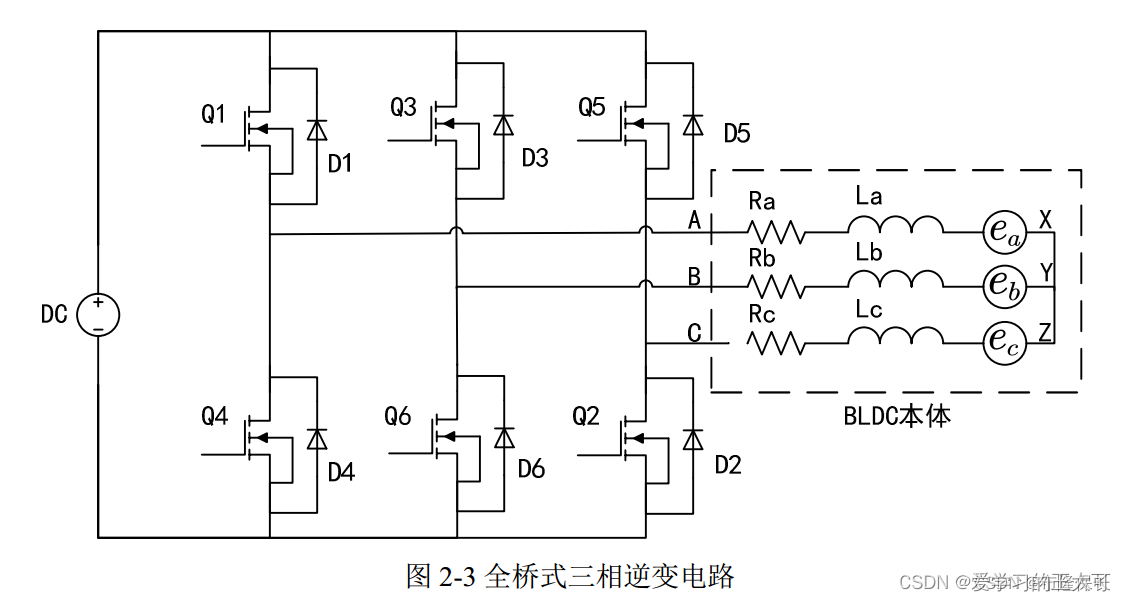
实际上三相直流无刷电机可以理解为采用交流电来控制,而在驱动板当中的逆变桥就是来产生交流电的。在最常用的BLDC驱动中,比较常用且简单的就是采用六步换相来驱动电机。而这种方法可以称为6步法
六步法中的三相电机每次只有两组绕组有电流通过,产生磁场。为了让电机旋转,一般按照Q1Q2—Q2Q3—Q3Q4—Q4Q5—Q5Q6—Q6Q1的顺序依次导通功率开关管。下图是逆变器的结构。
HALL换相位法
在本设计当中,采用外部中断来获取HALL值,当电机旋转时,会触发HALL中断,在中断中读取HALL的值,根据实际的值来进行换相位,就能够驱动电机。下表是一版直流无刷电机的换相表。
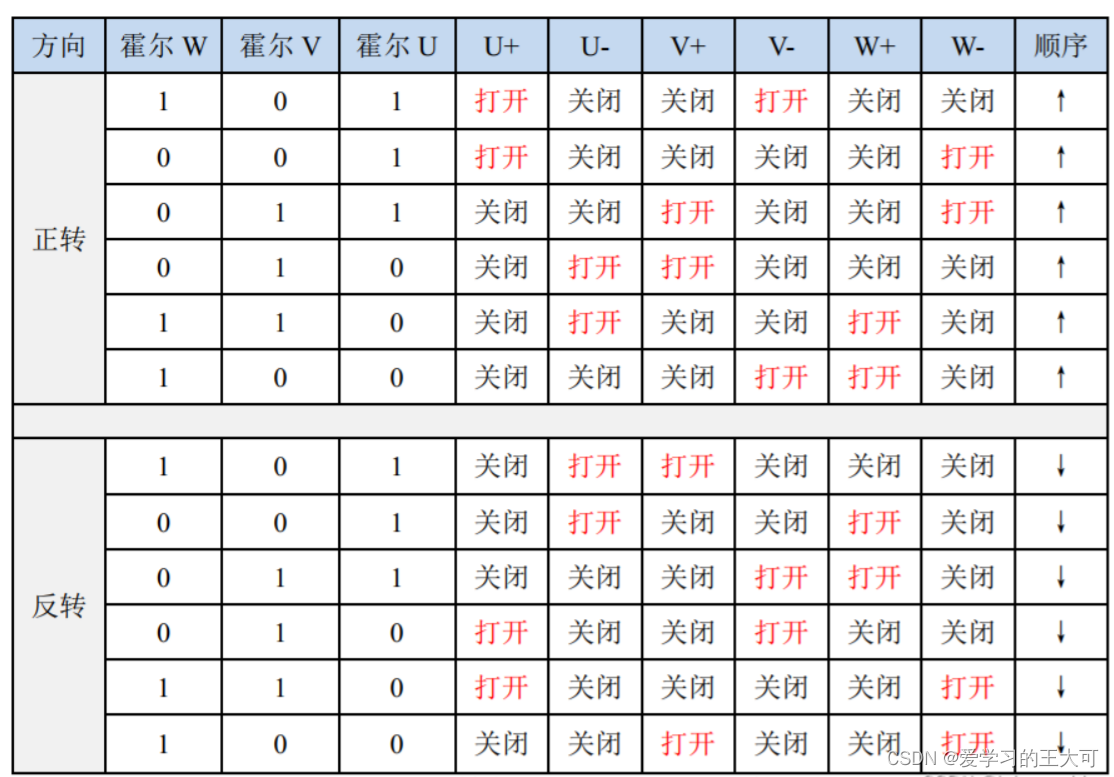
根据我们的换相表,就能以此设计出六步换相的程序。以正转为例,我们便可以设计出如下程序。其中hall_state是获取到的霍尔的值。本设计中:上管调制,下管驱动。
switch (hall_state)
{
case 1:
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_3);//U+
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_2);//V+
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_1);//W+
UL_OFF;VL_OFF;WL_ON;//下管
break;
case 2:
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_3);//U+
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_2);//V+
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_1);//W+
UL_ON;VL_OFF;WL_OFF;//下管
break;
case 3:
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_3);//U+
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_2);//V+
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_1);//W+
UL_OFF;VL_OFF;WL_ON;//下管
break;
case 4:
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_3);//U+
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_2);//V+
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);//W+
UL_OFF;VL_ON;WL_OFF;//下管
break;
case 5:
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_3);//U+
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_2);//V+
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_1);//W+
UL_OFF;VL_ON;WL_OFF;//下管
break;
case 6:
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_3);//U+
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_2);//V+
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);//W+
UL_ON;VL_OFF;WL_OFF;//下管
break;
default:
Motor_Stop();//电机停转
break;
}
原理图
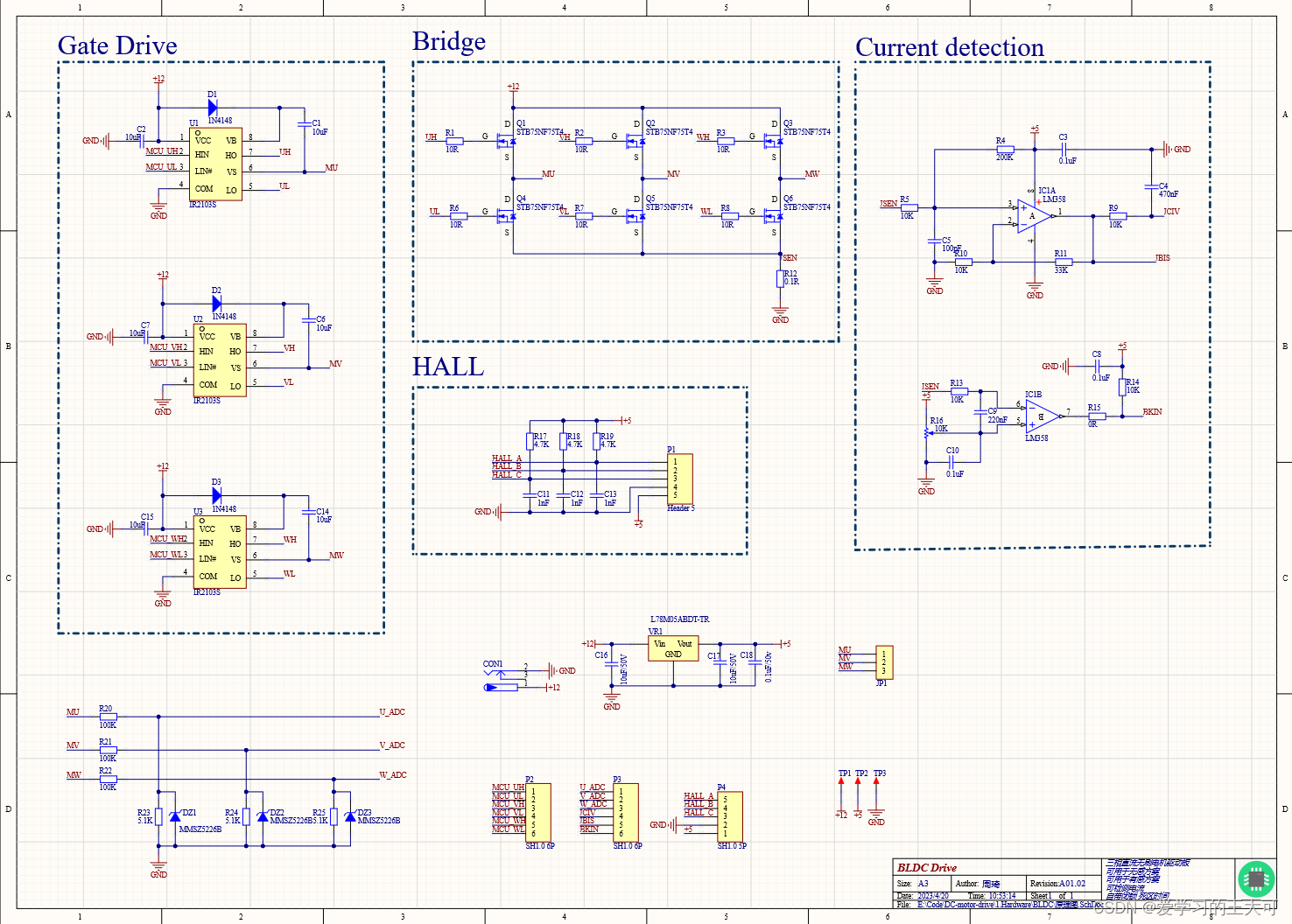
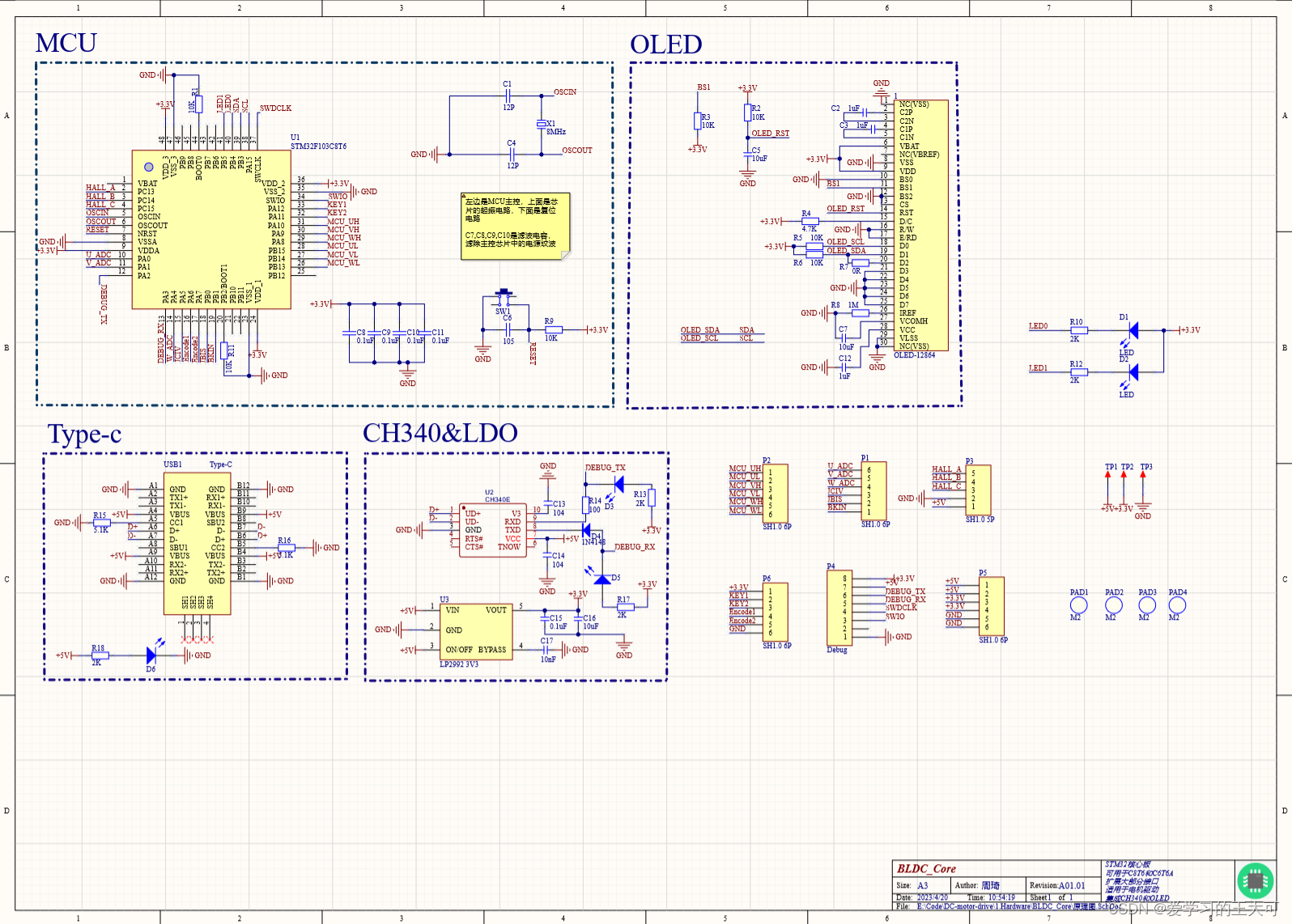
下方给出了本设计当中的原理图。
BLDC_Drive原理图
BLDC_Core原理图
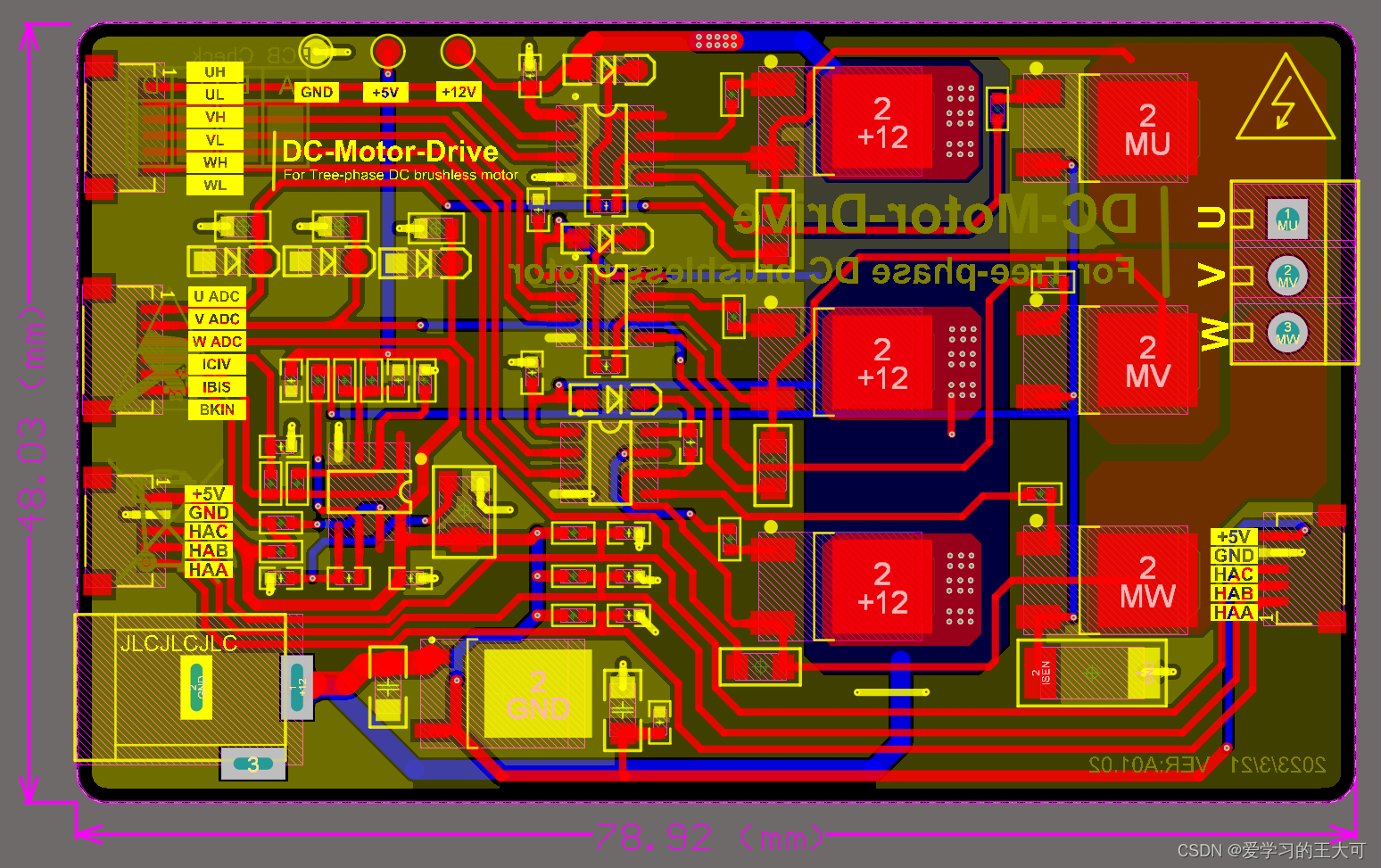
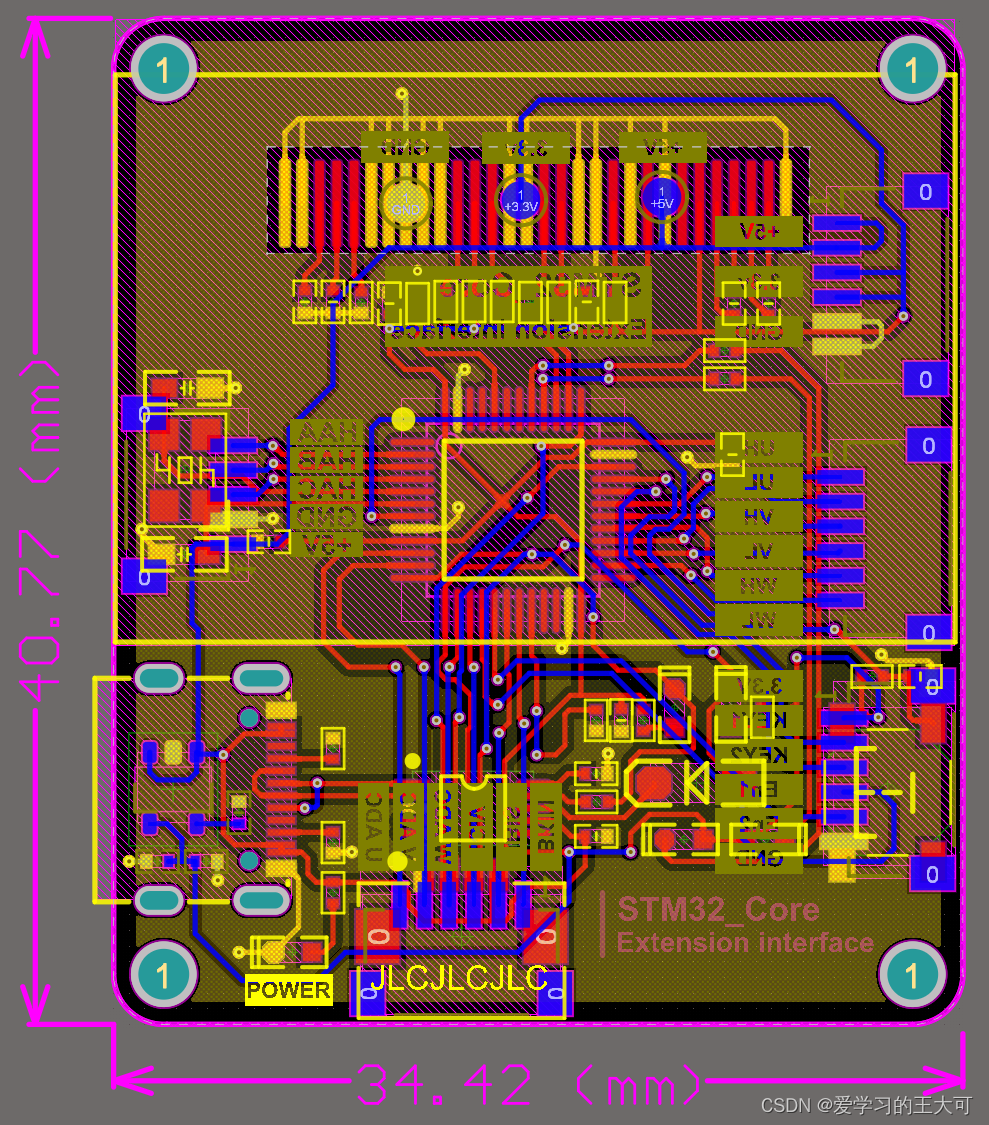
PCB
下方给出了本设计当中的PCB。
BLDC_Drive的PCB
BLDC_Core的PCB
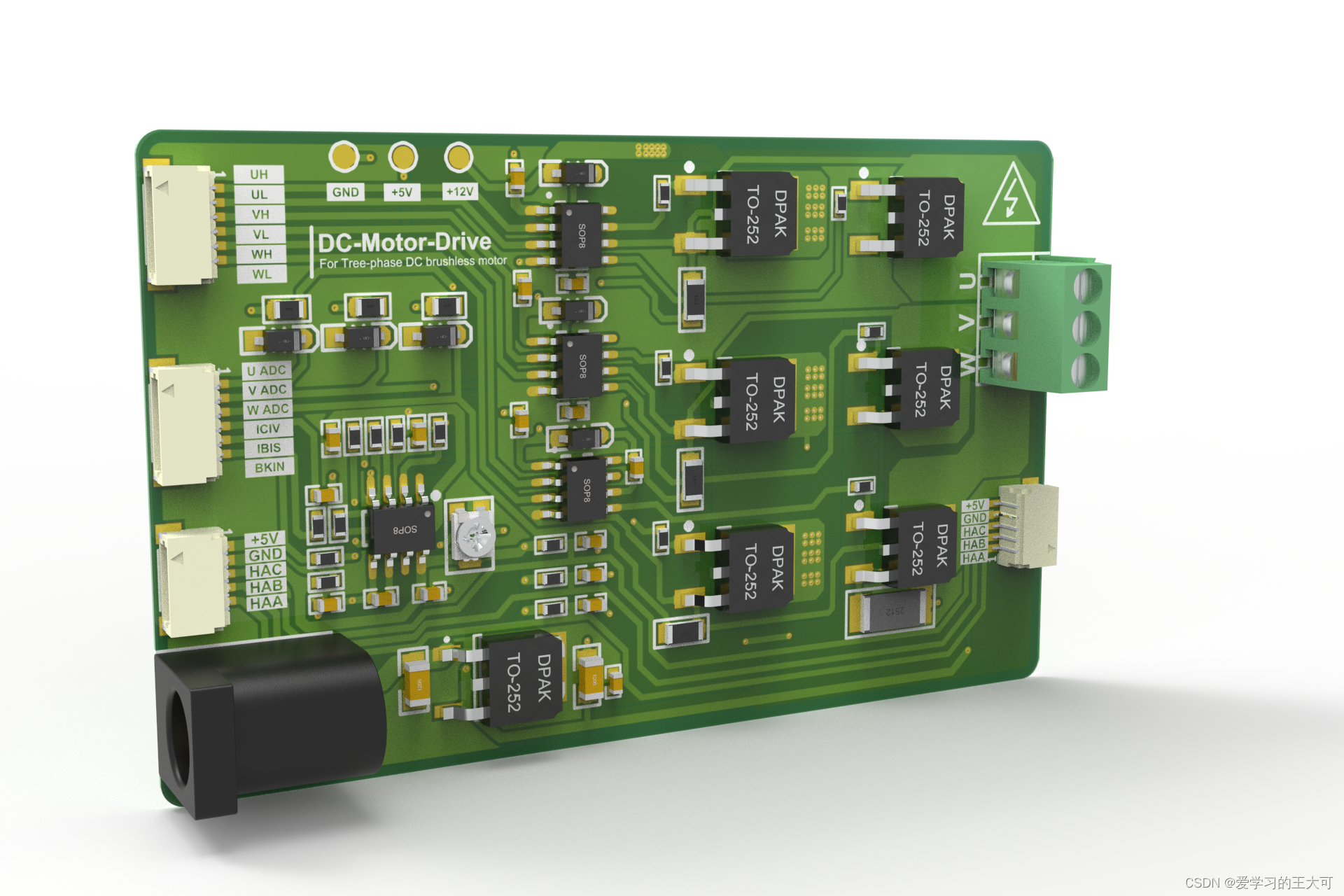
渲染图
下方给出了本设计当中的渲染图。
BLDC_Drive的渲染图
BLDC_Core的渲染图

软件架构
在软件框架上主要采用了裸机开发,适用了分时调度,采用定时器2来产生1MS的时基标志位。通过这个标志位来完成调度,具体调度部分代码可参考User_Scheduler.c文件。在换相控制方面在HALL中断当中完成,电机驱动部分代码可参考hall.c和motor.c文件。

















 636
636

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









