






文章目录
本文回答的问题
CCM和DCM模式波形分析
参考博客
本文回答的问题
CCM模式和DCM模式的定义?为什么比较少用BCM模式?
A:在Buck、Boost、Buck-boost电路原理介绍中,提到过CCM模式和DCM模式。CCM (ContinuousConduction Mode)连续导通模式,即一个开关周期内,电感电流不会到0A。这些拓扑还可工作在BCM(Boundary Conduction Mode)临界导通模式和DCM(Discontinuous Conduction Mode)非连续导通模式。
可见,不同模式的定义是通过电感电流是否连续或者是否到0来区分。下图可以更直观的区分不同模式下电感电流的波形示意图:(其中CCM模式和BCM模式的电感电流波形在同一坐标系下,CCM模式的IL_MIN≠0)

由上图可见,BCM模式,是CCM模式和DCM模式的临界条件。在实际设计中,常常需要控制器监控电感电流,一旦检测到电流等于0,功率开关立即闭合。该设计会提高复杂度。BCM模式常用于中小功率下,对效率要求较高的产品中。因此在常见的设计中,通常仅考虑CCM模式和DCM模式。
如何区分CCM和DCM模式?
A:根据定义判断CCM和DCM模式:通过电感电流归零的状态,来辨别电路的工作状态。
什么时候适用于DCM模式?什么时候适用于CCM模式?
A:继续分析CCM、BCM、DCM的电感电流波形图,可以直观的看出,CCM模式下,Io>△IL/2,DCM模式下,Io<△IL/2。因此,可以从电感电流纹波出发,区分DCM模式和CCM模式适用的场景。
BCM是CCM和DCM的区分点,其中BCM的电感电流纹波:Δ I L = I o \Delta I_L = IoΔI
L
=Io。此外:
CCM的电感电流纹波:Δ I L < 2 ∗ I o \Delta I_L <2*IoΔI
L
<2∗Io;
DCM的电感电流纹波:Δ I L > 2 ∗ I o \Delta I_L >2* IoΔI
L
>2∗Io。
根据经验设计,对于反激而言,通常在系统输出功率较小(<30W)时,采用DCM模式;在输出功率较大(>30W)时,采用CCM模式。另外,CCM模式更适用于低输出电压且输出电流高的场合,而DCM适合于高输出电压且电流较低的场合。
开始的分析思路:在参数设计过程中,电感电流纹波Δ I L = ( 0.2 − 0.4 ) ∗ I L \Delta I_L=(0.2-0.4)*I_LΔI
L
=(0.2−0.4)∗I
L
,其中0.2-0.4为电感电流纹波系数,IL为电感电流平均值。想到对于Buck电路而言,电感电流平均值IL=输出电流平均值Io;然后代入电感电流纹波和输出电流的比较公式中,发现仅适用于Buck电路仅适用于CCM模式。总感觉有问题。后面想到,原来这个电感电流本身就是在CCM模式下推导得出的。
CCM模式和DCM模式的特点总结?
先写结论,分析在后续的参数设计中详细说明。

DCM模式 CCM模式
原边感量较小,变压器可以设计的较小 原边感量较大,变压器较大
副边整流二极管可以零电流恢复,无反向恢复损耗,可以采用低成本二极管 副边二极管不能零电流恢复,需要采用快恢复二极管或肖特基二极管,同时还会有额外的损耗
交流纹波大,MOS管和器件内阻损耗大 交流纹波小,与DCM相比导通损耗小;
变压器的磁通摆幅较大,有较大的磁滞损耗。 变压器的磁通摆幅较小,磁滞损耗较小。
副边二极管电流断续,更换为MOS管后容易实现同步整流 不易实现同步整流
常用于<30W,或高压小电流场景 常用于>30W,或低压大电流场景
对于环路稳定性而言:①是一阶低频系统,即使在电压模式也很容易稳定。②在低频区没有右半平面零点,得到的穿越频率较高,也就是将环路带宽设计的较高。③电流模式下不会产生次谐波震荡; 对于环路稳定性而言:①存在右半平面零点,所以环路带宽不能设计的过高,同时在占空比大于50时,峰值电流控制模式下需要进行谐波补偿;②电源模式下,不容易稳定。
反激CCM模式和DCM模式工作波形分析?
将进行详细分析。
CCM和DCM模式波形分析
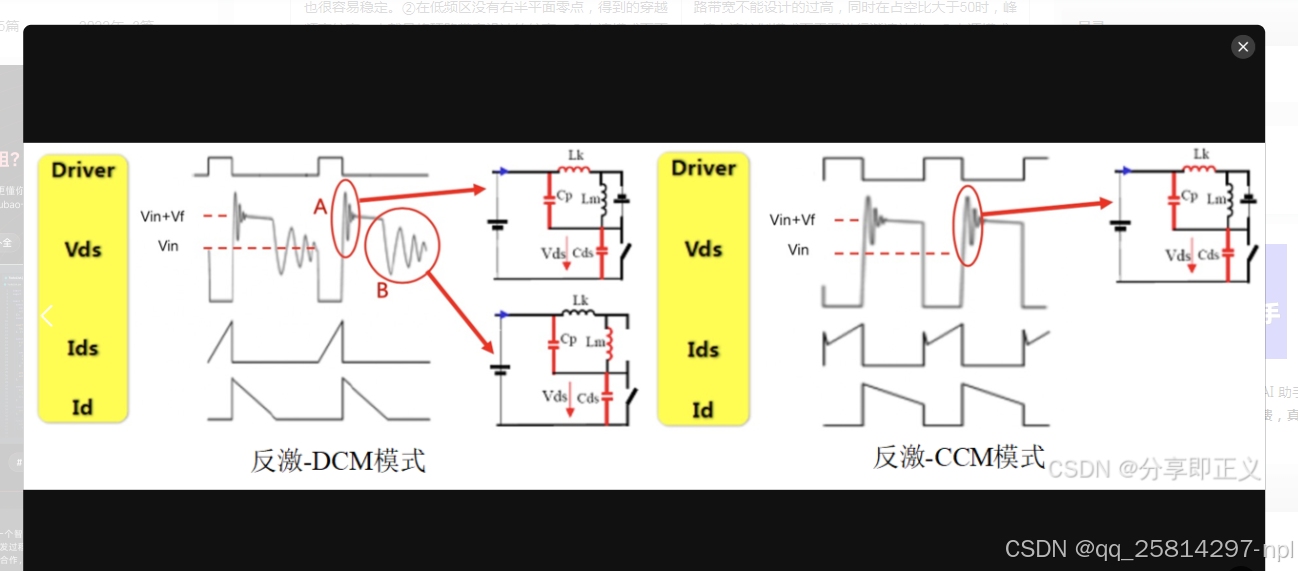
Vf次级反射到原边的电压,Vf=Vout*n,n为原副边匝比。
Lk为变压器原边漏感,Lm为变压器原边自感

波形分析 DCM模式 CCM模式
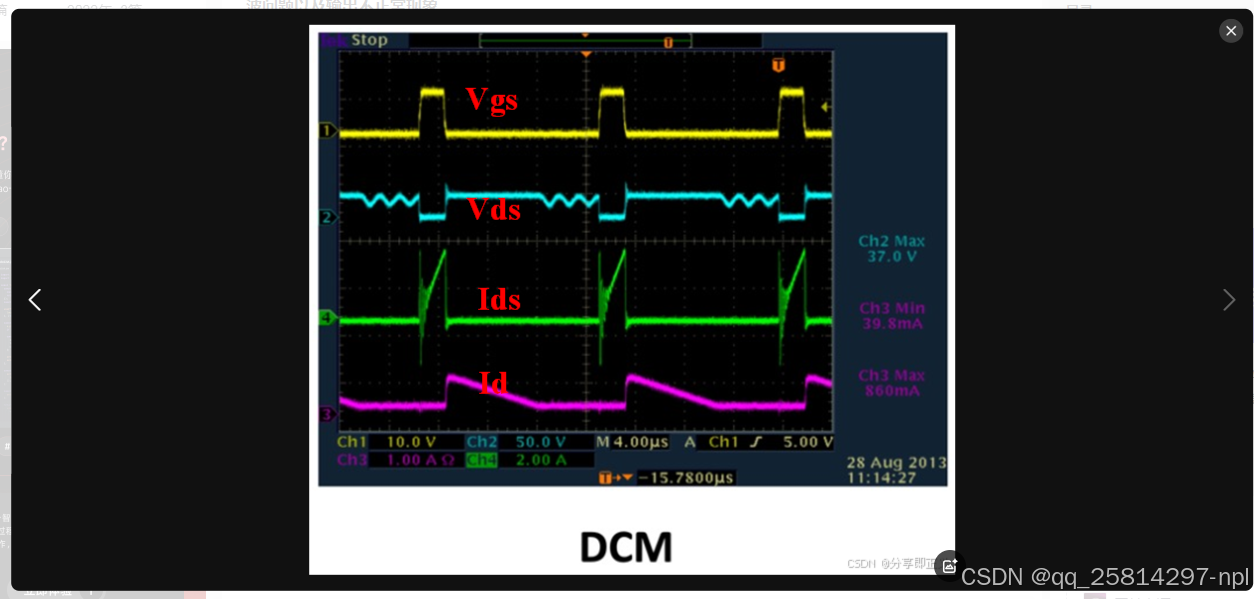
MOS管Vds波形 下一周期开通前,Vds会从Vin+Vf这个平台降下来发生阻尼震荡。 下一周期开通前,Vds一直维持在Vin+Vf的平台上。
MOS管Ids波形(原边电感波形) 三角波 矩形波
副边二极管Id波形 三角波 矩形波
Vds尖峰形成原因 尖峰A:在MOS管截止时刻,原边电感Lm为MOS管DS电容充电,同时,由于漏感的电流也是不能突变的,而漏感的电流变化也会产生感应电动势, 这个感应电动势因为无法被次级耦合嵌位,所以电压会冲得超过Vin+Vf。此后,漏感Lk与Cds发生LC谐振,由于变压器绕线线阻、器件内阻会对谐振能量进行损耗,谐振会慢慢变小。
尖峰B:在尖峰B产生之前,副边二极管导通,原边电压被钳位。尖峰B的产生是由于副边电感放电完毕,副边二极管截止,此时Cds电容反向给漏感Lk充电,再次形成LC谐振,导致阻尼振荡。 尖峰A:该尖峰与DCM模式的尖峰A产生的原因相同。
MOS管尖峰A的抑制方法:为了避免MOS管被这个尖峰电压击穿损坏,一般设计时会在初级侧加上一个RCD吸收缓冲电路,把漏感的能量先存储在电容©上,然后在通过电阻®消耗掉。一般需要抑制到尖峰电压小于MOS管漏源电压的80%以下,才算安全范围。同时要防止过吸收或欠吸收。(在后续的参数设计中,将详细介绍RCD吸收的设计过程)。
实际电路中,在MOS管开通时,存在Ids电流尖峰问题,如下图所示。该尖峰的产生原因:变压器存在匝间电容,在MOS管导通瞬间,匝间电容瞬间放电,导致存在电流尖峰。该尖峰会导致反激误关断,导致驱动大小波问题以及输出不正常现象。
一般在采样流过MOS管电流时,通常需要加入一个RC低通滤波,RC的截止频率需要远大于开关频率,同时,需要满足RC充电时间大于(3-5)*250ns,这样取RC最小的充电时间为1000ns,及截止频率要小于1Mhz。通常RC滤波的R:100Ω-1000Ω;C:100pf-1000pf。该RC滤波电路,在反激中也称消隐电路。
拓展:CCM模式切换到DCM模式?——对Buck电路而言。
前面提到:
CCM的电感电流纹波:Δ I L < 2 ∗ I o \Delta I_L <2*IoΔI
L
<2∗Io;
DCM的电感电流纹波:Δ I L > 2 ∗ I o \Delta I_L >2* IoΔI
L
>2∗Io。
CCM模式转化到DCM模式的方法就是就是要降低输出电流(负载电流)Io或者增大ΔI
CCM下电感电流纹波为:
Δ I L = V i n − V o L ∗ D ∗ T \Delta I_L = \frac{Vin-Vo}{L}*D*T
ΔI
L
=
L
Vin−Vo
∗D∗T
(1) 在其他条件不变的情况下,增大阻抗R,即减小负载。因为在输出电压Vout不变的情况下,R越大,Io越小;
(2) 在其他条件不变的情况下,减小电感L。因为ΔI与L是存在计算关系的,这个在之前电感公式推导的文章中有详细推导。L减小,可以增大ΔI,使ΔI>2Io。
(3) 在其他条件不变的情况下,增大开关周期T,即减小开关频率fs。也可以使得ΔI增大。
参考博客
反激电源拓扑CCM与DCM的特点——电路一点通
介绍了CCM和DCM模式各自的特点,明白了在选取过程如何决策
反激拓扑中初级侧MOS管Vds波形分析——学海无涯_come on
重点介绍了DCM(断续模式)和CCM(连续模式)的判断依据及其波形特点,以及MOS管在DCM和CCM模式下实际Vds波形分析。此外,讲解了六种方法应对MOS管VDS电压尖峰,涉及MOS管分类、驱动电路设计和选型注意事项,以及量产中的安装技巧和散热策略。
反激开关电源VDS波形连续模式断续模式临界模式DCM ccm BCM——开关电源分享
视频介绍,DCM、CCM、BCM模式下MOS管的Vds电压,超详细!
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/MIAOXIAO77/article/details/141302679

















 875
875

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









