







1、非局部均值去噪是空域滤波的一个重大突破,它利用自然图像的冗余,基本思想是:当前像素点的灰度值与图像中所有与其结构相似的像素点加权平均得到。如何衡量结构相似的像素点,也即如何确定权值系数?其做法是:对于每一个像素点的权值,采用以该像素点为中心的图像子块(7*7)或(9*9)与当前像素点为中心的子块之间的高斯加权欧氏距离来计算。
参考:
http://www.ceremade.dauphine.fr/~peyre/matlab/graph/content.html
http://shijuanfeng.blogbus.com/logs/221433712.html
A. Buades, B. Coll, J.M. Morel “A non local algorithm for image denoising” IEEE Computer Vision and Pattern Recognition 2005, Vol 2, pp: 60-65, 2005.
参考自:http://blog.csdn.net/bluewind_1988/article/details/7945302
2、非局部均值去噪算法其实很简单,该种去噪方法和高斯去噪和双边滤波器去噪很像,都是利用一些准则,通过“周围”的像素点加权估计像素点的真实值,如下图所示:
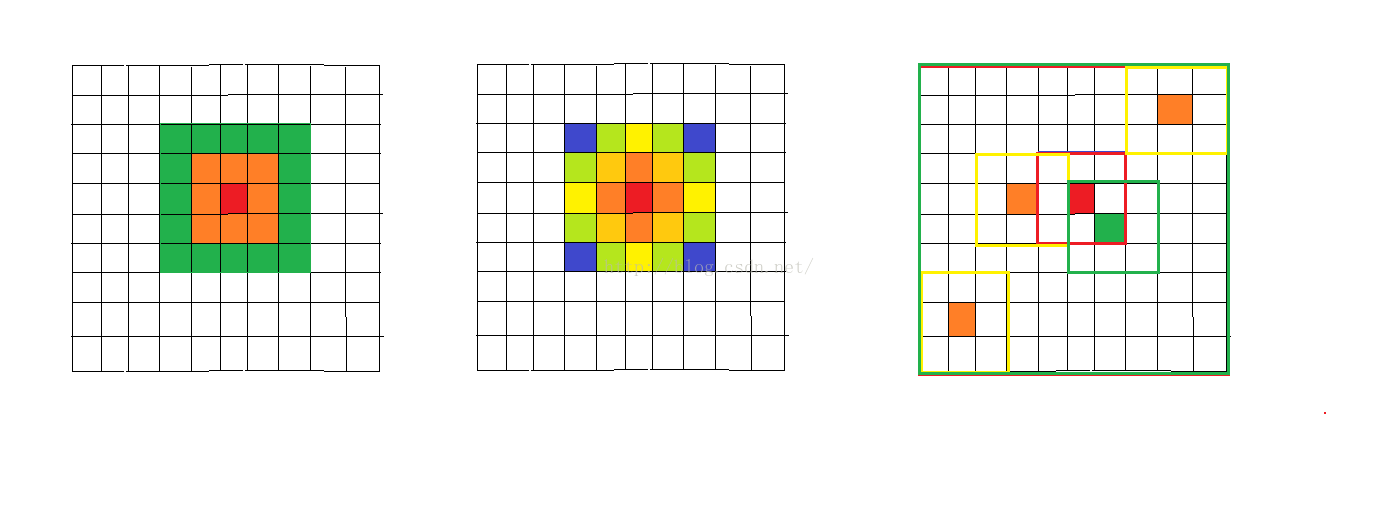
最左边一副图表示Gauss滤波的特点,就是利用图像像素点相近的程度来估计权重,中间幅图表示双边滤波器在考虑像素点本身取值的相近性以外,还考虑了相近像素点与被估计的像素点的距离,如果离被估计的像素点越近将具有更高的权重,非局部均值则是在一个窗口中搜索相近的图像块来进行权重分配(如绿色的框内的区域为搜索的区域,黄色的窗口为搜索的图像块,深褐色的窗口中的中心点为需要去噪的点,通过加权的形式将最相近的几个像素块中的中心点结合起来估计真实值。
参考自:http://blog.csdn.net/hit1524468/article/details/51417696
3、非局部均值滤波 nonlocal mean filter:
非局部均值滤波是Buades等 在2005年提出的一种滤波方法。其基本思想是根据图像的自相似性来计算邻域像素的权重。
NML算法首先需要选取两个窗,分别为相似窗和搜索窗,相似窗被选取用于比较两个像素的相似性,搜索窗被选择用于确定计算相似像素的范围。中心像素i与其邻域的像素j之间的相似性权重是根据两像素相似窗高斯加权的欧式距离决定,公式如下:
非局部均值滤波有与双边滤波相比,非局部均值根据具有一定大小的图像片之间的相似性来决定两像素的相似性,较双边滤波可以更好的识别图像的细节。但非局部均值算法的滤波参数h比较难调,h控制衰减的速度,如果没有过大的衰算法会退化为均值滤波,过小的衰减算法又会没有平滑效果,一般h参数的选择会参照图像噪声的标准差。
参考自:http://blog.csdn.net/numit/article/details/46842589















 570
570

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









