







 本文介绍了Marching Cubes算法在构建体素圆中的应用。首先,文章详细阐述了如何将点云数据转换为体数据。接着,讨论了如何找到六面体体素与等值面的交点,以生成等值面。最后,文章讲解了如何用这些交点表示等值面的三角形,以实现体素球的可视化。附带了相关的代码实现。
本文介绍了Marching Cubes算法在构建体素圆中的应用。首先,文章详细阐述了如何将点云数据转换为体数据。接着,讨论了如何找到六面体体素与等值面的交点,以生成等值面。最后,文章讲解了如何用这些交点表示等值面的三角形,以实现体素球的可视化。附带了相关的代码实现。
Marching Cubes初探——Marching Cubes构建体素圆
标签(空格分隔): MarchingCubes OpenGL
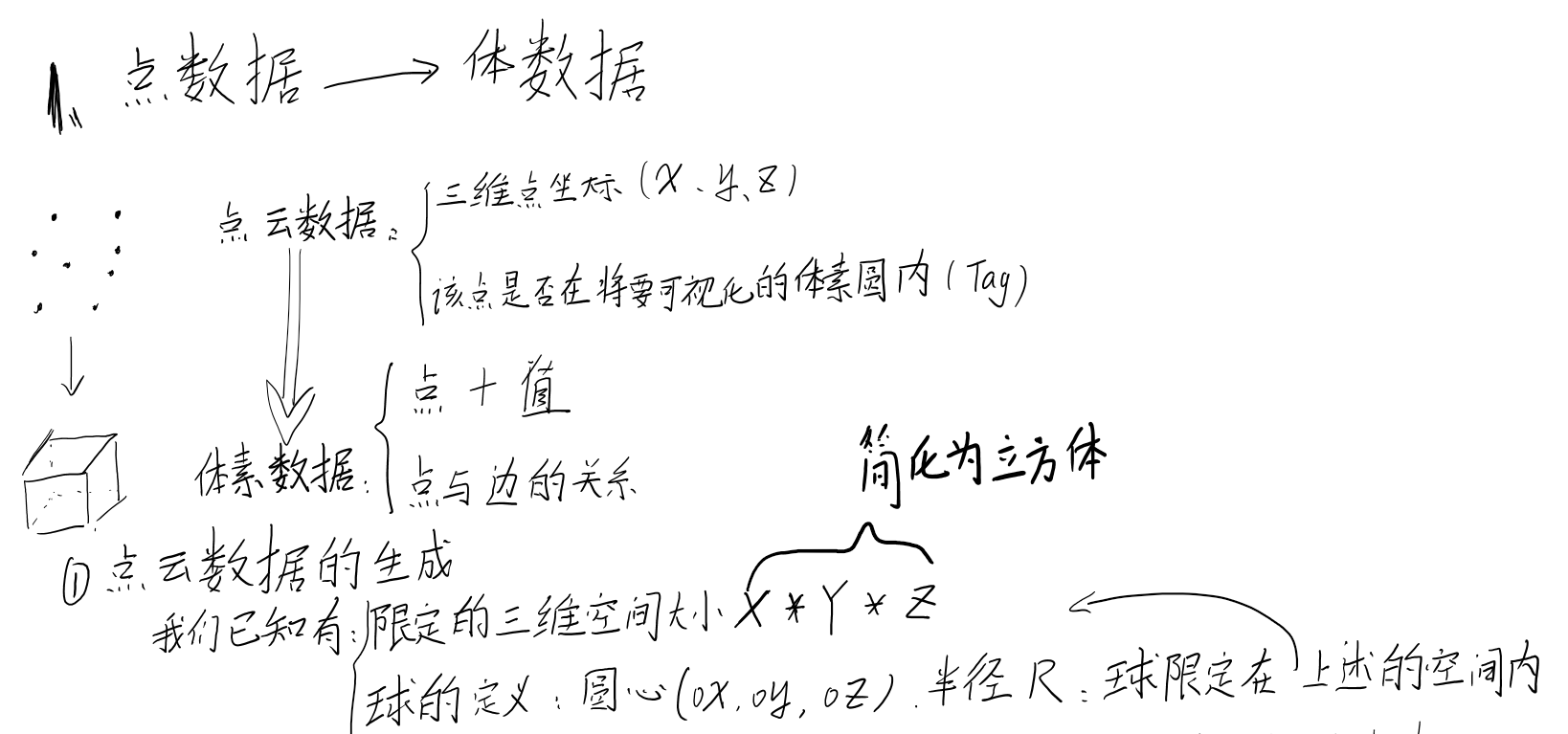
Marching Cubes根据三维规则数据生成等值面,从而构成三维体数据。
我们的需求是自己生成三维球的点云数据,并通过Marching Cubes可视化体素球。
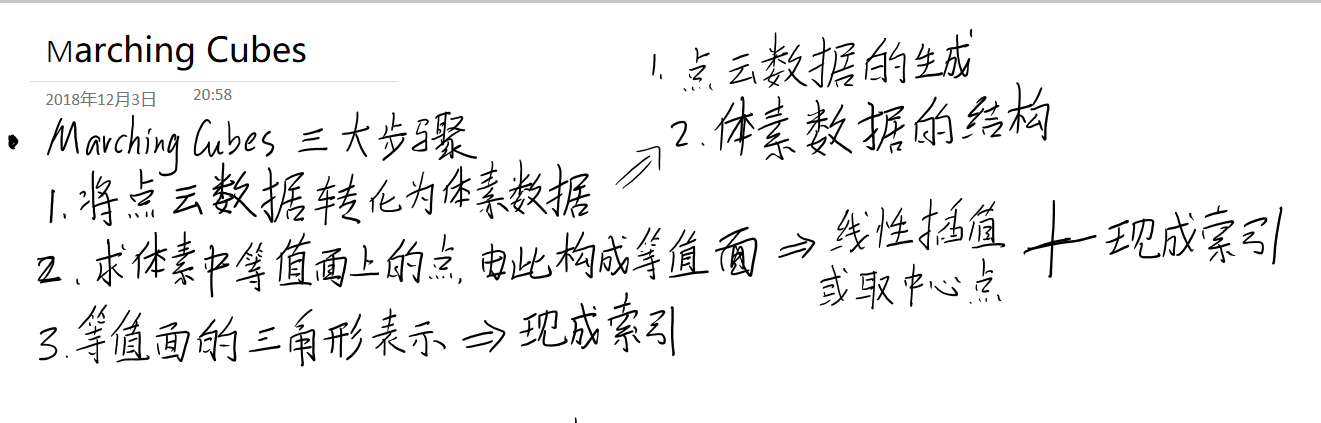
整个流程可分为三步:
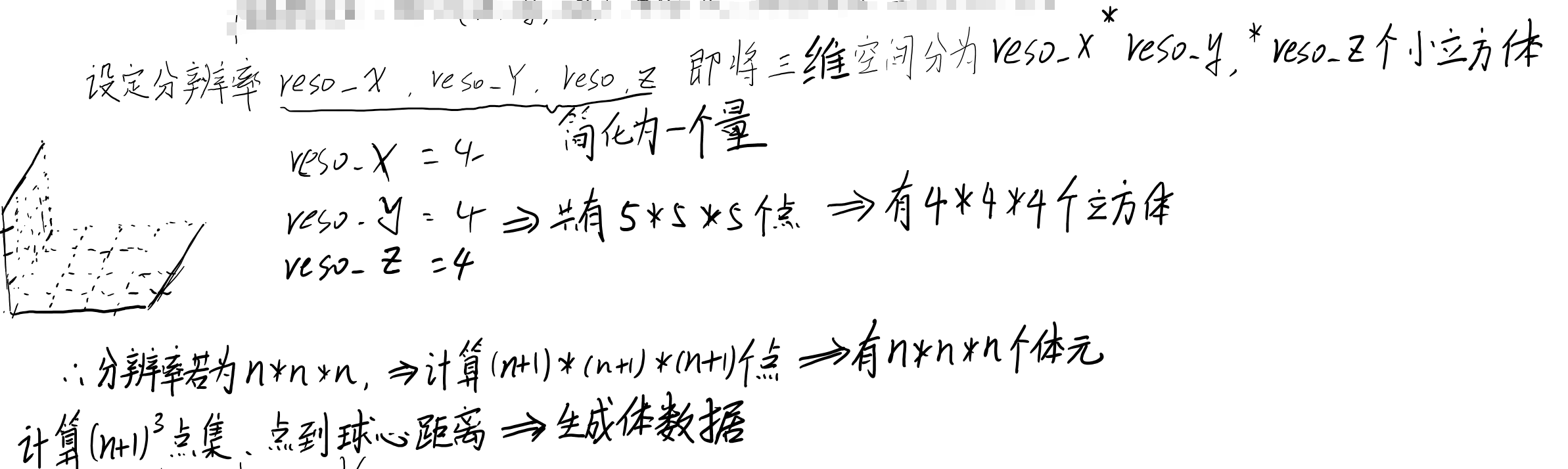
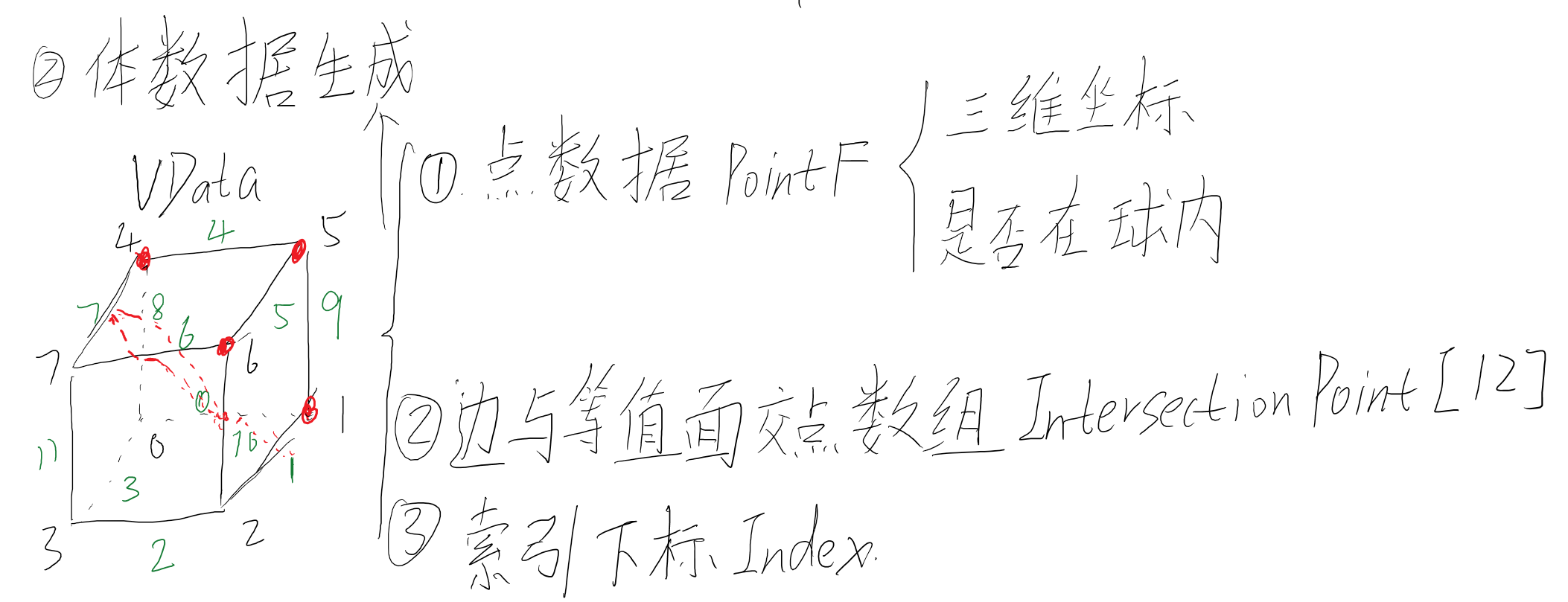
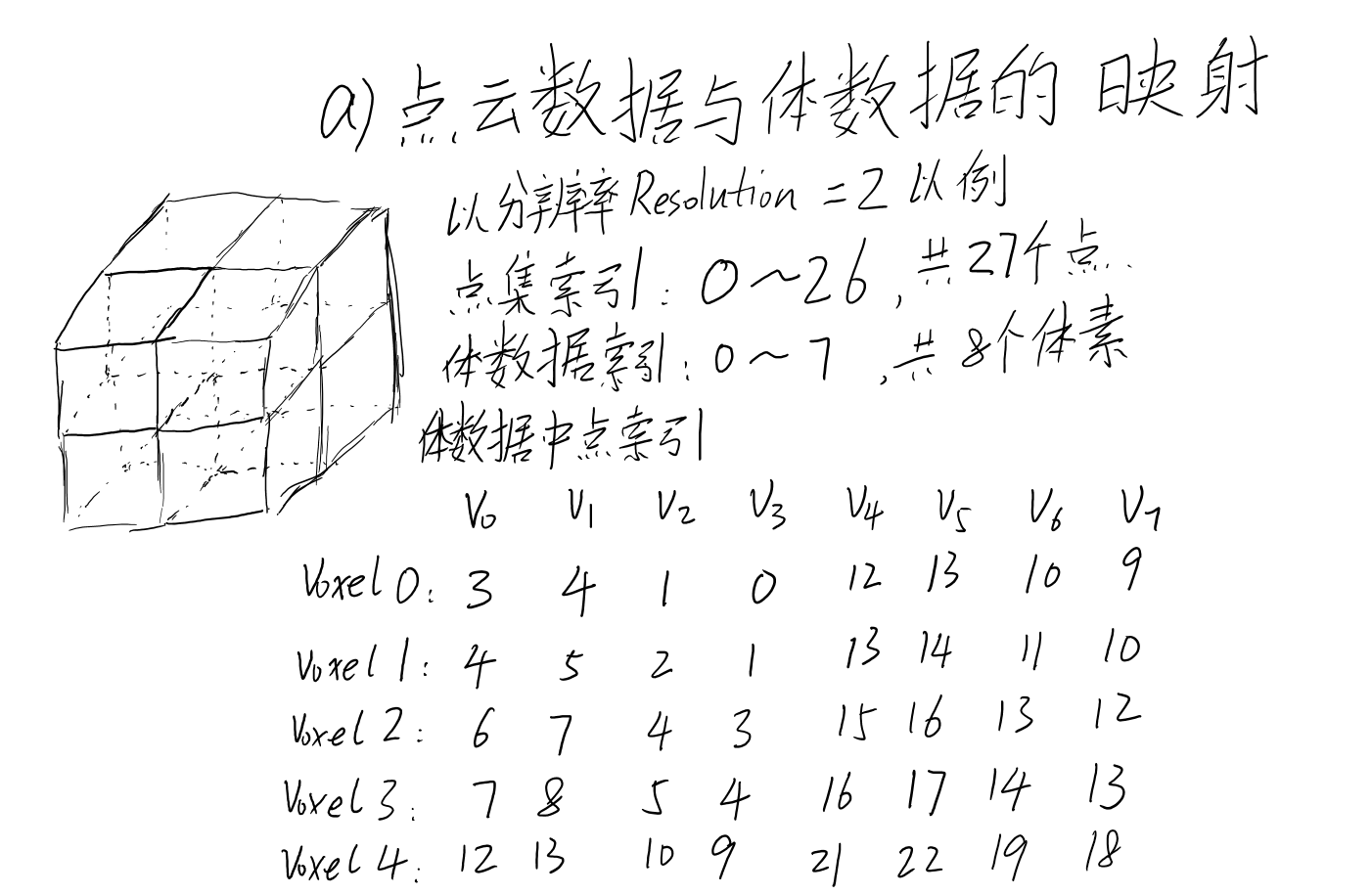
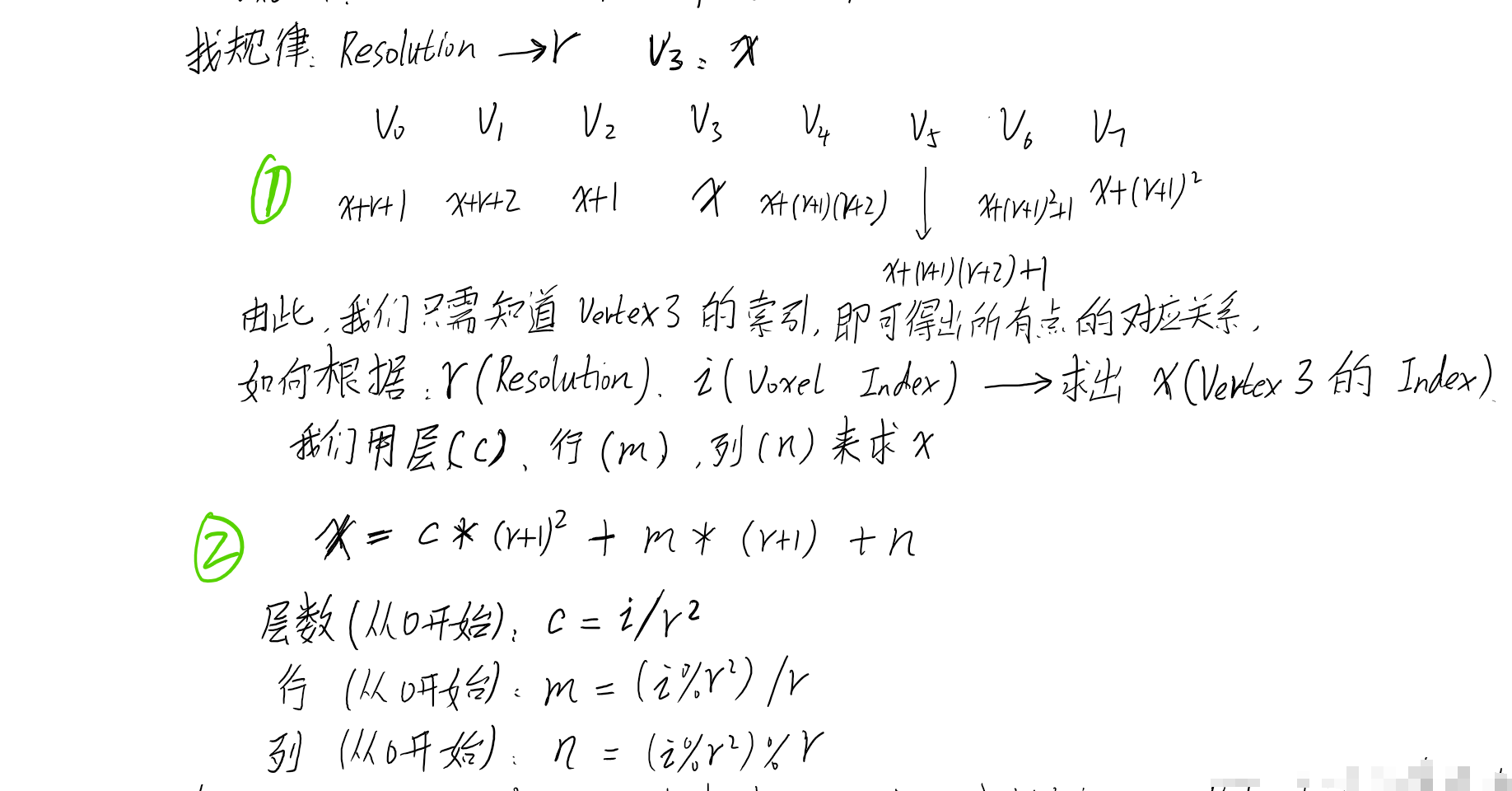
- 点云数据向体数据转换
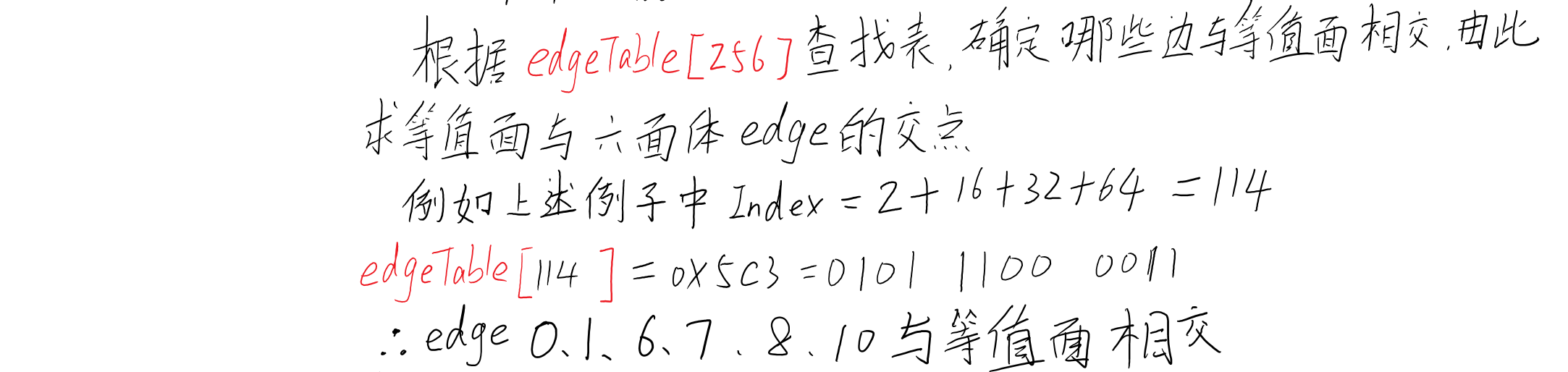
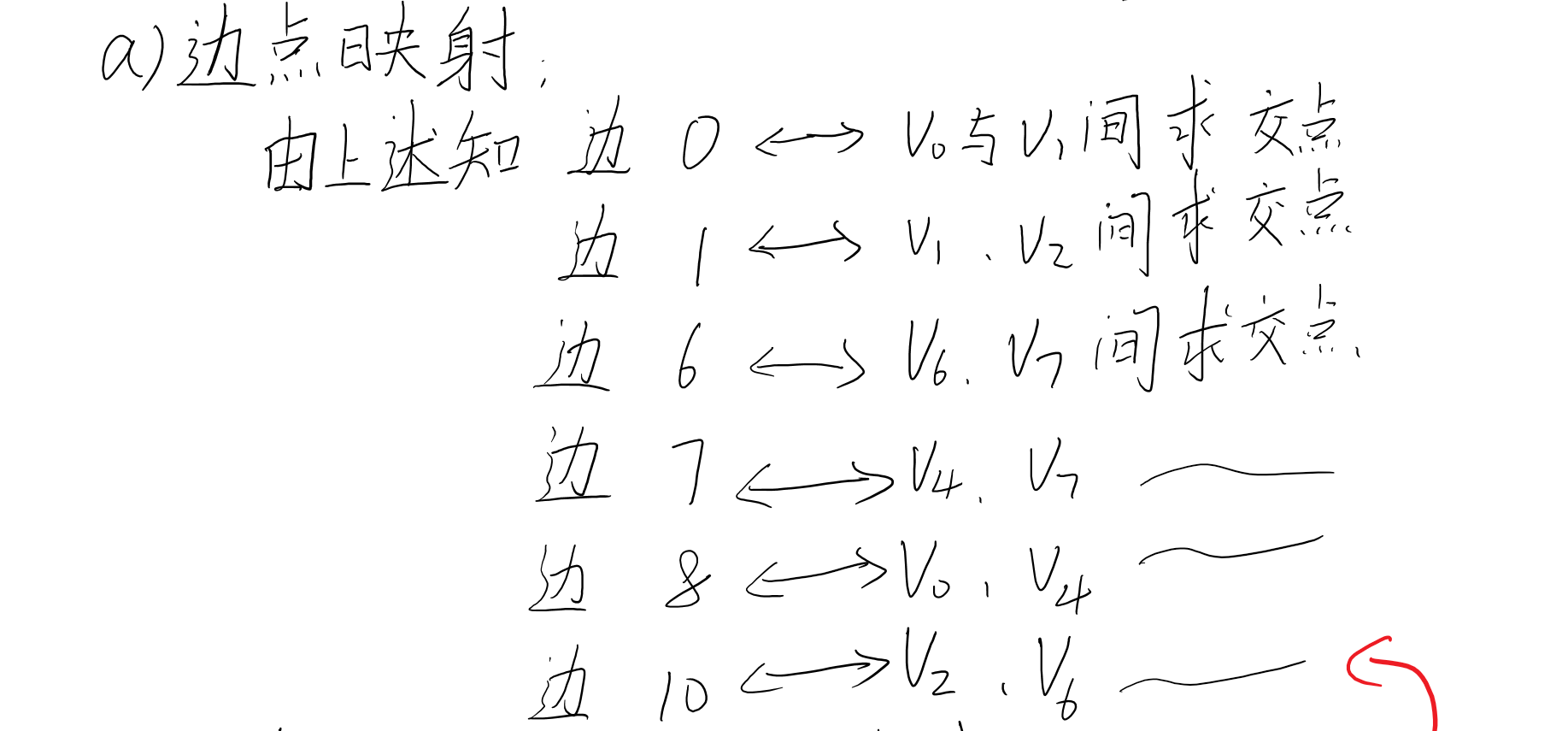
- 求六面体体素棱边与等值面的交点,构成等值面
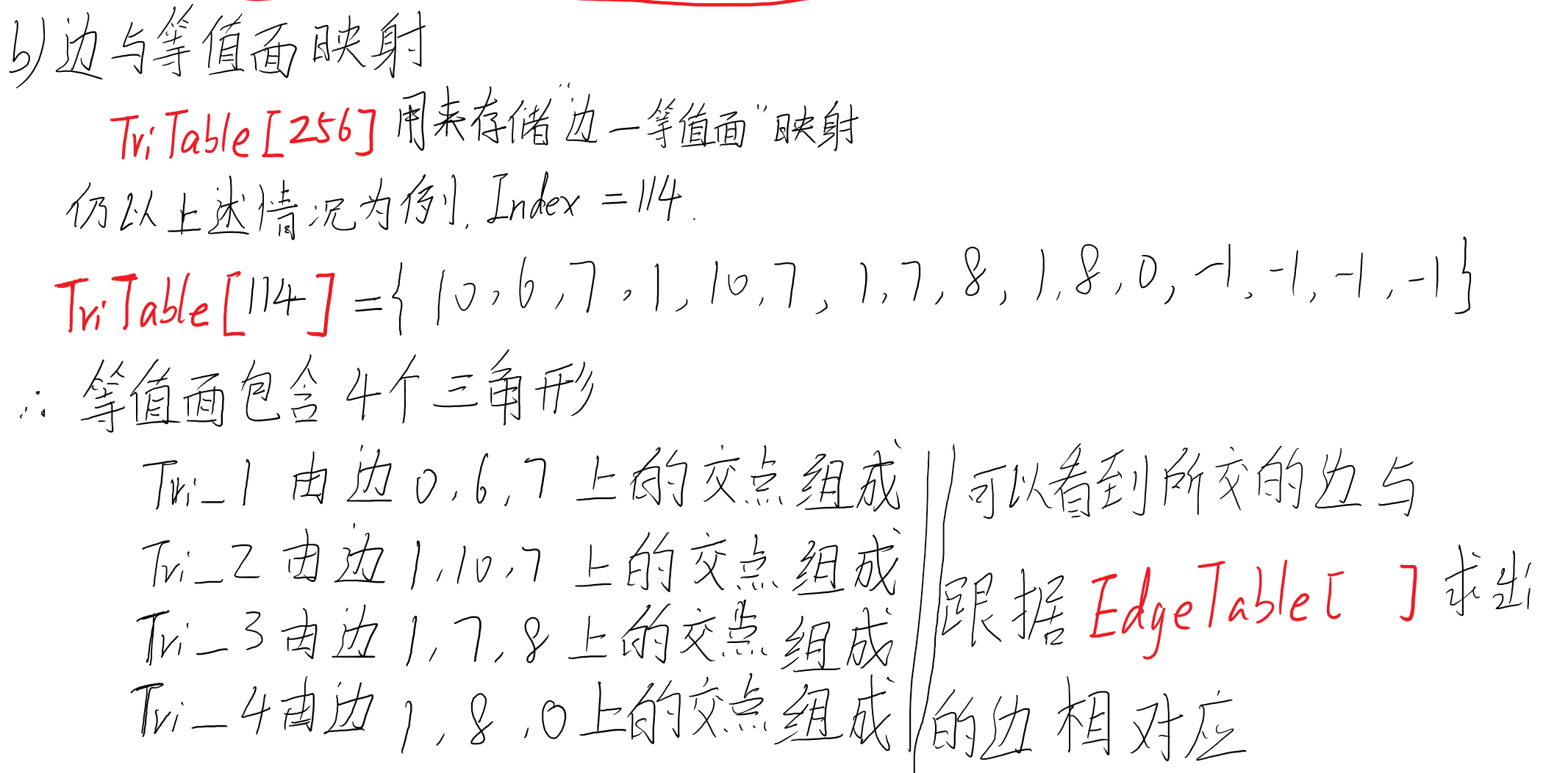
- 等值面的三角形表示
笔记

效果
代码
PointF.h
#pragma once
#include
#include
#include<GL/glew.h>
#include<GL/freeglut.h>
using namespace std;
#pragma comment(lib, "glew32.lib")
class PointF{
private :
float x, y, z; //三维点坐标
bool isInsideSphere; //该点是否在球内的标记
public:
PointF();
~PointF();
PointF(float x, float y, float z);
float GetX();
float GetY();
float GetZ();
bool GetIsInsideSphere();
void SetIsInsideSphere(PointF cSphere, float R);
};
PointF.cpp
#include "PointF.h"
PointF::PointF() {
x = 0.0f;
y = 0.0f;
z = 0.0f;
isInsideSphere = false;
}
PointF::~PointF() {}
PointF::PointF(float x, float y, float z) {
this->x = x;
this->y = y;
this->z = z;
}
float PointF::GetX() {
return x;
}
float PointF::GetY() {
return y;
}
float PointF::GetZ() {
return z;
}
bool PointF::GetIsInsideSphere() {
return isInsideSphere;
}
void PointF::SetIsInsideSphere(PointF cSphere, float R) {
float xx = cSphere.GetX() - x;
float yy = cSphere.GetY() - y;
float zz = cSphere.GetZ() - z;
float dis = xx * xx + yy * yy + zz * zz;
float RR = R * R;
if (RR > dis)
isInsideSphere = true;
else
isInsideSphere = false;
}
VData.h
#pragma once
#include"PointF.h"
class Voxel {
private :
PointF iVertex[8]; //六面体体素的8个顶点
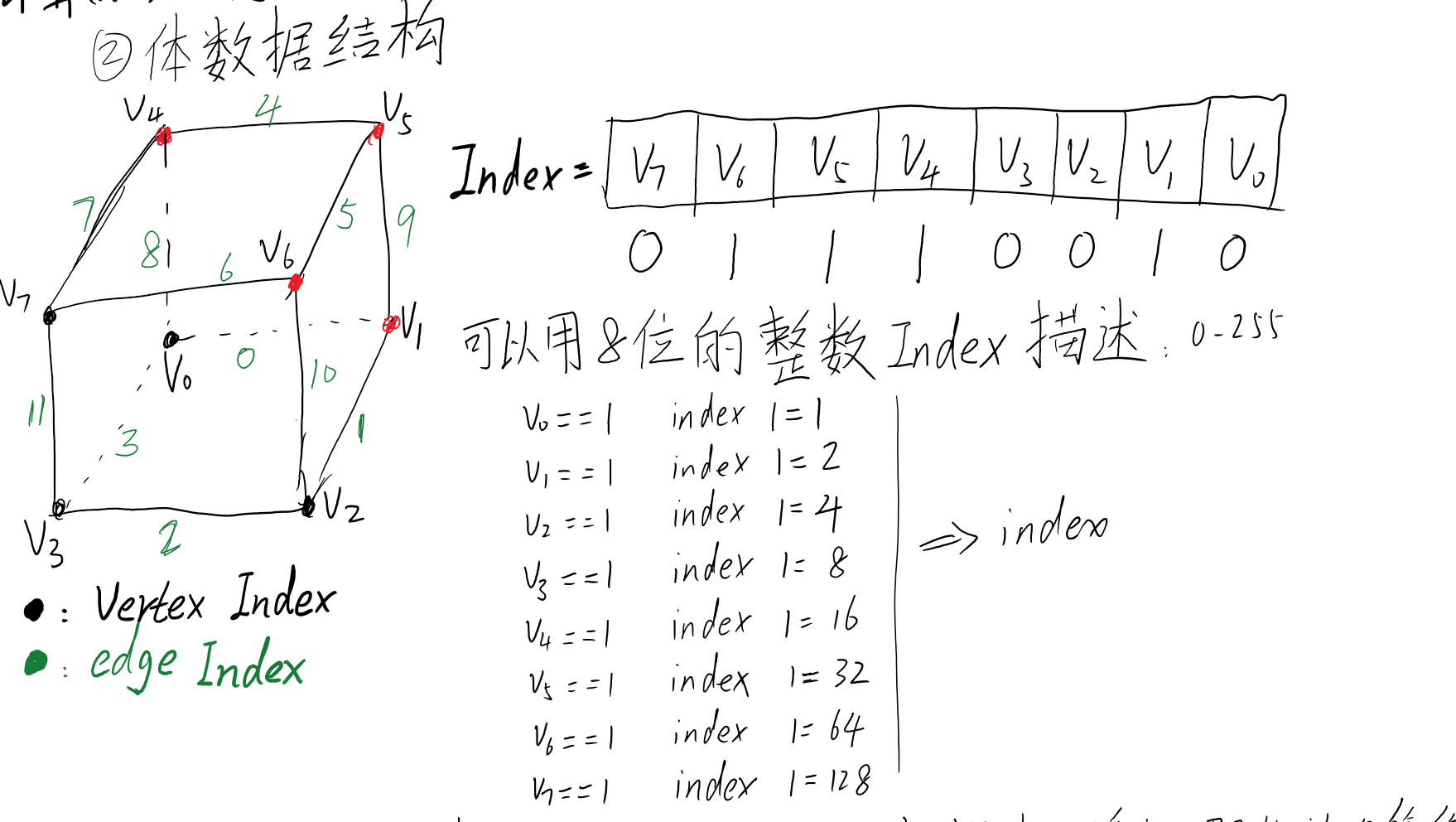
int iIndex; //六面体根据顶点数据生成的EdgeTable和TriTable的下标
PointF iIntersectVertex[12]; //六面体12条棱边与等值面的交点
public:
Voxel();
~Voxel();
void SetVertex(PointF p, int index);
PointF GetVertex(int index);
void CalculateiIndex();
void CalculateIntersectVertex();
void DrawWireCubes();
void DrawISOSurface();
};
VData.cpp
#include "VData.h"
#include "PointF.h"
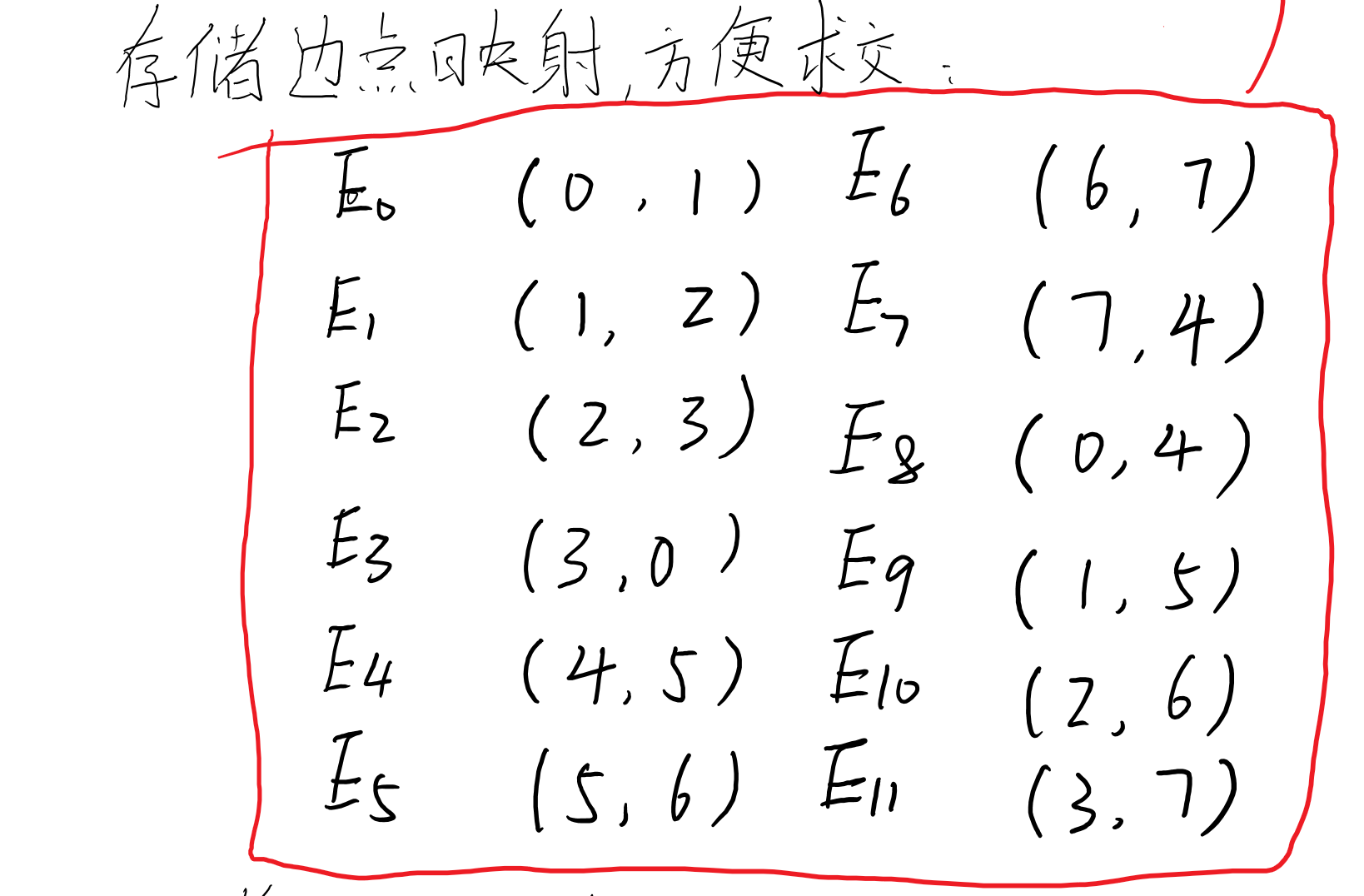
//点与边的关系
int vertexTable[12][15] = {
{ 0,1 },
{ 1,2 },
{ 2,3 },
{ 3,0 },
{ 4,5 },
{ 5,6 },
{ 6,7 },
{ 7,4 },
{ 0,4 },
{ 1,5 },
{ 2,6 },
{ 3,7 } };
//哪些边会与等值面相交
int edgeTable[256] = {
0x0 , 0x109, 0x203, 0x30a, 0x406, 0x50f, 0x605, 0x70c,
0x80c, 0x905, 0xa0f, 0xb06, 0xc0a, 0xd03, 0xe09, 0xf00,
0x190, 0x99 , 0x393, 0x29a, 0x596, 0x49f, 0x795, 0x69c,
0x99c, 0x895, 0xb9f, 0xa96, 0xd9a, 0xc93, 0xf99, 0xe90,
0x230, 0x339, 0x33 , 0x13a, 0x636, 0x73f, 0x435, 0x53c,
0xa3c, 0xb35, 0x83f, 0x936, 0xe3a, 0xf33, 0xc39, 0xd30,
0x3a0, 0x2a9, 0x1a3, 0xaa , 0x7a6, 0x6af, 0x5a5, 0x4ac,
0xbac, 0xaa5, 0x9af, 0x8a6, 0xfaa, 0xea3, 0xda9, 0xca0,
0x460, 0x569, 0x663, 0x76a, 0x66 , 0x16f, 0x265, 0x36c,
0xc6c, 0xd65, 0xe6f, 0xf66, 0x86a, 0x963, 0xa69, 0xb60,
0x5f0, 0x4f9, 0x7f3, 0x6fa, 0x1f6, 0xff , 0x3f5, 0x2fc,
0xdfc, 0xcf5, 0xfff, 0xef6, 0x9fa, 0x8f3, 0xbf9, 0xaf0,
0x650, 0x759, 0x453, 0x55a, 0x256, 0x35f, 0x55 , 0x15c,
0xe5c, 0xf55, 0xc5f, 0xd56, 0xa5a, 0xb53, 0x859, 0x950,
0x7c0, 0x6c9, 0x5c3, 0x4ca, 0x3c6, 0x2cf, 0x1c5, 0xcc ,
0xfcc, 0xec5, 0xdcf, 0xcc6, 0xbca, 0xac3, 0x9c9, 0x8c0,
0x8c0, 0x9c9, 0xac3, 0xbca, 0xcc6, 0xdcf, 0xec5, 0xfcc,
0xcc , 0x1c5, 0x2cf, 0x3c6, 0x4ca, 0x5c3, 0x6c9, 0x7c0,
0x950, 0x859, 0xb53, 0xa5a, 0xd56, 0xc5f, 0xf55, 0xe5c,
0x15c, 0x55 , 0x35f, 0x256, 0x55a, 0x453, 0x759, 0x650,
0xaf0, 0xbf9, 0x8f3, 0x9fa, 0xef6, 0xfff, 0xcf5, 0xdfc,
0x2fc, 0x3f5, 0xff , 0x1f6, 0x6fa, 0x7f3, 0x4f9, 0x5f0,
0xb60, 0xa69, 0x963, 0x86a, 0xf66, 0xe6f, 0xd65, 0xc6c,
0x36c, 0x265, 0x16f, 0x66 , 0x76a, 0x663, 0x569, 0x460,
0xca0, 0xda9, 0xea3, 0xfaa, 0x8a6, 0x9af, 0xaa5, 0xbac,
0x4ac, 0x5a5, 0x6af, 0x7a6, 0xaa , 0x1a3, 0x2a9, 0x3a0,
0xd30, 0xc39, 0xf33, 0xe3a, 0x936, 0x83f, 0xb35, 0xa3c,
0x53c, 0x435, 0x73f, 0x636,  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









