







其中O-XY为图像像素坐标系,而C-XYZ为摄像机坐标系。
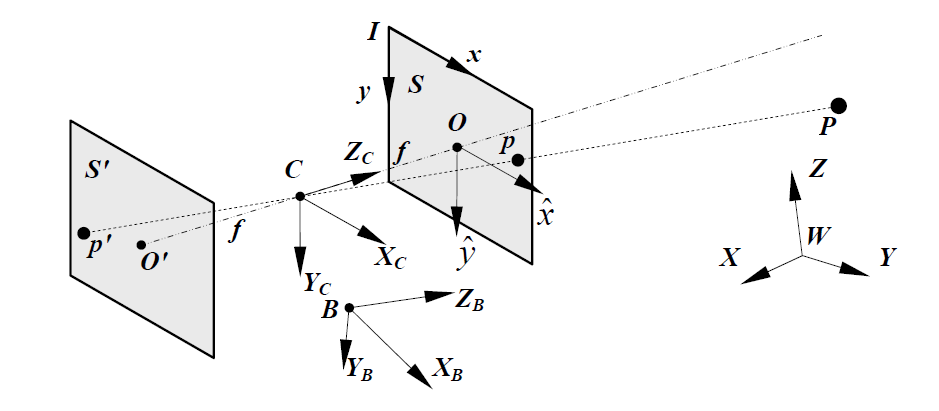
图1 图像像素坐标系和摄像机坐标系示意图
他们的转换关系如下:
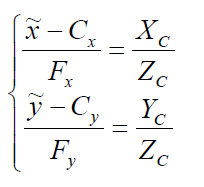
建立如下坐标系:
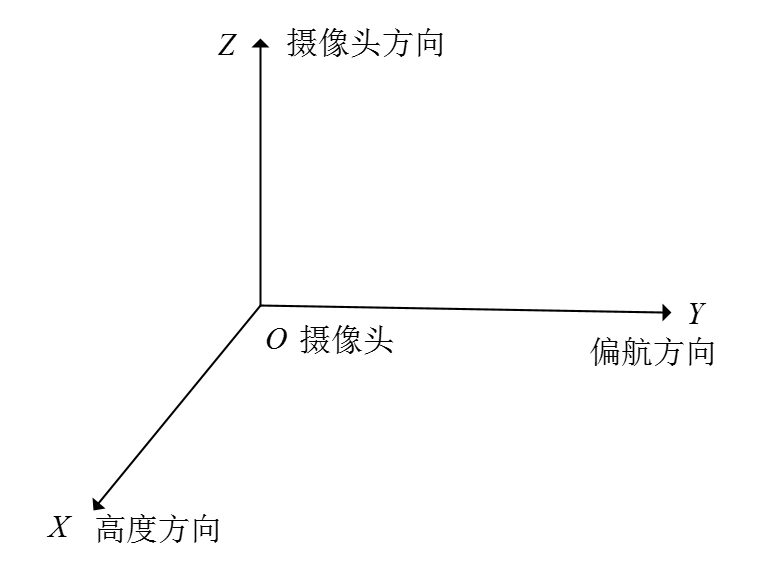
图2 摄像机坐标系示意图
其中设置摄像头的角度为向下倾斜45度,那么地面上的P2正好能够投影在摄像头CMOS平面上的正中央P2’点,如果物点离得太远或太近,则投影在CMOS平面的其他地方,甚至投影在CMOS平面之外。无人机在跟踪的时候,应该尽量保证物点的投影像点尽量保持在镜头所拍摄画面的中心。当跟踪目标为P1点时,无人机应当携带摄像头像Z轴的正方向进行运动。当目标为为P2点时,无人机应当向Z轴的负方向进行运动。
当投影点在图像的偏上或者偏下部位时,此时无人机应当向前后进行移动;而当投影点在图像的偏左或者偏右部位时,此时无人机应当旋转偏航角,在此方针进行分析时,仅先考虑前者情况。
图3 摄像机坐标系平面图
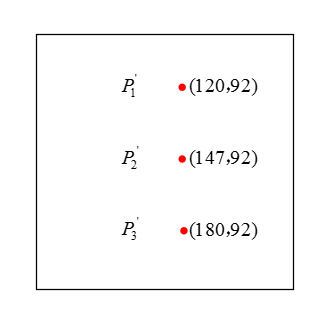
图4 拍摄所得的图像
所以应当仿真的函数功能为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3999
3999











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









