







大纲:
1.牛顿方法
2.指数簇
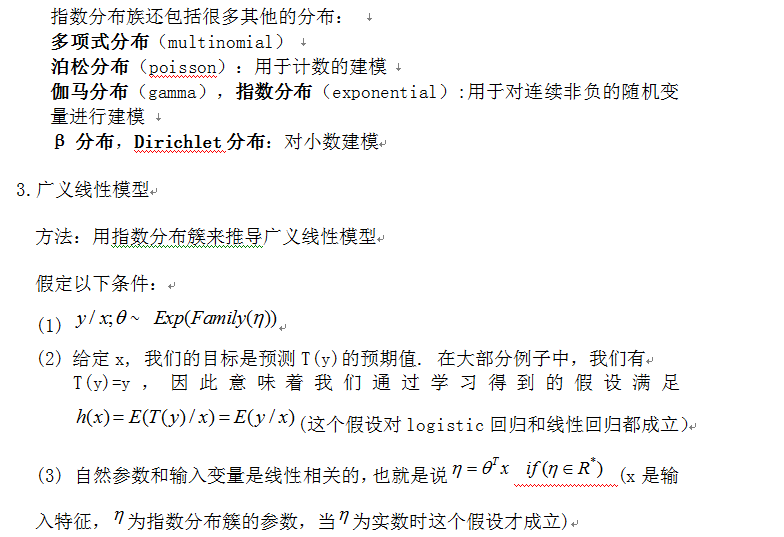
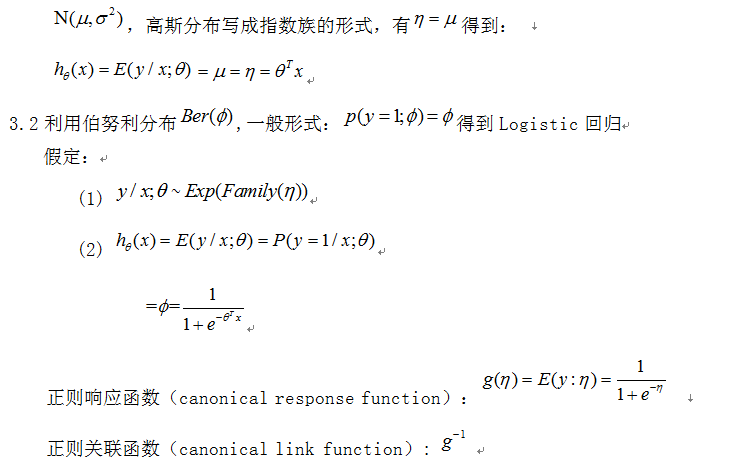
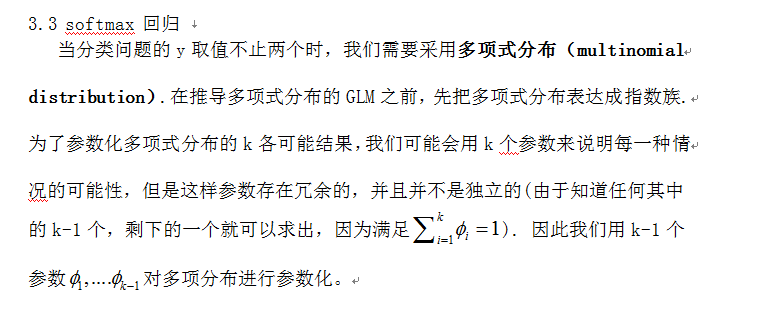
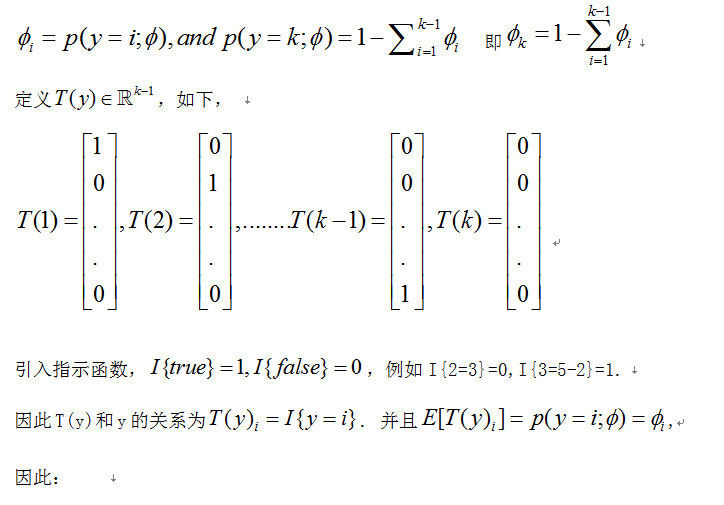
3:广义线性模型(GLM)
1.牛顿方法
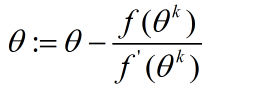
假设有函数:,我们希望找到满足



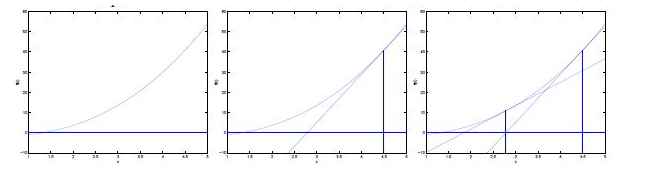
牛顿方法的过程:
1:先初始化
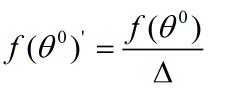
2:找到对应点(),在此点求切线,
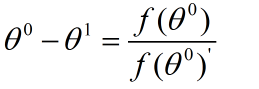
3:找到切线与x轴交点,作为,继续执行步骤2
4:直到找到
推理过程:
记,根据导数定义有:
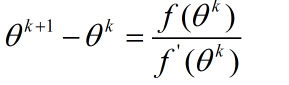

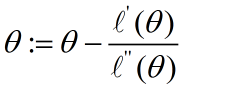
牛顿方法的一般化:
如果
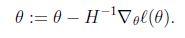
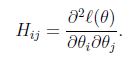
其中,


H称为海塞矩阵(Hessian matrix),是一个n*n的矩阵,n是特征量的个数,并且
牛顿方法比批处理梯度下降,梯度上升,梯度下降等的收敛速度快很多,很少次的迭代(十几次)就能够非常接近最小值了;但是因为每次迭代都要求海塞矩阵的值,当n很大时,求海塞矩阵的逆代价是很大的.
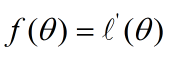
注:如果用牛顿方法求最小值的话,公式也不会改变
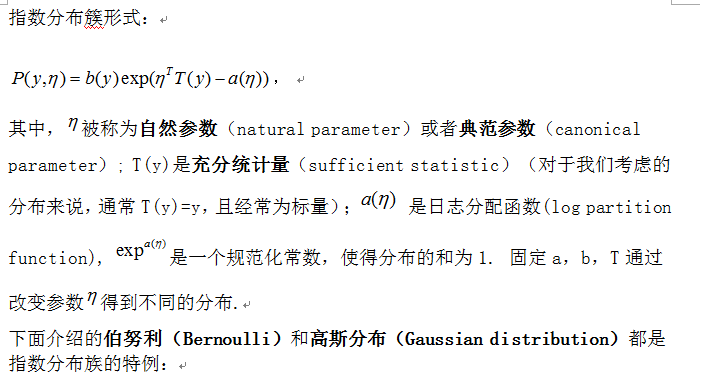
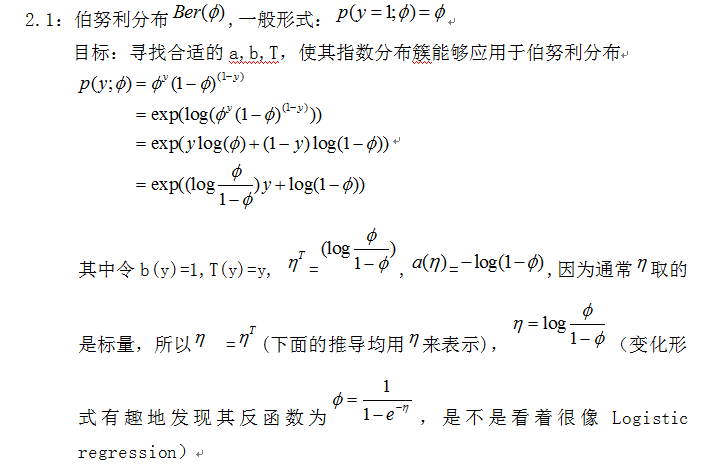
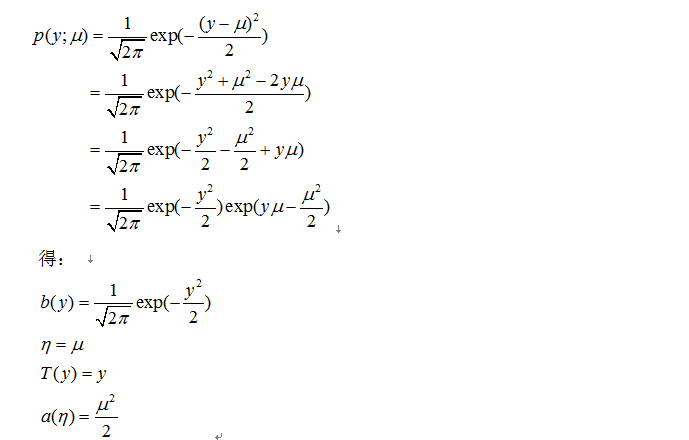
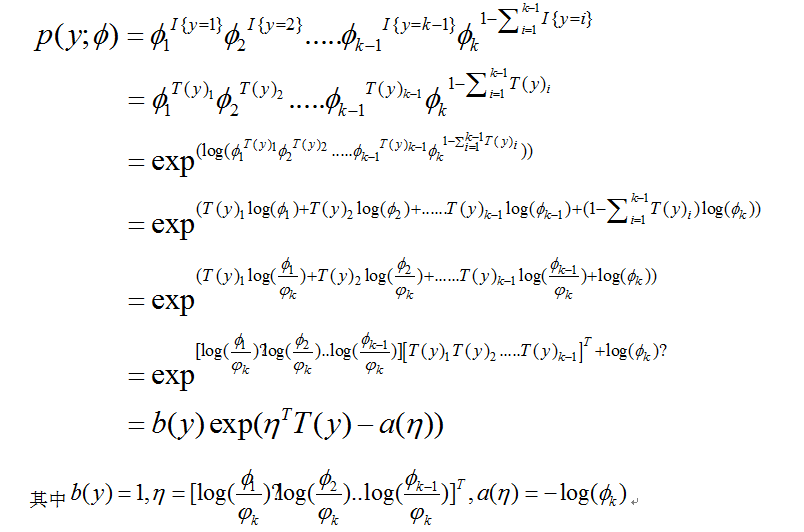
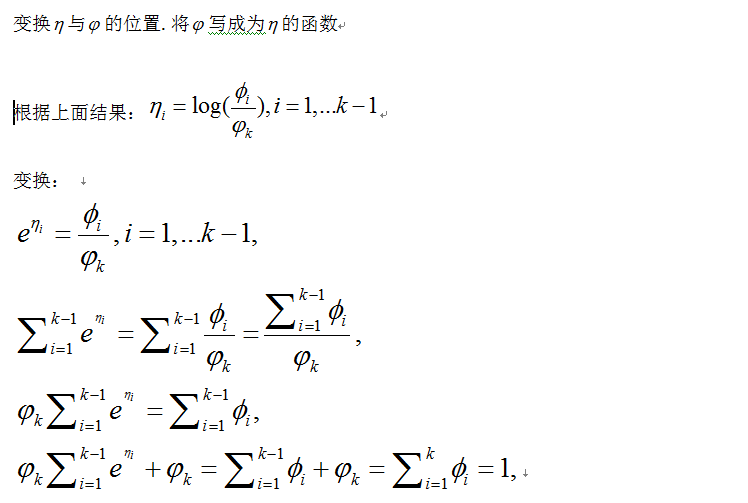
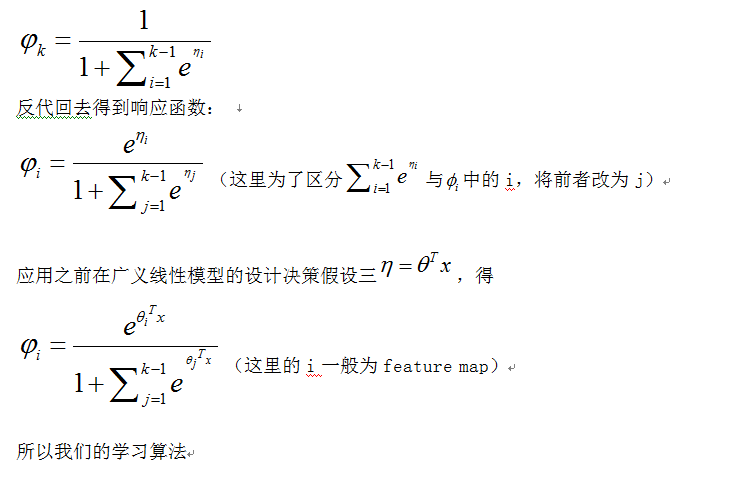
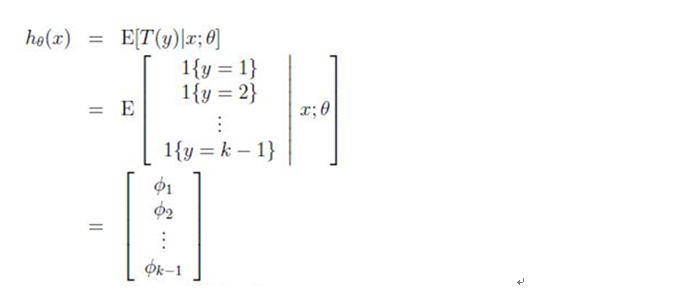
2.指数分布簇



以上均是自己所见,如果有错的地方欢迎指出哦















 473
473

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









