







今天又去那边测设备咬了好几个包,guoqi真是sb里面的人也太sb了闹心大老爷们拿嘴当屁股胡说,做程序员太弱势了还是sb项目经理产品经理好 就瞎胡沁就行
一、STM32平衡自行车
这是一个比较丑的自行车,,,

自行车平衡理论
模型分析
1 倒立摆
很显然我们知道自行车在左右方向上不稳定,这是一个很常见的物理模型——倒立摆。

顾名思义,倒立摆的意思就是倒着的摆,比如一个倒着的杆,
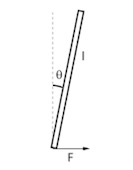
倒立摆的特性:不稳定,只要偏离平衡位置,就会有一个力(重力的分力)使系统更加偏离平衡位置,这样偏差就会越来越大。
一般倒立的杆在前后左右方向都有可能倒下,在二维的平面上不稳定;而自行车仅在左右方向上可能倒下,是一维的倒立摆,这要简单一些。
以下是几个生活中常见的倒立摆例子:

2 自行车的平衡控制
自行车属于倒立摆模型,倒立摆是不稳定的,那么倒立摆应该如何控制才能平衡呢?
我们把问题拆分一下:
-
怎样的状态才叫平衡?
-
我们能控制的是什么?
-
如何控制才能稳定平衡?
2.1 怎样的状态才叫平衡
我们要对”平衡”进行数学描述,所谓的平衡其实就是倒立摆的倾角稳定在一个我们想要的值。
通常我们想要平衡在θ = 0处。
2.2 我们能控制的是什么
对于倒立摆模型,通常我们能控制的是底端的力或速度或位置,不同的控制量对应的控制方法不同。
对于自行车来说,它的控制方式不像通常的倒立摆那样直接控制底部,而是间接地通过转向来控制,当自行车以一个固定的速度前进时,自行车把手以一定角度进行转向(设为α),自行车会做相应半径的圆周运动,产生相应大小的”离心力”。
在自行车这个费惯性系里看来,只要对把手进行一定角度的转向(α),就会产生一个相应大小的横向力:
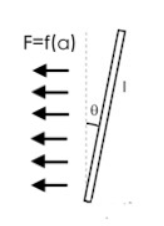
这就是我们进行平衡控制时的实际控制量——把手转角α,只要控制它就能控制回复力。
2.3 如何控制才能平衡
上面我们已经能够通过转向产生回复力,这个回复力可以把倒立摆”掰回”平衡位置,有往回掰的回复力就能稳定平衡
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1636
1636

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









