







去除垂直、水平等条纹杂讯的图像处理步骤
空间域的处理方法比较多,比如傅里叶变换和小波变换等。频域方法处理的一般步骤是:
① 将图像从空间域转换到频域;
② 在频域处理(挑选或剔除特定的频段);
③ 频域处理后再转换到空间域
傅里叶变换频域处理步骤:
① 图像做傅里叶变换--转换到频域;
② 在频域处理(对频谱图像处理,剔除不需要的频段);
③ 反傅里叶变换--转换到空间域;
④ 如果不能一次得到最终效果,可能还需要添加一些blob分析方法
傅里叶变换频域图特点:
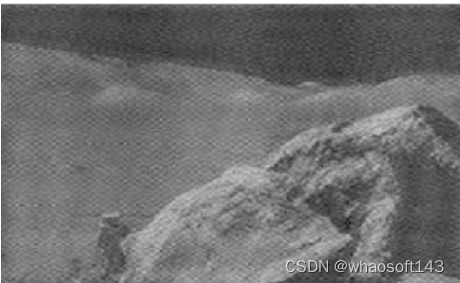
傅里叶变换理论与公式这里不做介绍,大家有兴趣自行搜索。先看下如下图片:
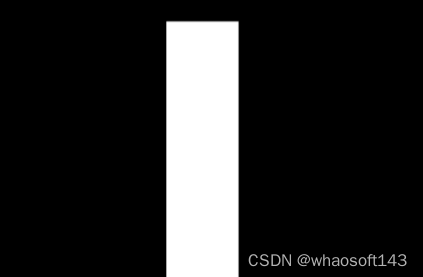
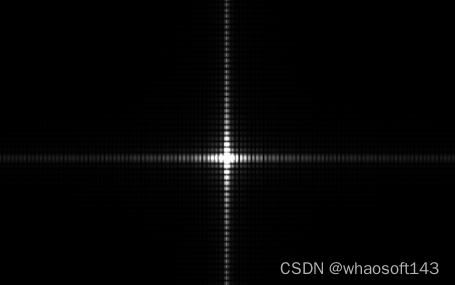
对应的使用fft_image()转换后的傅里叶频谱图像
read_image (Image, 'C:/Users/3252314061/Desktop/1.png')
fft_image (Image, ImageFFT) 
原图水平方向上变化更多,所以频谱图水平方向更亮。竖直方向变化不比水平方向多,所以较水平方向暗。下图正好相反:

傅里叶变换后的频谱图:
原图竖直方向上变化更多,所以频谱图竖直方向更亮。水平方向变化不比竖直方向多,所以较竖直方向暗。
fft_image()变换后频谱图像中心为低频部分,越往边缘是高频部分。
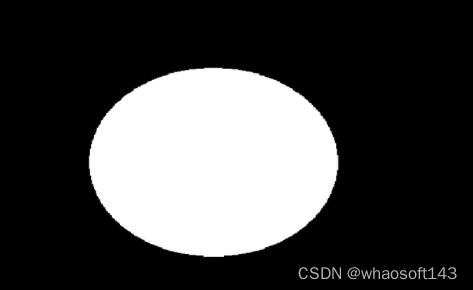
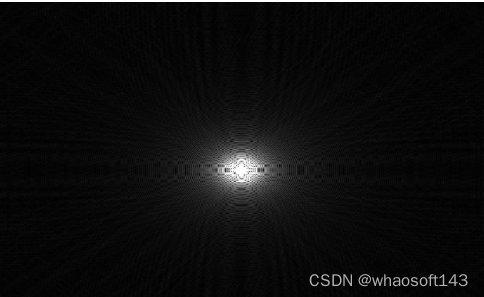
再看看下面的图像,频谱图变化也是沿着圆形的各个方向,反应像素灰度值的变化情况:
傅里叶变换去除图像条纹杂讯步骤:
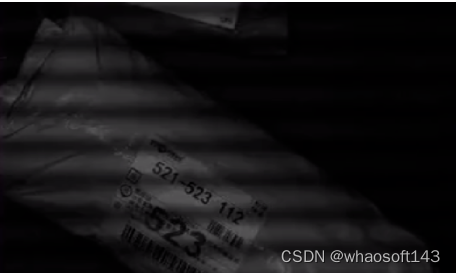
图1--竖直条纹杂讯:
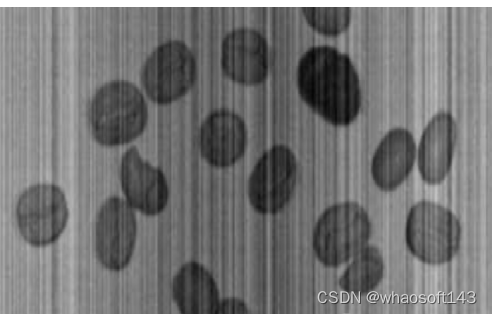
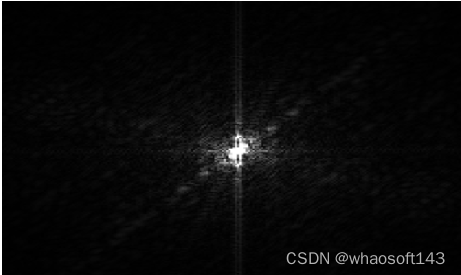
由观察可知,这幅图像有很多竖直条纹杂讯,沿水平方向变化较大,那么频谱图水平方向应该较亮,用fft_image()变换后效果:
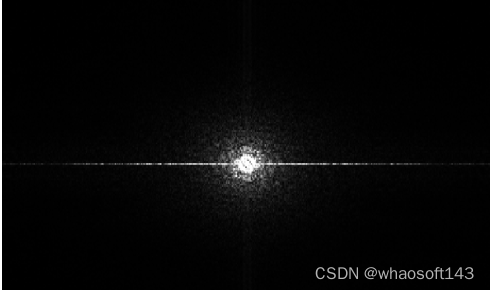
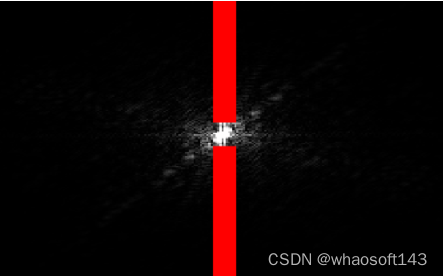
那么如果我们想去除竖直条纹,就可以将频谱图中水平的亮线条区域抹掉(用灰度值0填充),如下:
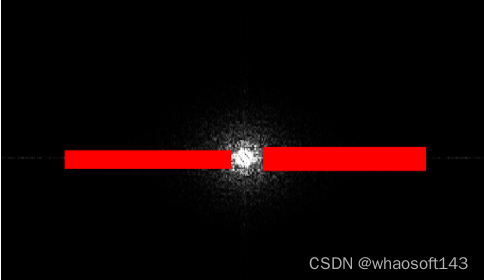
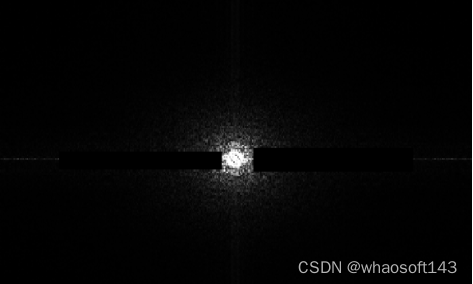
然后fft_image_inv()反傅里叶变换看下效果:
fft_image_inv (ImageResult, ImageFFTInv)
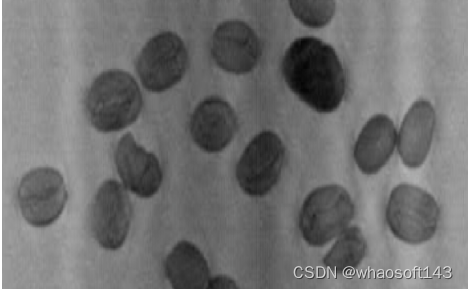
图2-水平条纹杂讯:
由观察可知,这幅图像有很多水平条纹杂讯,沿竖直方向变化较大,那么频谱图竖直方向应该较亮,用fft_image()变换后效果:
那么如果我们想去除水平条纹,就可以将频谱图中竖直的亮线条区域抹掉(用灰度值0填充),如下:
然后fft_image_inv()反傅里叶变换看下效果:

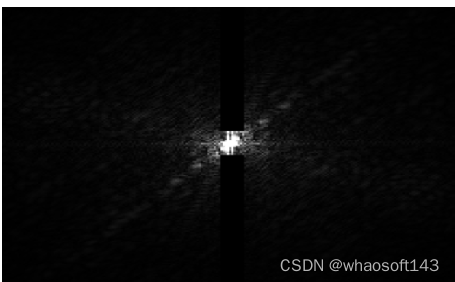
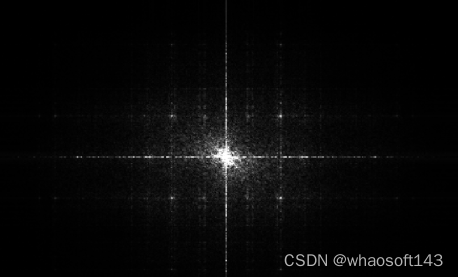
图3-水平垂直条纹杂讯:

傅里叶频谱图:
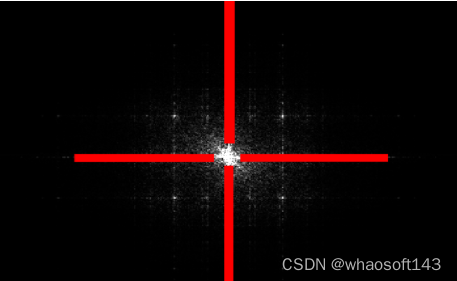
水平和竖直方向均抹除:
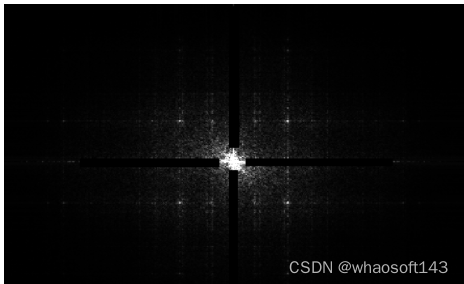
反傅里叶变换效果:
完整代码(Halcon实现):whaosoft aiot http://143ai.com
read_image (Image, './imgs/5.PNG')
rgb1_to_gray (Image, GrayImage)
fft_image (GrayImage, ImageFFT)
gen_rectangle1 (ROI_0, 2.97368, 217.535, 179.635, 227.458)
gen_rectangle1 (TMP_Region, 209.41, 217.535, 387.064, 226.465)
union2 (ROI_0, TMP_Region, ROI_0)
gen_rectangle1 (TMP_Region, 193.53, 234.404, 203.455, 374.316)
union2 (ROI_0, TMP_Region, ROI_0)
gen_rectangle1 (TMP_Region, 193.53, 74.6458, 204.447, 207.612)
union2 (ROI_0, TMP_Region, ROI_0)
paint_region (ROI_0, ImageFFT, ImageResult, 0, 'fill')
fft_image_inv (ImageResult, ImageFFTInv)
如果是彩色图,就先将彩图通道分离,在每个通道做傅里叶变换处理,然后反变换后合并通道即可。

















 1198
1198

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









