







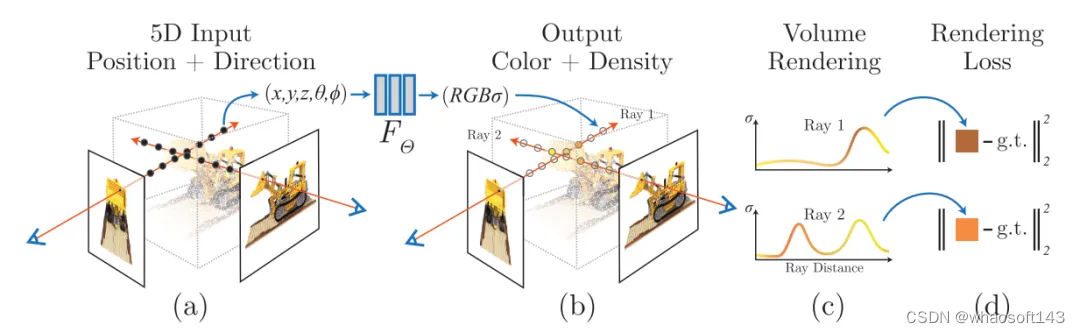
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis 是一篇获得ECCV2020 Best Paper Honorable Mention的论文。给定一个场景的多视角的图像,神经辐射场(NeRF)通过图像重建误差优化一个神经场景表征。优化后可以实现逼真的新视角合成效果。被其逼真的图像合成效果所吸引,很多研究人员开始跟进该方向,并在最近的一两年时间里产生了大量的(好几百篇!)改进和拓展工作。
为什么写这篇文章
网上已经有不少介绍NeRF的文章,这些文章很好地介绍了NeRF论文的核心思想,体素渲染的细节,网络结构,优化策略等等。我这里主要介绍代码实现中关于相机参数以及坐标系变换相关的内容,这个地方是我觉得初学者容易困惑的地方,特别是没有3D知识基础的读者。
本文的代码讲解以pytorch版本的实现为例:https://github.com/yenchenlin/nerf-pytorch。这里假设读者已经看过NeRF论文,并且简单浏览过NeRF的代码。
总体概览
NeRF的技术其实很简洁,并不复杂。但与2D视觉里考虑的2维图像不同,NeRF考虑的是一个3D空间。下面列的是NeRF实现的几个关键部分:
-
有一个3D空间,用一个连续的场表示
-
空间里存在一个感兴趣的物体区域
-
处于不同位置和朝向的相机拍摄多视角图像
-
对于一张图像,根据相机中心和图像平面的一个像素点,两点确定一条射线穿过3D空间
-
在射线上采样多个离散的3D点并利用体素渲染像素的颜色。
这里面涉及到3D空间、物体区域、相机位置和朝向、图像、射线、以及3D采样点等。要想优化NeRF,我们需要能够表达刚刚提到的这些东西。
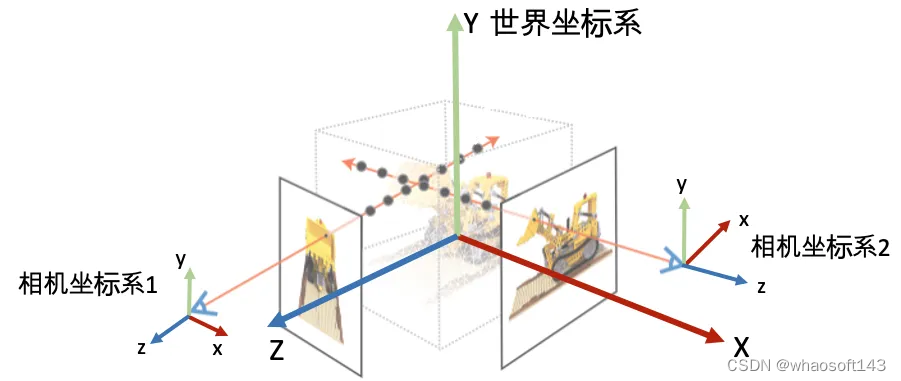
坐标系定义: 为了唯一地描述每一个空间点的坐标,以及相机的位置和朝向,我们需要先定义一个世界坐标系。一个坐标系其实就是由原点的位置与XYZ轴的方向决定。接着,为了建立3D空间点到相机平面的映射关系以及多个相机之间的相对关系,我们会对每一个相机定义一个局部的相机坐标系。下图为常见的坐标系定义习惯。
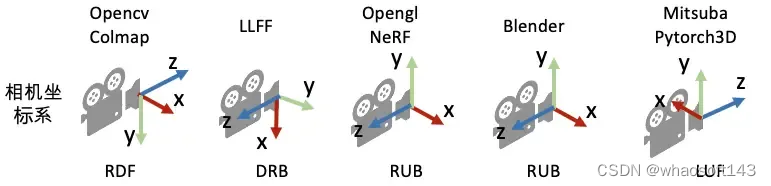
常见的相机坐标系定义习惯(右手坐标系)。注意:在OpenCV/COLMAP的相机坐标系里相机朝向+z轴,在LLFF/NeRF的相机坐标系中里相机朝向-z轴。有时我们会按坐标系的xyz朝向描述坐标系,如OpenCV/COLMAP里使用的RDF表述X轴指向right,Y轴指向Down,Z轴指向Foward。
相机的内外参数
相机的位置和朝向由相机的外参(extrinsic matrix)决定,投影属性由相机的内参(intrinsic matrix)决定。
注意:接下来的介绍假设矩阵是列矩阵(column-major matrix),变换矩阵左乘坐标向量实现坐标变换(这也是OpenCV/OpenGL/NeRF里使用的形式)。
相机外参
相机外参是一个4x4矩阵,其作用是将世界坐标系的点变换到相机坐标系下。我们也把相机外参叫做world-to-camera (w2c)矩阵。(注意用的是4维的齐次坐标,如果不了解齐次坐标系请自行查阅相关资料。)
相机外参的逆矩阵被称为camera-to-world (c2w)矩阵,其作用是把相机坐标系的点变换到世界坐标系。因为NeRF主要使用c2w,这里详细介绍一下c2w的含义。c2w矩阵是一个4x4的矩阵,左上角3x3是旋转矩阵R,右上角的3x1向量是平移向量T。有时写的时候可以忽略最后一行[0,0,0,1]。

Camera-to-world (c2w) 矩阵
刚刚接触的时候,对这个c2w矩阵的值可能会比较陌生。其实c2w矩阵的值直接描述了相机坐标系的朝向和原点:
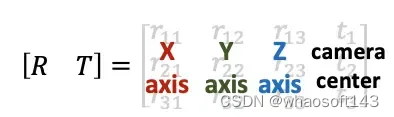
理解Camera-to-world (c2w)矩阵
具体的,旋转矩阵的第一列到第三列分别表示了相机坐标系的X, Y, Z轴在世界坐标系下对应的方向;平移向量表示的是相机原点在世界坐标系的对应位置。
如果这段描述还是有点抽象,可以尝试进行下列计算帮助自己理解。刚刚讲到c2w是将相机坐标系的向量变换到世界坐标系下,那我们如果将c2w作用到(即左乘)相机坐标系下的X轴[1,0,0,0],Y轴[0,1,0,0], Z轴[0,0,1,0],以及原点[0,0,0,1](注意方向向量的齐次坐标第四维等于0,点坐标第四维等于1),我们会得到它们在世界坐标系的坐标表示:
[R, T][1, 0, 0, 0]^T = [r11, r21, r31]^T # X轴对应的是c2w矩阵的第一列
[R, T][0, 1, 0, 0]^T = [r12, r22, r32]^T # Y轴对应的是c2w矩阵的第二列
[R, T][0, 0, 1, 0]^T = [r13, r23, r33]^T # Y轴对应的是c2w矩阵的第三列
[R, T][0, 0, 0, 1]^T = [t1, t2, t3]^T # 原点对应的是c2w矩阵的第四列从上面可以看到可以看到,将c2w作用到相机坐标系下的X轴、Y轴、 Z轴、以及原点我们会依次得到c2w的四列向量。
相机内参
刚刚介绍了相机的外参,现在简单介绍一下相机的内参。
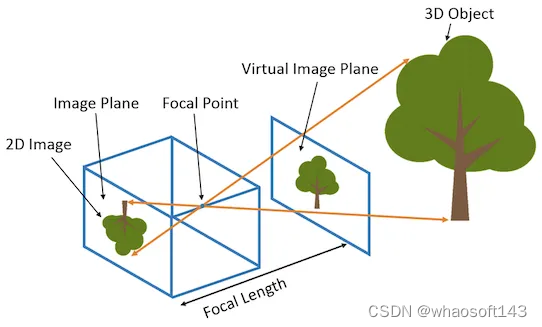
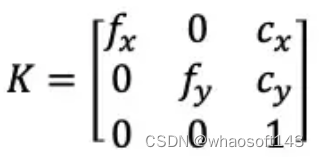
相机的内参矩阵将相机坐标系下的3D坐标映射到2D的图像平面,这里以针孔相机(Pinhole camera)为例介绍相机的内参矩阵K:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1248
1248

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









