






最近在研究orb slam,发现经常出现特征点跟丢情况,打算slam中VO中的特征提取方式用深度学习模型去尝试,首先需要提取出比较准确的特征点.废话不多说直接上代码:
cv::Ptr<cv::ORB> orb=cv::ORB::create();
std::vector<cv::KeyPoint>keypoints1,keypoints2;
cv::Mat descriptors1,descriptors2;
orb->detectAndCompute(img_left,cv::Mat(),keypoints1,descriptors1);
orb->detectAndCompute(img_right,cv::Mat(),keypoints2,descriptors2);
cv::Mat showKeypoints1,showKeypoints2;
cv::drawKeypoints(img_left,keypoints1,showKeypoints1);
cv::drawKeypoints(img_right,keypoints2,showKeypoints2);
std::vector<cv::DMatch>matches;
cv::Ptr<cv::DescriptorMatcher>matcher=cv::DescriptorMatcher::create("BruteForce-Hamming");
matcher->match(descriptors1,descriptors2,matches);
double min_dist=0,max_dist=0;
for (int i = 0; i <descriptors1.rows ; ++i) {
double dist=matches[i].distance;
if(dist<min_dist)min_dist=dist;
if(dist>max_dist)max_dist=dist;
}
std::vector<cv::DMatch>good_matches;
for (int j = 0; j <descriptors1.rows ; ++j) {
if(matches[j].distance <= std::max(2*min_dist,25.0)){
good_matches.push_back(matches[j]);
}
}
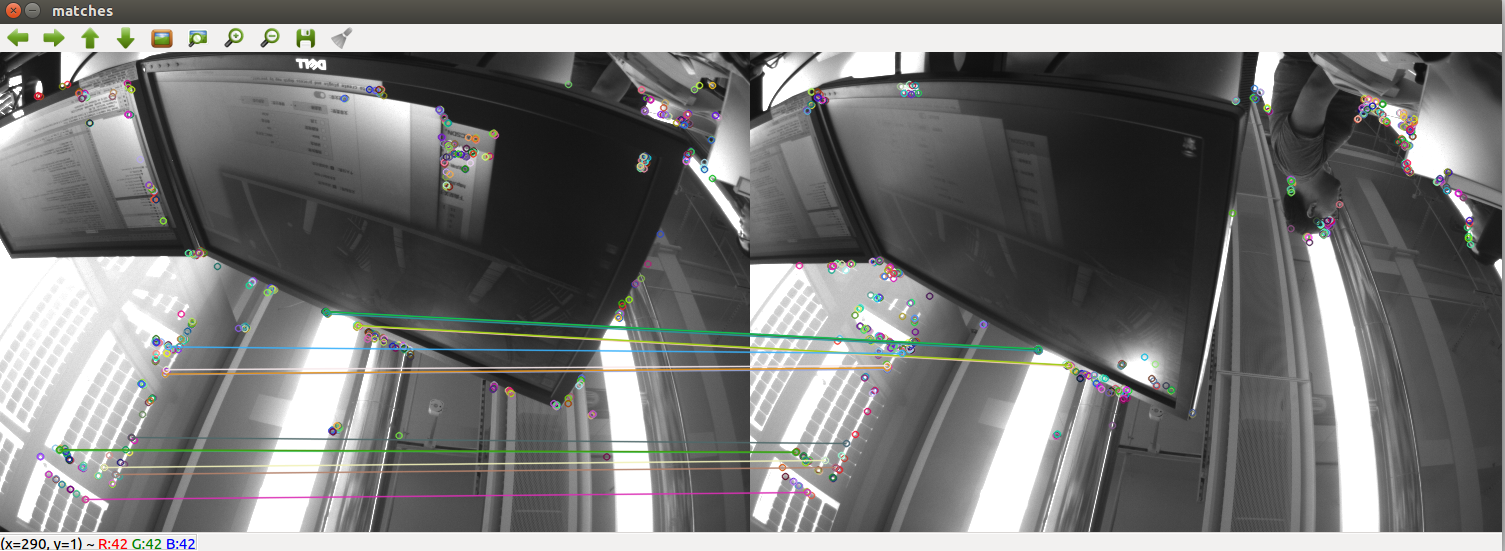
cv::Mat showMatches;
cv::drawMatches(img_left,keypoints1,img_right,keypoints2,good_matches,showMatches);
cv::imshow("matches",showMatches);
cv::waitKey();步骤:
1:检测角点位置并计算描述子
2:对描述子进行匹配
3:遍历matches数组,找出距离的最大值和最小值;
4:根据最小距离对匹配点进行筛选
5:绘制匹配结果
6.打印出匹配点和保存图片已备后面训练用















 2648
2648











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









