







 超级会员免费看
超级会员免费看
ORB:Oriented FAST and Rotated BRIE
ORB特征是将FAST特征点的检测方法与BRIEF特征描述子结合起来,并在它们原来的基础上做了改进与优化:
- 使用非最大值抑制,在一定区域内仅仅保留响应极大值的角点,避免FAST提取到的角点过于集中。FAST提取到的角点数量过多且不是很稳定,ORB中可以指定需要提取到的角点的数量N,然后对FAST提取到的角点分别计算Harris响应值,选择前N个具有最大响应值的角点作为最终提取到的特征点集合。
- FAST提取到的角点不具有尺度信息,在ORB中使用图像金字塔,并且在每一层金字塔上检测角点,以此来保持尺度的不变性。
- FAST提取到的角点不具有方向信息,在ORB中使用灰度质心法(Intensity Centroid)来保持特征的旋转不变性。
其中:
(1)FAST Features From Accelerated Segment Test
以速度快而著称,检测局部像素灰度变化明显的地方,
FAST算法提取角点的步骤:
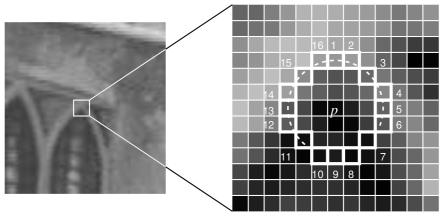
在图像中选择像素p,假设其灰度值为:Ip
设置一个阈值T,例如:Ip的20%
选择p周围半径为3的圆上的16个像素,作为比较像素
假设选取的圆上有连续的N个像素大于Ip+T或者Ip−T,那么可以认为像素p就是一个特征点。(N通常取12,即为FAST-12;常用的还有F

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 5787
5787

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











