









1.安装:
sudo apt-get install qtcreator2.配置
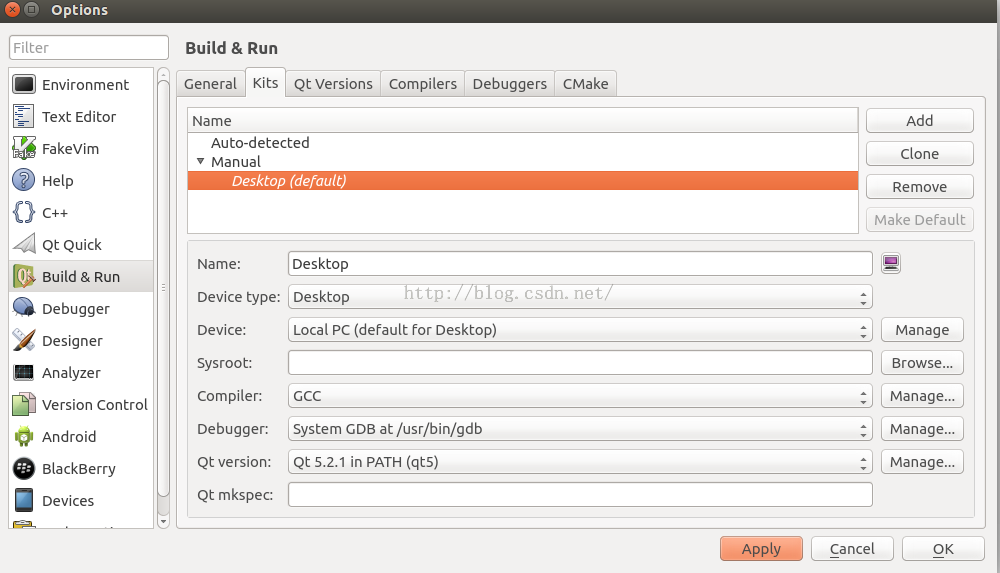
①.打开qt->Tools->Options->Build&Run
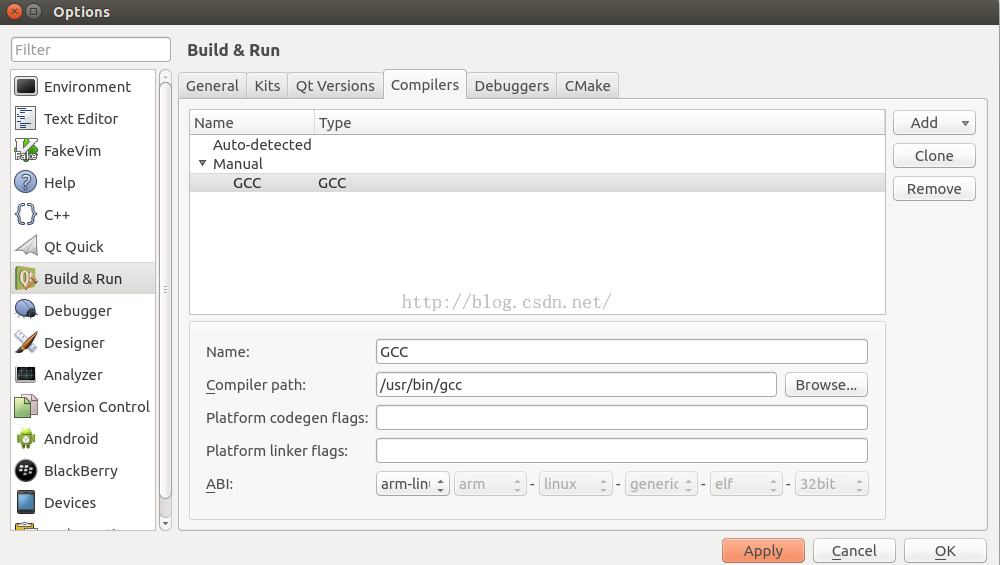
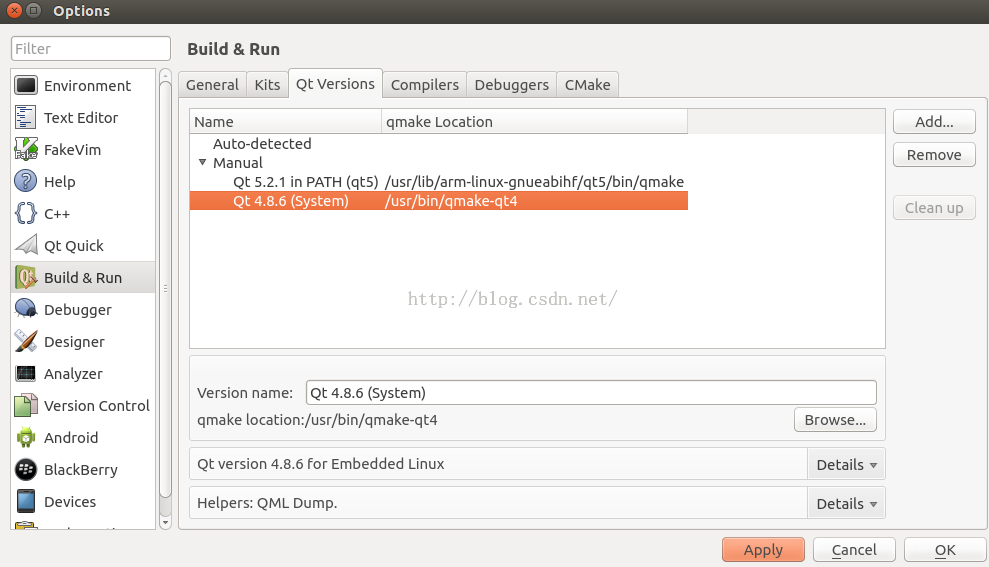
②.配置Qt Versions以及Compilers
在termial中输入which qmake以及which gcc把相应的地址添加进去

3.测试
在qt中opencv和测试cuda(如果有的话):
新建工程
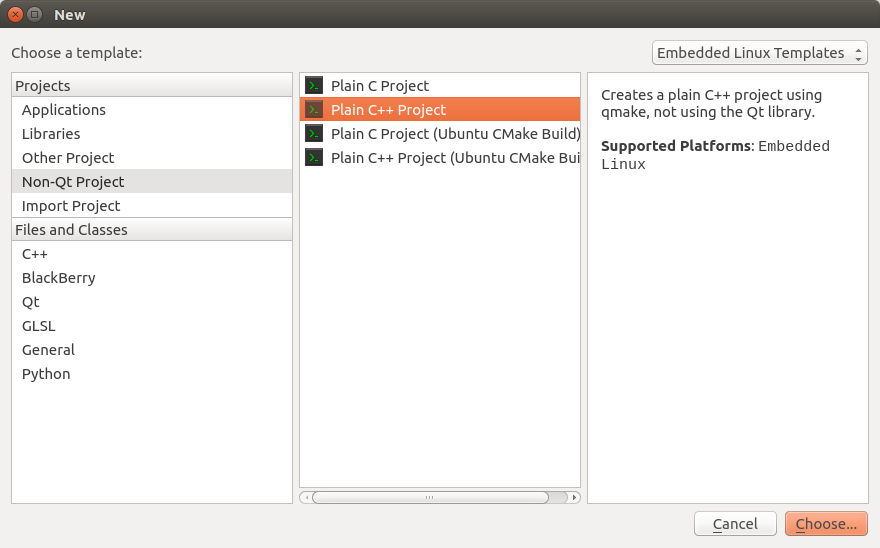
在.pro文件中添加include目录和链接库(”.”表示当前文件夹,这里是妙算通过deb软件包形式安装的opencv,通过源码编译的头文件在/usr/local/include中,库文件在/usr/local/lib中):
SOURCES += main.cpp
INCLUDEPATH += . \
/usr/include \
/usr/include/opencv \
/usr/include/opencv2 \
/usr/local/cuda-6.5/include
LIBS += /usr/lib/*.so在main.cpp中添加如下代码进行测试:
#include <cmath>
#include <iostream>
#include "opencv2/core.hpp"
#include <opencv2/core/utility.hpp>
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/cudaimgproc.hpp"
using namespace std;
using namespace cv;
using namespace cv::cuda;
static void help()
{
cout << "This program demonstrates line finding with the Hough transform." << endl;
}
int main(int argc, const char* argv[])
{
Mat src = imread("1.jpg");
if (src.empty())
{
help();
cout << "can not open " << endl;
return -1;
}
Mat mask;
cv::Canny(src, mask, 100, 200, 3);
Mat dst_cpu;
cv::cvtColor(mask, dst_cpu, COLOR_GRAY2BGR);
Mat dst_gpu = dst_cpu.clone();
vector<Vec4i> lines_cpu;
{
const int64 start = getTickCount();
cv::HoughLinesP(mask, lines_cpu, 1, CV_PI / 180, 50, 60, 5);
const double timeSec = (getTickCount() - start) / getTickFrequency();
cout << "CPU Time : " << timeSec * 1000 << " ms" << endl;
cout << "CPU Found : " << lines_cpu.size() << endl;
}
for (size_t i = 0; i < lines_cpu.size(); ++i)
{
Vec4i l = lines_cpu[i];
line(dst_cpu, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0, 0, 255), 3, LINE_AA);
}
GpuMat d_src(mask);
GpuMat d_lines;
{
const int64 start = getTickCount();
Ptr<cuda::HoughSegmentDetector> hough = cuda::createHoughSegmentDetector(1.0f, (float) (CV_PI / 180.0f), 50, 5);
hough->detect(d_src, d_lines);
const double timeSec = (getTickCount() - start) / getTickFrequency();
cout << "GPU Time : " << timeSec * 1000 << " ms" << endl;
cout << "GPU Found : " << d_lines.cols << endl;
}
vector<Vec4i> lines_gpu;
if (!d_lines.empty())
{
lines_gpu.resize(d_lines.cols);
Mat h_lines(1, d_lines.cols, CV_32SC4, &lines_gpu[0]);
d_lines.download(h_lines);
}
for (size_t i = 0; i < lines_gpu.size(); ++i)
{
Vec4i l = lines_gpu[i];
line(dst_gpu, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0, 0, 255), 3, LINE_AA);
}
imshow("source", src);
imshow("detected lines [CPU]", dst_cpu);
imshow("detected lines [GPU]", dst_gpu);
waitKey();
return 0;
}














 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









