







 超级会员免费看
超级会员免费看
一、Jetson Nano 安装
环境版本说明
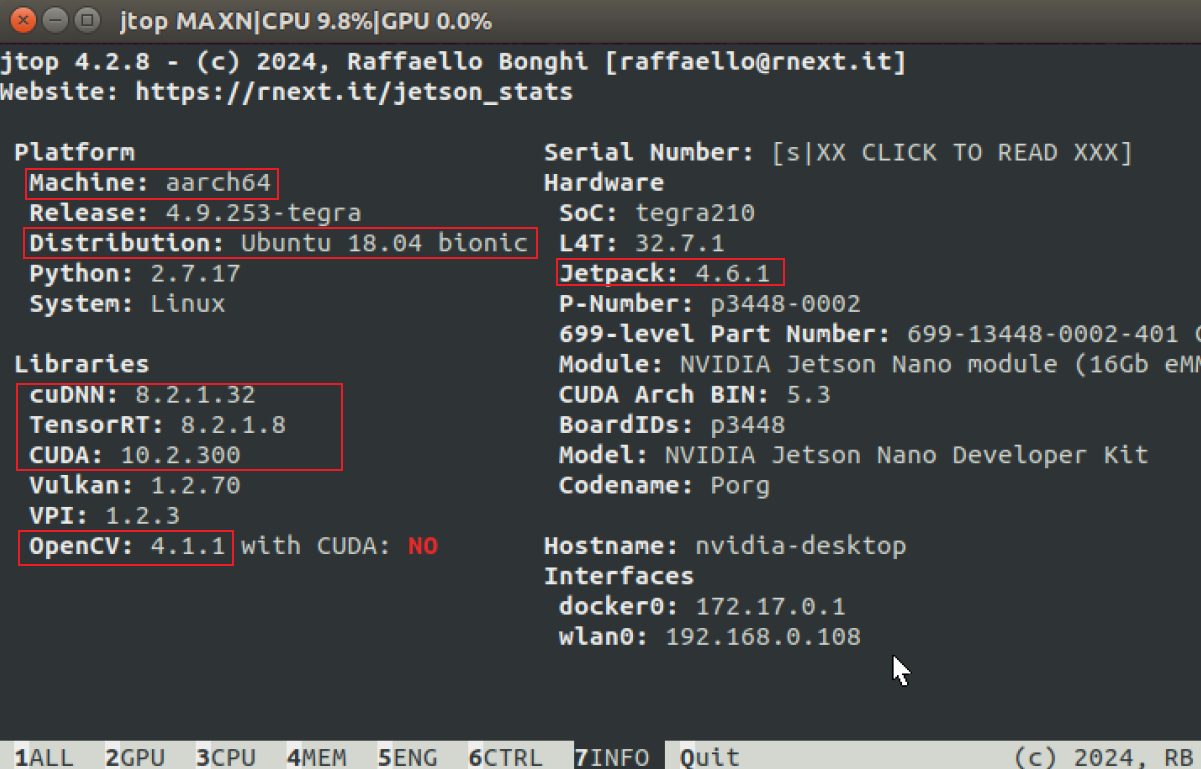
unbuntu:Ubuntu 18.04
ros:melodic
OpenCV:4.1.1
Jetpack:4.6.1
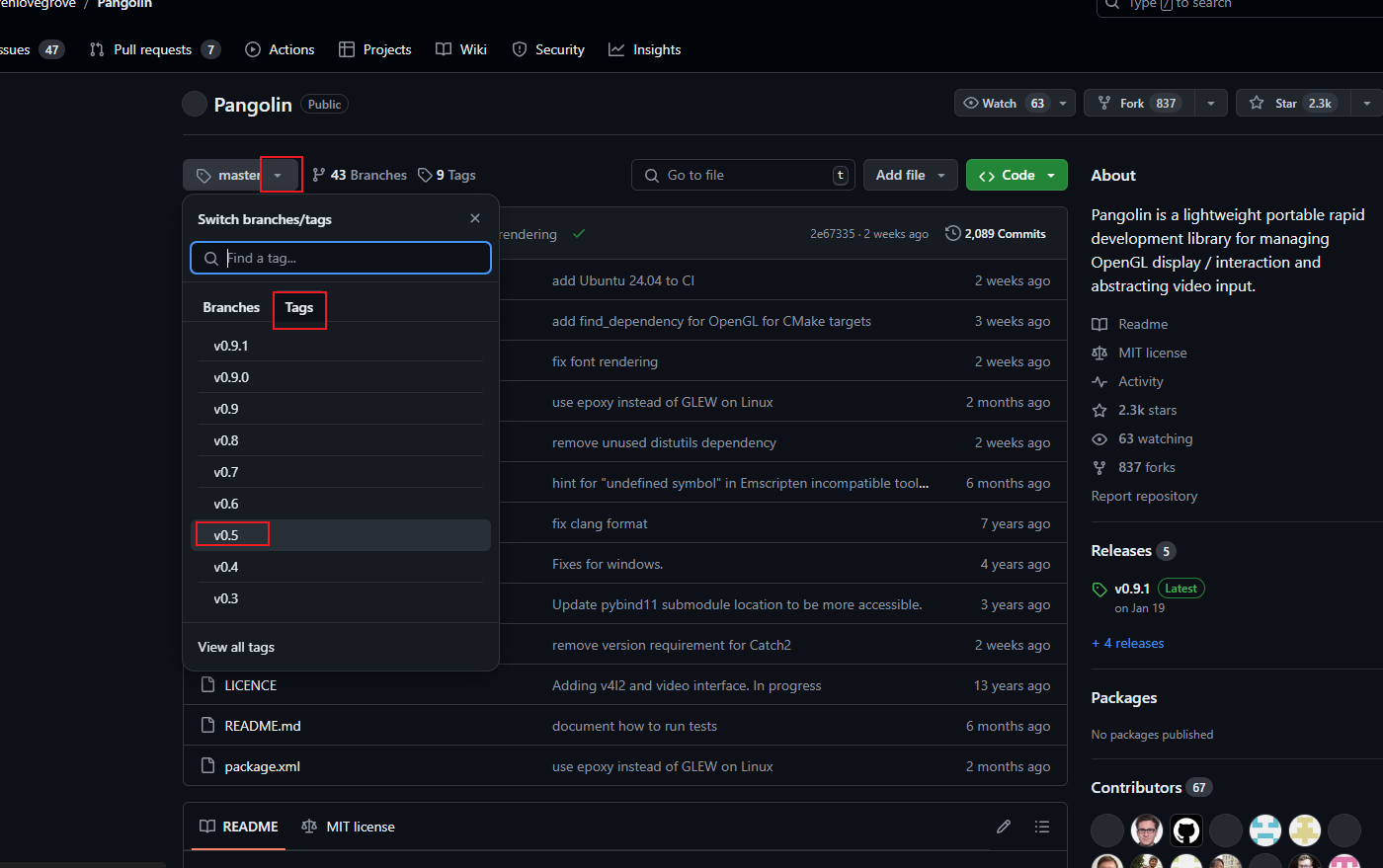
安装Pangolin0.5
Pangolin0.6用的是C++17标准编译。而ORB_SLAM2 和 slambook2 的代码用的还是C++11,因此报了一大堆不明错误。因此用了Pangolin0.5编译ORB-SLAM3时就不报错了。
下载Pangolin:https://github.com/stevenlovegrove/Pangolin
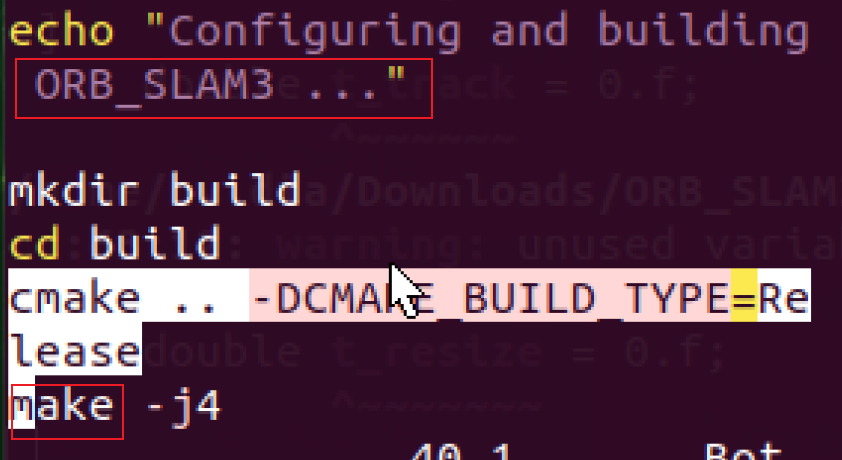
cd Pangolin
 订阅专栏 解锁全文
订阅专栏 解锁全文

















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











