







在之前一篇文章Linux ARM64 spin-table启动方式实现Hiberate功能_Dingjun798077632的博客-CSDN博客中尝试了使用spin-table启动方式实现Hiberate功能,原本应该采用PSIC启动方式,所以学习了一下PSIC启动方式,这里分析下PSIC启动
时涉及到的ATF Bl31固件代码。
关于PSIC启动的介绍可以参考linux cpu管理(三) psci启动 - 知乎
我们知道PSIC启动方式,主cpu启动secondary cpu时,最后是主CPU通过SMC陷入EL3的BL31固件中,调用bl31中电源管理相关服务的接口,完成secondary cpu的启动。psci接口规定了命令对应的function_id、接口的输入参数以及返回值。 其中输入参数可通过x0–x7寄存器传递,而返回值通过x0–x4寄存器传递。通过function_id,Linux内核指定调用BL31或者BL32(如果存在)的相关服务。
首先分析BL31的异常处理相关代码,这里用到ATF固件代码是从NXP官网下载的,对应NXP imx8系列。
一、BL31启动入口与异常向量入口配置
从BL31 中的bl31.ld.S 中SECTIONS定义可以知道,bl31的入口在文件bl31_entrypoint.s中,并且入口函数就是bl31_entrypoint。
bl31.ld.S代码如下:
OUTPUT_FORMAT(PLATFORM_LINKER_FORMAT)
OUTPUT_ARCH(PLATFORM_LINKER_ARCH)
//!指定了BL31入口函数
ENTRY(bl31_entrypoint)
......
MEMORY {
RAM (rwx): ORIGIN = BL31_BASE, LENGTH = BL31_LIMIT - BL31_BASE
#if SEPARATE_NOBITS_REGION
NOBITS (rw!a): ORIGIN = BL31_NOBITS_BASE, LENGTH = BL31_NOBITS_LIMIT - BL31_NOBITS_BASE
#else
#define NOBITS RAM
#endif
......
SECTIONS
{
. = BL31_BASE;
ASSERT(. == ALIGN(PAGE_SIZE),
"BL31_BASE address is not aligned on a page boundary.")
__BL31_START__ = .;
#if SEPARATE_CODE_AND_RODATA
.text . : {
__TEXT_START__ = .;
//指定了BL31入口文件
*bl31_entrypoint.o(.text*)
*(SORT_BY_ALIGNMENT(SORT(.text*)))
*(.vectors)
. = ALIGN(PAGE_SIZE);
__TEXT_END__ = .;
} >RAM
......
}在文件bl31\aarch64\bl31_entrypoint.S 中找到入口函数bl31_entrypoint代码如下:
func bl31_entrypoint
#if (defined COCKPIT_A53) || (defined COCKPIT_A72)
/*
* running on cluster Cortex-A53:
* => proceed to bl31 with errata
*/
mrs x20, mpidr_el1
ands x20, x20, #MPIDR_CLUSTER_MASK /* Test Affinity 1 */
beq bl31_entrypoint_proceed_errata
/*
* running on cluster Cortex-A72:
* => trampoline to 0xC00000xx
* where bl31 version for A72 stands
*/
mov x20, #0xC0000000
add x20, x20, #bl31_entrypoint_proceed - bl31_entrypoint
br x20
bl31_entrypoint_proceed_errata:
#endif
#if (defined COCKPIT_A53) || (defined COCKPIT_A72)
bl31_entrypoint_proceed:
#endif
/* ---------------------------------------------------------------
* Stash the previous bootloader arguments x0 - x3 for later use.
* ---------------------------------------------------------------
*/
mov x20, x0
mov x21, x1
mov x22, x2
mov x23, x3
#if !RESET_TO_BL31
... ...
#else
/* ---------------------------------------------------------------------
* For RESET_TO_BL31 systems which have a programmable reset address,
* bl31_entrypoint() is executed only on the cold boot path so we can
* skip the warm boot mailbox mechanism.
* ---------------------------------------------------------------------
*/
el3_entrypoint_common \
_init_sctlr=1 \
_warm_boot_mailbox=!PROGRAMMABLE_RESET_ADDRESS \
_secondary_cold_boot=!COLD_BOOT_SINGLE_CPU \
_init_memory=1 \
_init_c_runtime=1 \
_exception_vectors=runtime_exceptions \
_pie_fixup_size=BL31_LIMIT - BL31_BASE
/* ---------------------------------------------------------------------
* For RESET_TO_BL31 systems, BL31 is the first bootloader to run so
* there's no argument to relay from a previous bootloader. Zero the
* arguments passed to the platform layer to reflect that.
* ---------------------------------------------------------------------
*/
mov x20, 0
mov x21, 0
mov x22, 0
mov x23, 0
#endif /* RESET_TO_BL31 */
/* --------------------------------------------------------------------
* Perform BL31 setup
* --------------------------------------------------------------------
*/
mov x0, x20
mov x1, x21
mov x2, x22
mov x3, x23
bl bl31_setup
#if ENABLE_PAUTH
/* --------------------------------------------------------------------
* Program APIAKey_EL1 and enable pointer authentication
* --------------------------------------------------------------------
*/
bl pauth_init_enable_el3
#endif /* ENABLE_PAUTH */
/* --------------------------------------------------------------------
* Jump to main function
* --------------------------------------------------------------------
*/
bl bl31_main
/* --------------------------------------------------------------------
* Clean the .data & .bss sections to main memory. This ensures
* that any global data which was initialised by the primary CPU
* is visible to secondary CPUs before they enable their data
* caches and participate in coherency.
* --------------------------------------------------------------------
*/
adrp x0, __DATA_START__
add x0, x0, :lo12:__DATA_START__
adrp x1, __DATA_END__
add x1, x1, :lo12:__DATA_END__
sub x1, x1, x0
bl clean_dcache_range
adrp x0, __BSS_START__
add x0, x0, :lo12:__BSS_START__
adrp x1, __BSS_END__
add x1, x1, :lo12:__BSS_END__
sub x1, x1, x0
bl clean_dcache_range
b el3_exit
endfunc bl31_entrypoint代码用到了一个宏el3_entrypoint_common配置el3的异常向量及地址。在文件include\arch\aarch64\el3_common_macros.S中,可以看到宏el3_entrypoint_common的定义如下:
.macro el3_entrypoint_common \
_init_sctlr, _warm_boot_mailbox, _secondary_cold_boot, \
_init_memory, _init_c_runtime, _exception_vectors, \
_pie_fixup_size
.if \_init_sctlr
/* -------------------------------------------------------------
* This is the initialisation of SCTLR_EL3 and so must ensure
* that all fields are explicitly set rather than relying on hw.
* Some fields reset to an IMPLEMENTATION DEFINED value and
* others are architecturally UNKNOWN on reset.
*
* SCTLR.EE: Set the CPU endianness before doing anything that
* might involve memory reads or writes. Set to zero to select
* Little Endian.
*
* SCTLR_EL3.WXN: For the EL3 translation regime, this field can
* force all memory regions that are writeable to be treated as
* XN (Execute-never). Set to zero so that this control has no
* effect on memory access permissions.
*
* SCTLR_EL3.SA: Set to zero to disable Stack Alignment check.
*
* SCTLR_EL3.A: Set to zero to disable Alignment fault checking.
*
* SCTLR.DSSBS: Set to zero to disable speculation store bypass
* safe behaviour upon exception entry to EL3.
* -------------------------------------------------------------
*/
mov_imm x0, (SCTLR_RESET_VAL & ~(SCTLR_EE_BIT | SCTLR_WXN_BIT \
| SCTLR_SA_BIT | SCTLR_A_BIT | SCTLR_DSSBS_BIT))
msr sctlr_el3, x0
isb
.endif /* _init_sctlr */
#if DISABLE_MTPMU
bl mtpmu_disable
#endif
.if \_warm_boot_mailbox
/* -------------------------------------------------------------
* This code will be executed for both warm and cold resets.
* Now is the time to distinguish between the two.
* Query the platform entrypoint address and if it is not zero
* then it means it is a warm boot so jump to this address.
* -------------------------------------------------------------
*/
bl plat_get_my_entrypoint
cbz x0, do_cold_boot
br x0
do_cold_boot:
.endif /* _warm_boot_mailbox */
.if \_pie_fixup_size
#if ENABLE_PIE
/*
* ------------------------------------------------------------
* If PIE is enabled fixup the Global descriptor Table only
* once during primary core cold boot path.
*
* Compile time base address, required for fixup, is calculated
* using "pie_fixup" label present within first page.
* ------------------------------------------------------------
*/
pie_fixup:
ldr x0, =pie_fixup
and x0, x0, #~(PAGE_SIZE_MASK)
mov_imm x1, \_pie_fixup_size
add x1, x1, x0
bl fixup_gdt_reloc
#endif /* ENABLE_PIE */
.endif /* _pie_fixup_size */
/* ---------------------------------------------------------------------
* Set the exception vectors.
* ---------------------------------------------------------------------
*/
adr x0, \_exception_vectors
msr vbar_el3, x0
Isb
......二、BL31 ATF固件异常处理流程分析
接上文,在宏定义el3_entrypoint_common中,通过下面两行代码
adr x0, \_exception_vectors
msr vbar_el3, x0
配置了el3的异常向量及地址为runtime_exceptions。arm64位与32位架构不同,arm64的异常向量表地址不固定,在启动的时候由软件将异常向量表的地址设置到专用寄存器VBAR(Vector Base Address Register)中。
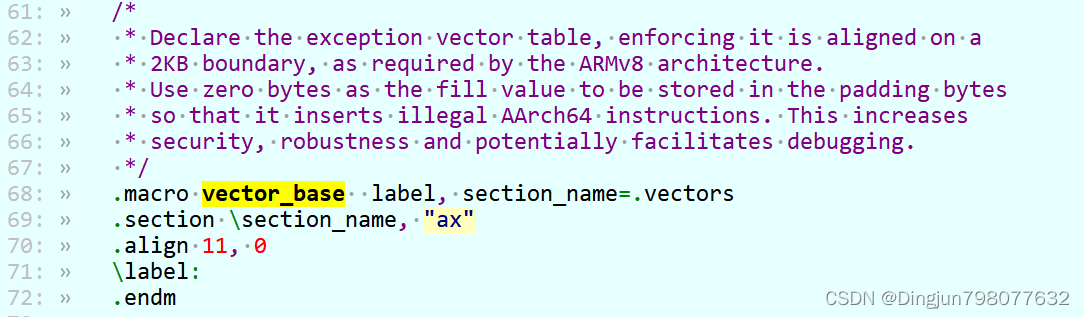
runtime_exceptions在文件bl31\aarch64\runtime_exceptions.S中,Linux内核通过SMC指令陷入到el3,对应的el异常处理入口就在该文件中。这里又涉及到另一个宏vector_base,在文件include/arch/aarch64/asm_macros.S。 宏 vector_base 将向量表放到了 .vectors 段中并且配置ax属性(可执行)等,至于.vectors 段,这里就不在分析了。
include/arch/aarch64/asm_macros.S代码,宏vector_base
bl31\aarch64\runtime_exceptions.S代码
vector_base runtime_exceptions
/* ---------------------------------------------------------------------
* Current EL with SP_EL0 : 0x0 - 0x200
* ---------------------------------------------------------------------
*/
vector_entry sync_exception_sp_el0
#ifdef MONITOR_TRAPS
stp x29, x30, [sp, #-16]!
mrs x30, esr_el3
ubfx x30, x30, #ESR_EC_SHIFT, #ESR_EC_LENGTH
/* Check for BRK */
cmp x30, #EC_BRK
b.eq brk_handler
ldp x29, x30, [sp], #16
#endif /* MONITOR_TRAPS */
/* We don't expect any synchronous exceptions from EL3 */
b report_unhandled_exception
end_vector_entry sync_exception_sp_el0
vector_entry irq_sp_el0
/*
* EL3 code is non-reentrant. Any asynchronous exception is a serious
* error. Loop infinitely.
*/
b report_unhandled_interrupt
end_vector_entry irq_sp_el0
vector_entry fiq_sp_el0
b report_unhandled_interrupt
end_vector_entry fiq_sp_el0
vector_entry serror_sp_el0
no_ret plat_handle_el3_ea
end_vector_entry serror_sp_el0
/* ---------------------------------------------------------------------
* Current EL with SP_ELx: 0x200 - 0x400
* ---------------------------------------------------------------------
*/
vector_entry sync_exception_sp_elx
/*
* This exception will trigger if anything went wrong during a previous
* exception entry or exit or while handling an earlier unexpected
* synchronous exception. There is a high probability that SP_EL3 is
* corrupted.
*/
b report_unhandled_exception
end_vector_entry sync_exception_sp_elx
vector_entry irq_sp_elx
b report_unhandled_interrupt
end_vector_entry irq_sp_elx
vector_entry fiq_sp_elx
b report_unhandled_interrupt
end_vector_entry fiq_sp_elx
vector_entry serror_sp_elx
#if !RAS_EXTENSION
check_if_serror_from_EL3
#endif
no_ret plat_handle_el3_ea
end_vector_entry serror_sp_elx
/* ---------------------------------------------------------------------
* Lower EL using AArch64 : 0x400 - 0x600
* ---------------------------------------------------------------------
*/
vector_entry sync_exception_aarch64
/*
* This exception vector will be the entry point for SMCs and traps
* that are unhandled at lower ELs most commonly. SP_EL3 should point
* to a valid cpu context where the general purpose and system register
* state can be saved.
*/
apply_at_speculative_wa
check_and_unmask_ea
handle_sync_exception
end_vector_entry sync_exception_aarch64
vector_entry irq_aarch64
apply_at_speculative_wa
check_and_unmask_ea
handle_interrupt_exception irq_aarch64
end_vector_entry irq_aarch64
vector_entry fiq_aarch64
apply_at_speculative_wa
check_and_unmask_ea
handle_interrupt_exception fiq_aarch64
end_vector_entry fiq_aarch64
vector_entry serror_aarch64
apply_at_speculative_wa
#if RAS_EXTENSION
msr daifclr, #DAIF_ABT_BIT
b enter_lower_el_async_ea
#else
handle_async_ea
#endif
end_vector_entry serror_aarch64
/* ---------------------------------------------------------------------
* Lower EL using AArch32 : 0x600 - 0x800
* ---------------------------------------------------------------------
*/
vector_entry sync_exception_aarch32
/*
* This exception vector will be the entry point for SMCs and traps
* that are unhandled at lower ELs most commonly. SP_EL3 should point
* to a valid cpu context where the general purpose and system register
* state can be saved.
*/
apply_at_speculative_wa
check_and_unmask_ea
handle_sync_exception
end_vector_entry sync_exception_aarch32
vector_entry irq_aarch32
apply_at_speculative_wa
check_and_unmask_ea
handle_interrupt_exception irq_aarch32
end_vector_entry irq_aarch32
vector_entry fiq_aarch32
apply_at_speculative_wa
check_and_unmask_ea
handle_interrupt_exception fiq_aarch32
end_vector_entry fiq_aarch32
vector_entry serror_aarch32
apply_at_speculative_wa
#if RAS_EXTENSION
msr daifclr, #DAIF_ABT_BIT
b enter_lower_el_async_ea
#else
handle_async_ea
#endif
end_vector_entry serror_aarch32在handle_sync_exception中,

mrs x30, esr_el3
ubfx x30, x30, #ESR_EC_SHIFT, #ESR_EC_LENGTH
将esr_el3读取到x30寄存器,ubfx x30, x30, #ESR_EC_SHIFT, #ESR_EC_LENGTH 相当于x30=(x30 >> ESR_EC_SHIFT) & (1 << ESR_EC_LENGTH -1),
实际就是取出esr_el3的26-31位,即获取异常原因。esr_el3寄存器是异常综合寄存器,当smc陷入el3时,该寄存器ec域(esr_el3[31:26])保存触发异常的原因,esr_el3具体定义如下:
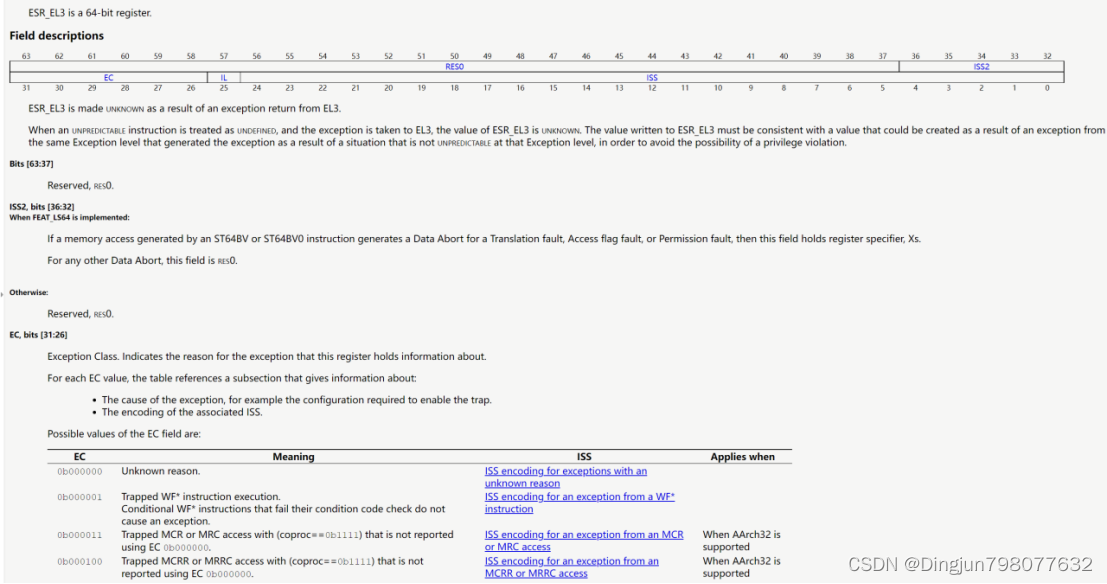

上面获取异常原因,接下来做相应的处理,对应的代码
cmp x30, #EC_AARCH32_SMC
b.eq smc_handler32
cmp x30, #EC_AARCH64_SMC
b.eq smc_handler64
/* Synchronous exceptions other than the above are assumed to be EA */
ldr x30, [sp, #CTX_GPREGS_OFFSET + CTX_GPREG_LR]
b enter_lower_el_sync_ea
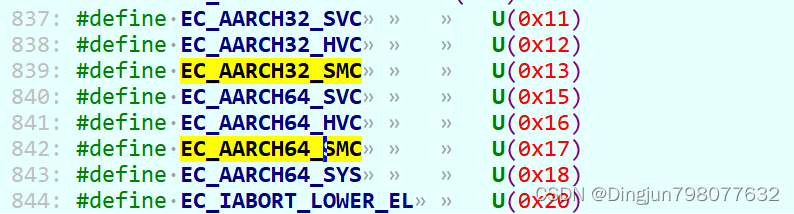
EC_AARCH64_SMC的值位0x17,就是对应的上面esr_el3的ec域SMC instruction execution in AArch64 state。上面的代码就很好理解了,AARCH64状态下触发异常smc异常,调用smc_handler64。AARCH32状态下触发异常smc异常,调用smc_handler32(AARCH64和AARCH32状态下smc的异常入口是不一样的,上面有说明,但是sync_exception_aarch64和sync_exception_aarch32都使用了handle_sync_exception,所以这需要区分EC_AARCH32_SMC和EC_AARCH64_SMC)。
smc_handler64代码如下:
smc_handler64:
/* NOTE: The code below must preserve x0-x4 */
/*
* Save general purpose and ARMv8.3-PAuth registers (if enabled).
* If Secure Cycle Counter is not disabled in MDCR_EL3 when
* ARMv8.5-PMU is implemented, save PMCR_EL0 and disable Cycle Counter.
*/
bl save_gp_pmcr_pauth_regs
#if ENABLE_PAUTH
/* Load and program APIAKey firmware key */
bl pauth_load_bl31_apiakey
#endif
/*
* Populate the parameters for the SMC handler.
* We already have x0-x4 in place. x5 will point to a cookie (not used
* now). x6 will point to the context structure (SP_EL3) and x7 will
* contain flags we need to pass to the handler.
*/
mov x5, xzr
mov x6, sp
/*
* Restore the saved C runtime stack value which will become the new
* SP_EL0 i.e. EL3 runtime stack. It was saved in the 'cpu_context'
* structure prior to the last ERET from EL3.
*/
ldr x12, [x6, #CTX_EL3STATE_OFFSET + CTX_RUNTIME_SP]
/* Switch to SP_EL0 */
msr spsel, #MODE_SP_EL0
/*
* Save the SPSR_EL3, ELR_EL3, & SCR_EL3 in case there is a world
* switch during SMC handling.
* TODO: Revisit if all system registers can be saved later.
*/
mrs x16, spsr_el3
mrs x17, elr_el3
mrs x18, scr_el3
stp x16, x17, [x6, #CTX_EL3STATE_OFFSET + CTX_SPSR_EL3]
str x18, [x6, #CTX_EL3STATE_OFFSET + CTX_SCR_EL3]
/* Clear flag register */
mov x7, xzr
#if ENABLE_RME
/* Copy SCR_EL3.NSE bit to the flag to indicate caller's security */
ubfx x7, x18, #SCR_NSE_SHIFT, 1
/*
* Shift copied SCR_EL3.NSE bit by 5 to create space for
* SCR_EL3.NS bit. Bit 5 of the flag correspondes to
* the SCR_EL3.NSE bit.
*/
lsl x7, x7, #5
#endif /* ENABLE_RME */
/* Copy SCR_EL3.NS bit to the flag to indicate caller's security */
bfi x7, x18, #0, #1
mov sp, x12
/* Get the unique owning entity number */
ubfx x16, x0, #FUNCID_OEN_SHIFT, #FUNCID_OEN_WIDTH
ubfx x15, x0, #FUNCID_TYPE_SHIFT, #FUNCID_TYPE_WIDTH
orr x16, x16, x15, lsl #FUNCID_OEN_WIDTH
/* Load descriptor index from array of indices */
adrp x14, rt_svc_descs_indices
add x14, x14, :lo12:rt_svc_descs_indices
ldrb w15, [x14, x16]
/* Any index greater than 127 is invalid. Check bit 7. */
tbnz w15, 7, smc_unknown
/*
* Get the descriptor using the index
* x11 = (base + off), w15 = index
*
* handler = (base + off) + (index << log2(size))
*/
adr x11, (__RT_SVC_DESCS_START__ + RT_SVC_DESC_HANDLE)
lsl w10, w15, #RT_SVC_SIZE_LOG2
ldr x15, [x11, w10, uxtw]
/*
* Call the Secure Monitor Call handler and then drop directly into
* el3_exit() which will program any remaining architectural state
* prior to issuing the ERET to the desired lower EL.
*/
#if DEBUG
cbz x15, rt_svc_fw_critical_error
#endif
blr x15
b el3_exit
smc_unknown:
/*
* Unknown SMC call. Populate return value with SMC_UNK and call
* el3_exit() which will restore the remaining architectural state
* i.e., SYS, GP and PAuth registers(if any) prior to issuing the ERET
* to the desired lower EL.
*/
mov x0, #SMC_UNK
str x0, [x6, #CTX_GPREGS_OFFSET + CTX_GPREG_X0]
b el3_exit
函数 smc_handler64主要做了下面事情:
1. 保存Non-Secure world中的 spsr_el3 、elr_el3、scr_el3到栈中;
2. 切换sp到SP_EL0;
3. 根据 function_id 找到对应的 runtime service, 查找方法:
Index = (function_id >> 24 & 0x3f) | ((function_id >> 31) << 6);
Handler=__RT_SVC_DESCS_START__+RT_SVC_DESC_HANDLE+ rt_svc_descs_indices[Index] << 5
__RT_SVC_DESCS_START__ 为 rt_svc_descs 的起始地址,RT_SVC_DESC_HANDLE 为服务处理函数 handle 在结构体rt_svc_desc 中的偏移,左移5,是因为结构体 rt_svc_desc 大小为 32字节。
4. 跳转到 runtime service 的处理函数 handle 中执行。
5. 最后退出el3
接下来需要结合Linux PSCI相关代码分析,先简单分析Linux PSCI SMC调用处理。
三、Linux PSCI启动方式SMC调用分析
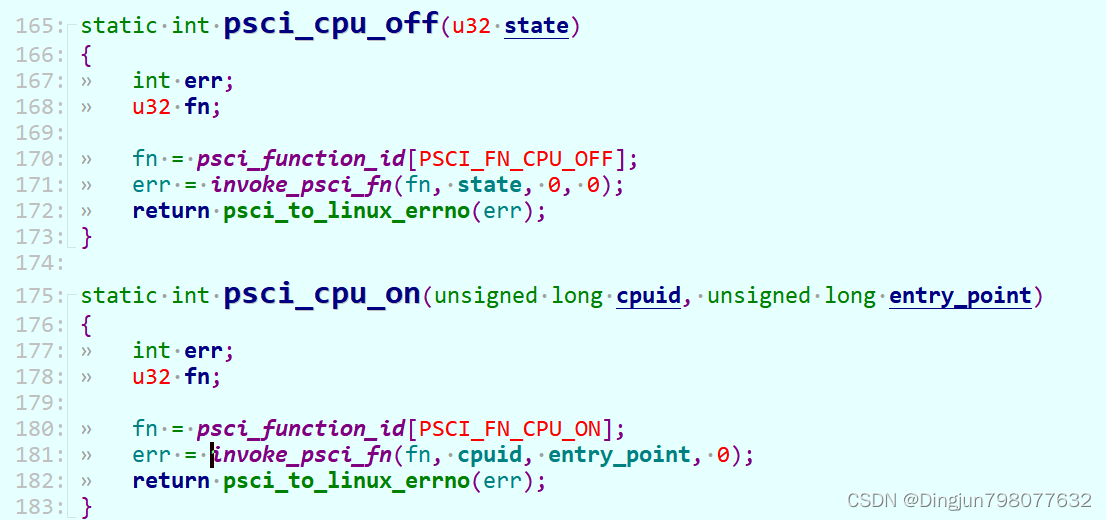
PSIC启动方式,主cpu启动secondary cpu时,最后是主cpu调用到下面的psci_cpu_on接口(至于为什么调用到psci_cpu_on接口,相关文章很多,篇幅有限,这里略过)。
Linux代码drivers\firmware\psci.c
设置invoke_psci_fn的代码如下:
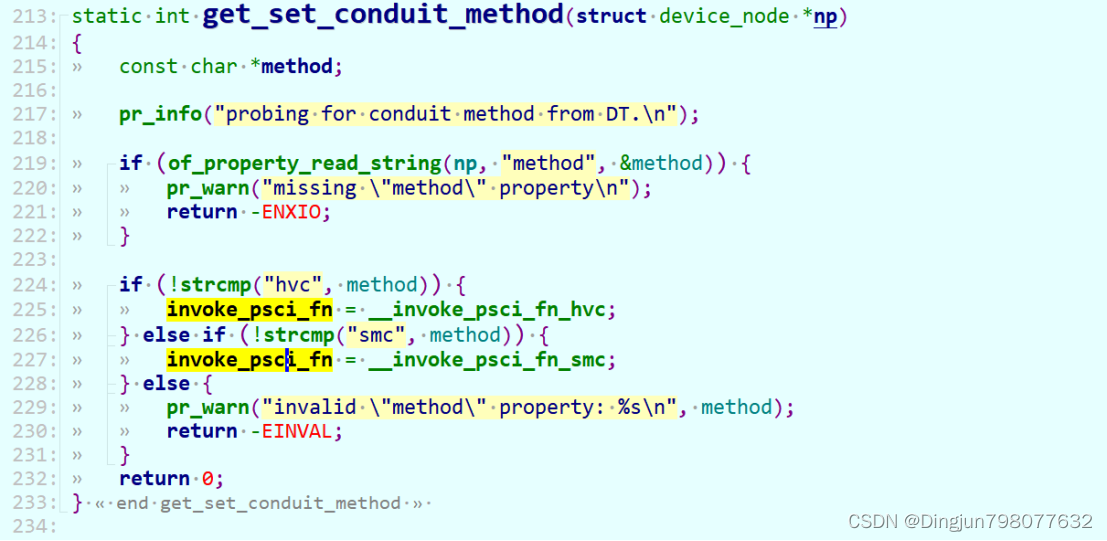 该接口中invoke_psci_fn指向__invoke_psci_fn_smc也就是smc调用(部分soc可能没有实现el3,采用hvc切换到el2,不在本文讨论范围),fn是本地调用的function_id,参数cpuid是需要启动的cpu(一般主cpuid为0,secondary cpu为1、2、3...),entry_point则指向secondary cpu在linux内核的入口地址。
该接口中invoke_psci_fn指向__invoke_psci_fn_smc也就是smc调用(部分soc可能没有实现el3,采用hvc切换到el2,不在本文讨论范围),fn是本地调用的function_id,参数cpuid是需要启动的cpu(一般主cpuid为0,secondary cpu为1、2、3...),entry_point则指向secondary cpu在linux内核的入口地址。
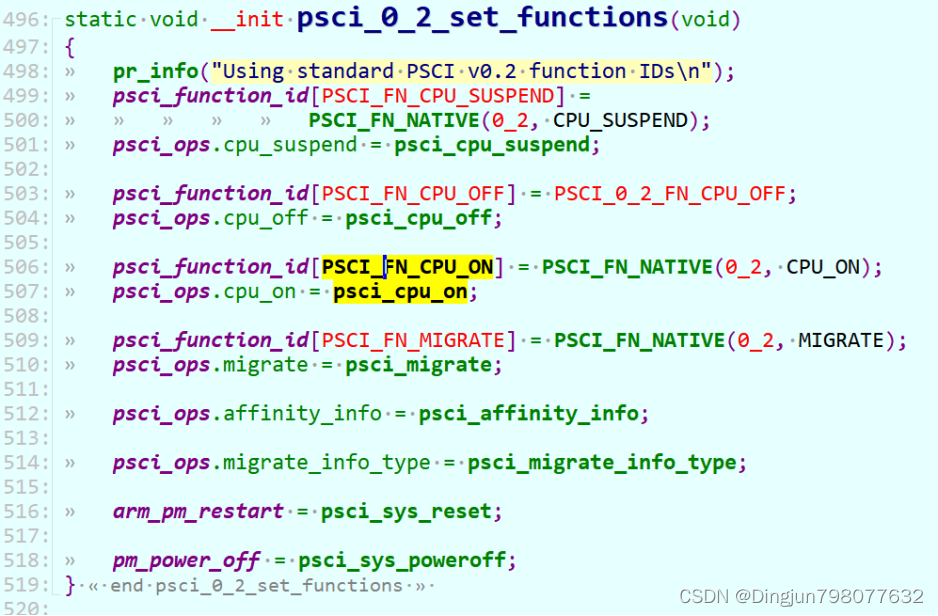

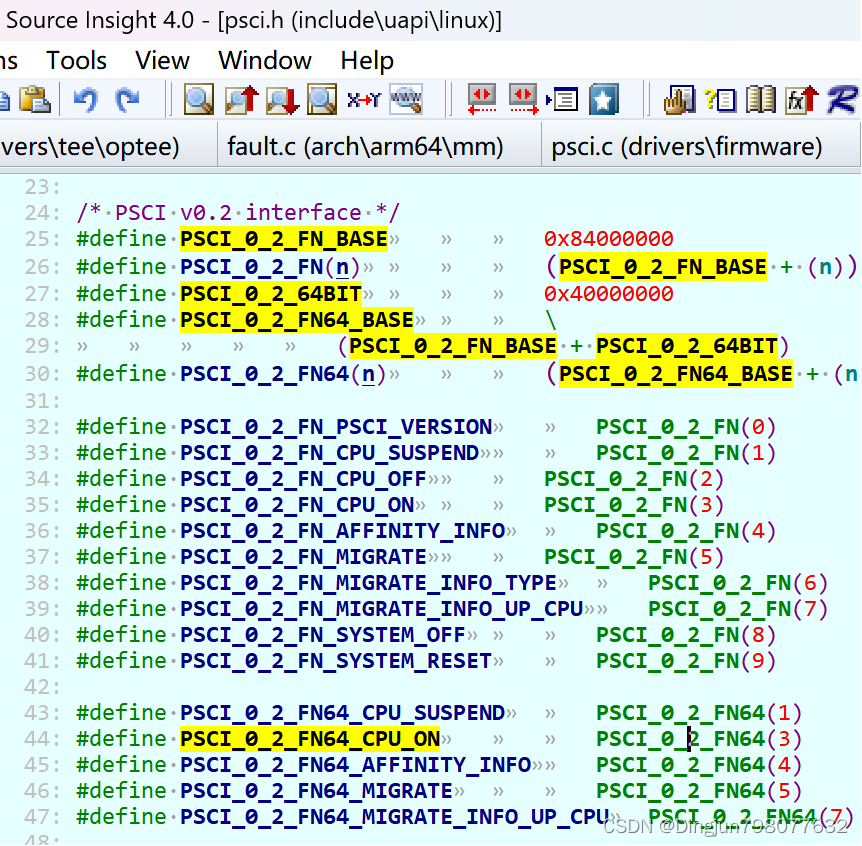
以PSCI0.2为例,PSCI_FN_CPU_ON对应的function_id为PSCI_0_2_FN64_CPU_ON,也就是0x84000000 + 0x40000000 + 0x03 = 0xC4000003,也就是psci_cpu_on中smc调用的第一个参数fn为0xC4000003。
__invoke_psci_fn_smc的具体实现如下:


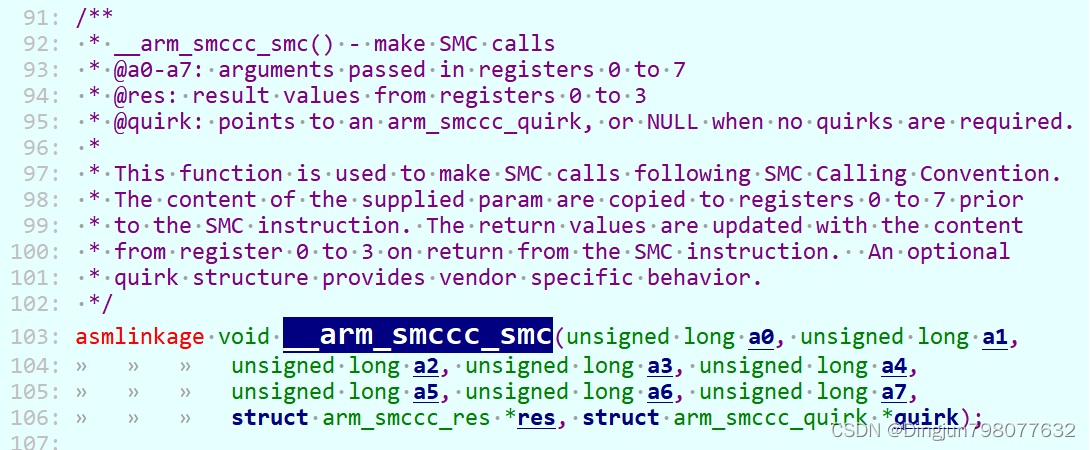
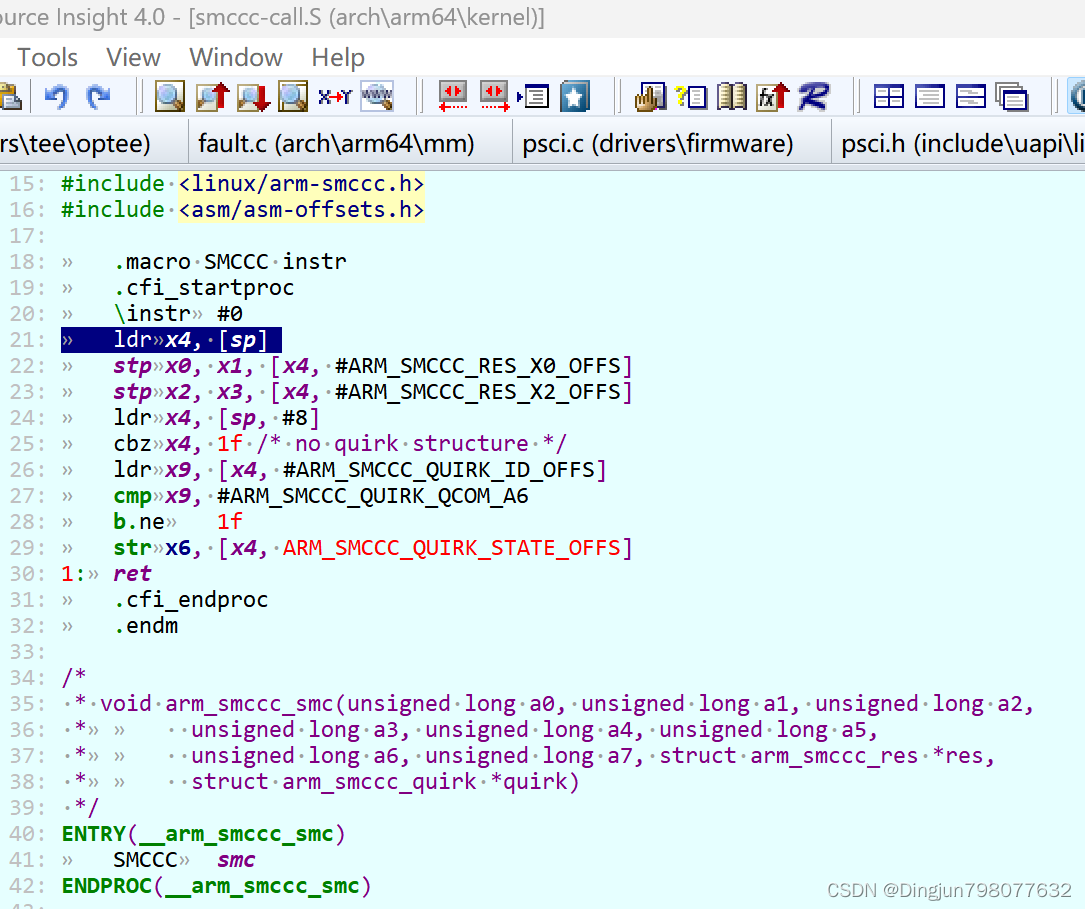 __invoke_psci_fn_smc最终通过汇编代码smc #0陷入到BL31(el3),也就是上文的vector_entry sync_exception_aarch64,这里fn(function_id)、cpuid、entry_point放入通用寄存器x0、x1、x2中,作为参数传递到了BL31。
__invoke_psci_fn_smc最终通过汇编代码smc #0陷入到BL31(el3),也就是上文的vector_entry sync_exception_aarch64,这里fn(function_id)、cpuid、entry_point放入通用寄存器x0、x1、x2中,作为参数传递到了BL31。
四、BL31 SMC服务分析
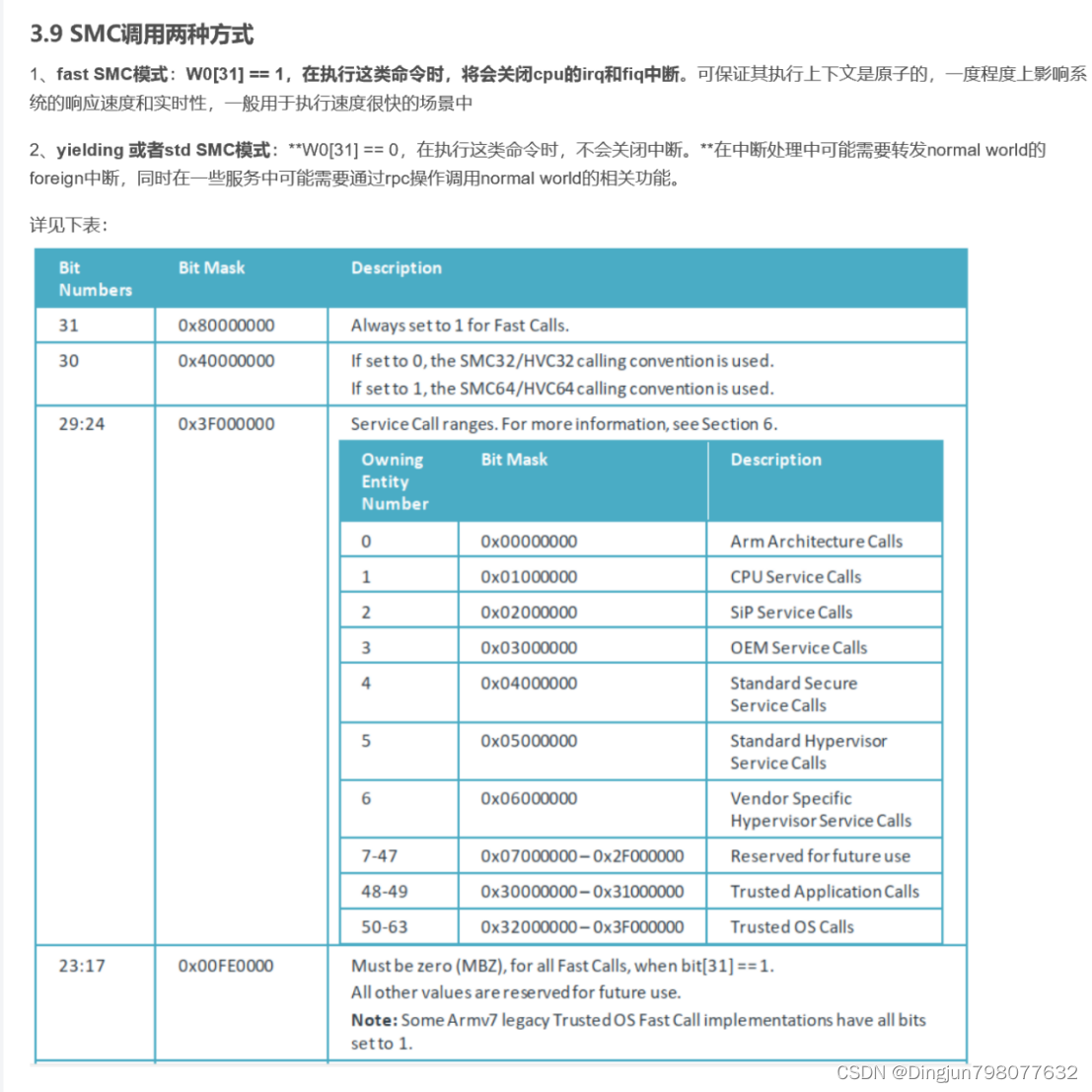
SMC调用的function_id有相应的规范,相关定义如下图,也可以参考文章
【转】ATF中SMC深入理解_arm smc_Hkcoco的博客-CSDN博客
上面的代码中smc_handler64中,把相关宏定义也列出来,加上注释分析这段代码
#define FUNCID_TYPE_SHIFT U(31)
#define FUNCID_TYPE_MASK U(0x1)
#define FUNCID_TYPE_WIDTH U(1)
#define FUNCID_CC_SHIFT U(30)
#define FUNCID_CC_MASK U(0x1)
#define FUNCID_CC_WIDTH U(1)
#define FUNCID_OEN_SHIFT U(24)
#define FUNCID_OEN_MASK U(0x3f)
#define FUNCID_OEN_WIDTH U(6)
#define FUNCID_NUM_SHIFT U(0)
#define FUNCID_NUM_MASK U(0xffff)
#define FUNCID_NUM_WIDTH U(16)
......
/* Get the unique owning entity number */
//上文已分析,x0保存的是function_id,具体值0xC4000003,这里取出了function_id的OEN保存到x16,OEN值为4
ubfx x16, x0, #FUNCID_OEN_SHIFT, #FUNCID_OEN_WIDTH
//取出smc调用类型, x15为1
ubfx x15, x0, #FUNCID_TYPE_SHIFT, #FUNCID_TYPE_WIDTH
//x16 = (x15 << 6) | x16,将OEN作为低6位,type作为第7位组合成已数字index
orr x16, x16, x15, lsl #FUNCID_OEN_WIDTH
/*上面的代码相当于Index = (function_id >> 24 & 0x3f) | ((function_id >> 31) << 6),
接下来的代码查找function_id对应的Handler ,
Handler = __RT_SVC_DESCS_START__ + RT_SVC_DESC_HANDLE + rt_svc_descs_indices[Index] << 5
这里__RT_SVC_DESCS_START__中 */
/* Load descriptor index from array of indices */
adrp x14, rt_svc_descs_indices
add x14, x14, :lo12:rt_svc_descs_indices
ldrb w15, [x14, x16]
/* Any index greater than 127 is invalid. Check bit 7. */
tbnz w15, 7, smc_unknown
/*
* Get the descriptor using the index
* x11 = (base + off), w15 = index
*
* handler = (base + off) + (index << log2(size))
*/
adr x11, (__RT_SVC_DESCS_START__ + RT_SVC_DESC_HANDLE)
lsl w10, w15, #RT_SVC_SIZE_LOG2
ldr x15, [x11, w10, uxtw]
/*
* Call the Secure Monitor Call handler and then drop directly into
* el3_exit() which will program any remaining architectural state
* prior to issuing the ERET to the desired lower EL.
*/
#if DEBUG
cbz x15, rt_svc_fw_critical_error
#endif
blr x15
b el3_exit
根据 x0中保存的function_id ,找到对应的 runtime service, 查找方法:
Index = (function_id >> 24 & 0x3f) | ((function_id >> 31) << 6);
Handler=__RT_SVC_DESCS_START__+RT_SVC_DESC_HANDLE+ rt_svc_descs_indices[Index] << 5
__RT_SVC_DESCS_START__ 为 rt_svc_descs 的起始地址,RT_SVC_DESC_HANDLE 为服务处理函数 handle 在结构体rt_svc_desc 中的偏移,左移5,是因为结构体 rt_svc_desc 大小为 32字节。查找handle 的方法需要结合rt_svc_descs_indices初始化代码分析。
rt_svc_descs_indices初始化在文件common/runtime_svc.c中,代码如下:
void __init runtime_svc_init(void)
{
int rc = 0;
uint8_t index, start_idx, end_idx;
rt_svc_desc_t *rt_svc_descs;
... ...
/* Initialise internal variables to invalid state */
(void)memset(rt_svc_descs_indices, -1, sizeof(rt_svc_descs_indices));
rt_svc_descs = (rt_svc_desc_t *) RT_SVC_DESCS_START;
for (index = 0U; index < RT_SVC_DECS_NUM; index++) {
rt_svc_desc_t *service = &rt_svc_descs[index];
... ...
if (service->init != NULL) {
rc = service->init();
if (rc != 0) {
ERROR("Error initializing runtime service %s\n",
service->name);
continue;
}
}
/*
* Fill the indices corresponding to the start and end
* owning entity numbers with the index of the
* descriptor which will handle the SMCs for this owning
* entity range.
*/
start_idx = (uint8_t)get_unique_oen(service->start_oen,
service->call_type);
end_idx = (uint8_t)get_unique_oen(service->end_oen,
service->call_type);
assert(start_idx <= end_idx);
assert(end_idx < MAX_RT_SVCS);
for (; start_idx <= end_idx; start_idx++)
rt_svc_descs_indices[start_idx] = index;
}
}上面RT_SVC_DESCS_START就是__section("rt_svc_descs")的首地址,__section("rt_svc_descs")保存这个各rt_svc_desc_t结构体。
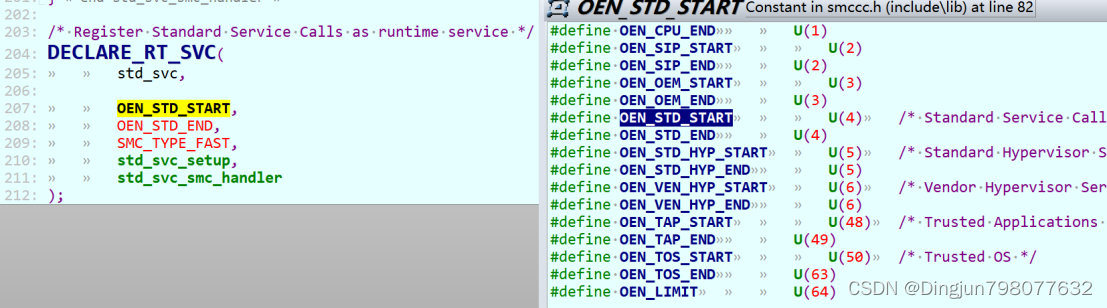

 可以看到,所有OEN为4的fast SMC都由std_svc_smc_handler处理。
可以看到,所有OEN为4的fast SMC都由std_svc_smc_handler处理。
static uintptr_t std_svc_smc_handler(uint32_t smc_fid,
u_register_t x1,
u_register_t x2,
u_register_t x3,
u_register_t x4,
void *cookie,
void *handle,
u_register_t flags)
{
if (((smc_fid >> FUNCID_CC_SHIFT) & FUNCID_CC_MASK) == SMC_32) {
/* 32-bit SMC function, clear top parameter bits */
x1 &= UINT32_MAX;
x2 &= UINT32_MAX;
x3 &= UINT32_MAX;
x4 &= UINT32_MAX;
}
/*
* Dispatch PSCI calls to PSCI SMC handler and return its return
* value
*/
if (is_psci_fid(smc_fid)) {
uint64_t ret;
#if ENABLE_RUNTIME_INSTRUMENTATION
/*
* Flush cache line so that even if CPU power down happens
* the timestamp update is reflected in memory.
*/
PMF_WRITE_TIMESTAMP(rt_instr_svc,
RT_INSTR_ENTER_PSCI,
PMF_CACHE_MAINT,
get_cpu_data(cpu_data_pmf_ts[CPU_DATA_PMF_TS0_IDX]));
#endif
ret = psci_smc_handler(smc_fid, x1, x2, x3, x4,
cookie, handle, flags);
#if ENABLE_RUNTIME_INSTRUMENTATION
PMF_CAPTURE_TIMESTAMP(rt_instr_svc,
RT_INSTR_EXIT_PSCI,
PMF_NO_CACHE_MAINT);
#endif
SMC_RET1(handle, ret);
}
... ...
}u_register_t psci_smc_handler(uint32_t smc_fid,
u_register_t x1,
u_register_t x2,
u_register_t x3,
u_register_t x4,
void *cookie,
void *handle,
u_register_t flags)
{
u_register_t ret;
if (is_caller_secure(flags))
return (u_register_t)SMC_UNK;
/* Check the fid against the capabilities */
if ((psci_caps & define_psci_cap(smc_fid)) == 0U)
return (u_register_t)SMC_UNK;
if (((smc_fid >> FUNCID_CC_SHIFT) & FUNCID_CC_MASK) == SMC_32) {
/* 32-bit PSCI function, clear top parameter bits */
... ...
} else {
/* 64-bit PSCI function */
switch (smc_fid) {
case PSCI_CPU_SUSPEND_AARCH64:
ret = (u_register_t)
psci_cpu_suspend((unsigned int)x1, x2, x3);
break;
case PSCI_CPU_ON_AARCH64:
ret = (u_register_t)psci_cpu_on(x1, x2, x3);
break;
case PSCI_AFFINITY_INFO_AARCH64:
ret = (u_register_t)
psci_affinity_info(x1, (unsigned int)x2);
break;
case PSCI_MIG_AARCH64:
ret = (u_register_t)psci_migrate(x1);
break;
case PSCI_MIG_INFO_UP_CPU_AARCH64:
ret = psci_migrate_info_up_cpu();
break;
case PSCI_NODE_HW_STATE_AARCH64:
ret = (u_register_t)psci_node_hw_state(
x1, (unsigned int) x2);
break;
case PSCI_SYSTEM_SUSPEND_AARCH64:
ret = (u_register_t)psci_system_suspend(x1, x2);
break;
#if ENABLE_PSCI_STAT
case PSCI_STAT_RESIDENCY_AARCH64:
ret = psci_stat_residency(x1, (unsigned int) x2);
break;
case PSCI_STAT_COUNT_AARCH64:
ret = psci_stat_count(x1, (unsigned int) x2);
break;
#endif
case PSCI_MEM_CHK_RANGE_AARCH64:
ret = psci_mem_chk_range(x1, x2);
break;
case PSCI_SYSTEM_RESET2_AARCH64:
/* We should never return from psci_system_reset2() */
ret = psci_system_reset2((uint32_t) x1, x2);
break;
default:
WARN("Unimplemented PSCI Call: 0x%x\n", smc_fid);
ret = (u_register_t)SMC_UNK;
break;
}
}
return ret;
}对于PSCI启动方式CPU_ON,显然会走
case PSCI_CPU_ON_AARCH64:
ret = (u_register_t)psci_cpu_on(x1, x2, x3);
int psci_cpu_on(u_register_t target_cpu,
uintptr_t entrypoint,
u_register_t context_id)
{
int rc;
entry_point_info_t ep;
/* Determine if the cpu exists of not */
rc = psci_validate_mpidr(target_cpu);
if (rc != PSCI_E_SUCCESS)
return PSCI_E_INVALID_PARAMS;
/* Validate the entry point and get the entry_point_info */
rc = psci_validate_entry_point(&ep, entrypoint, context_id);
if (rc != PSCI_E_SUCCESS)
return rc;
/*
* To turn this cpu on, specify which power
* levels need to be turned on
*/
return psci_cpu_on_start(target_cpu, &ep);
}接下来的流程大致如下
->psci_cpu_on() //lib/psci/psci_main.c
->psci_validate_entry_point() //验证入口地址有效性并 保存入口点到一个结构ep中
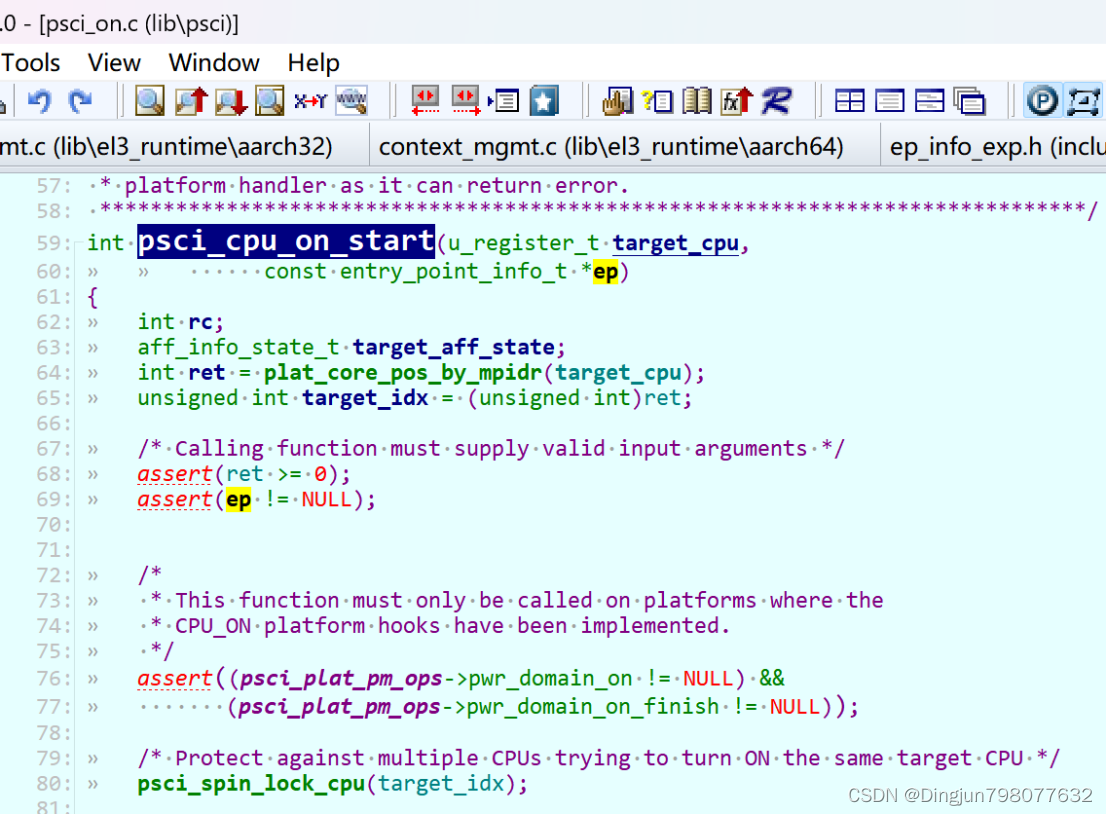
->psci_cpu_on_start(target_cpu, &ep) //ep入口地址
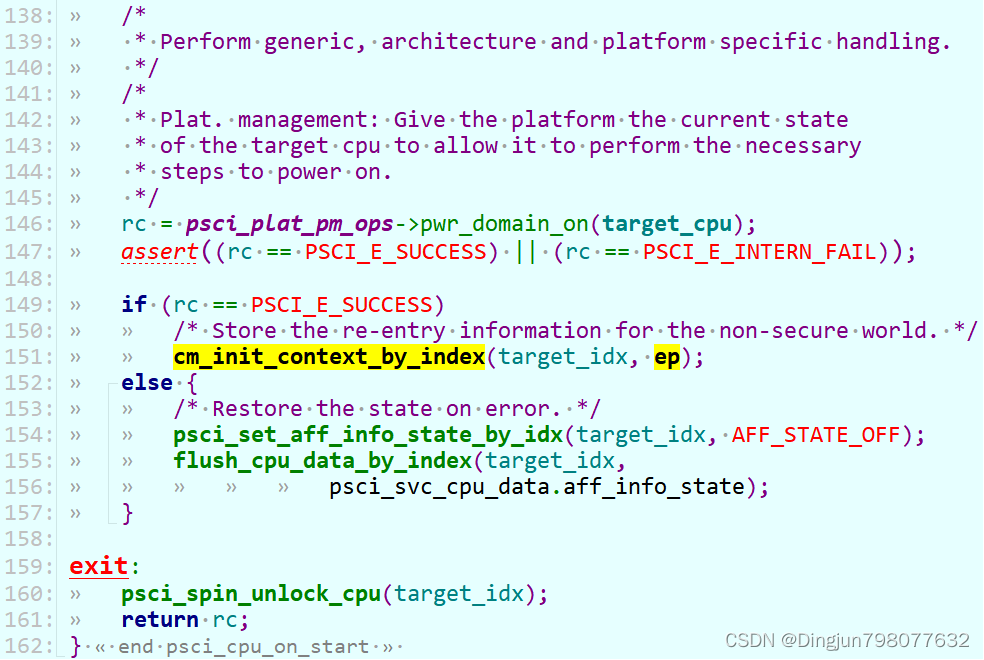
->psci_plat_pm_ops->pwr_domain_on(target_cpu)
->qemu_pwr_domain_on //实现核上电(平台实现)
/* Store the re-entry information for the non-secure world. */
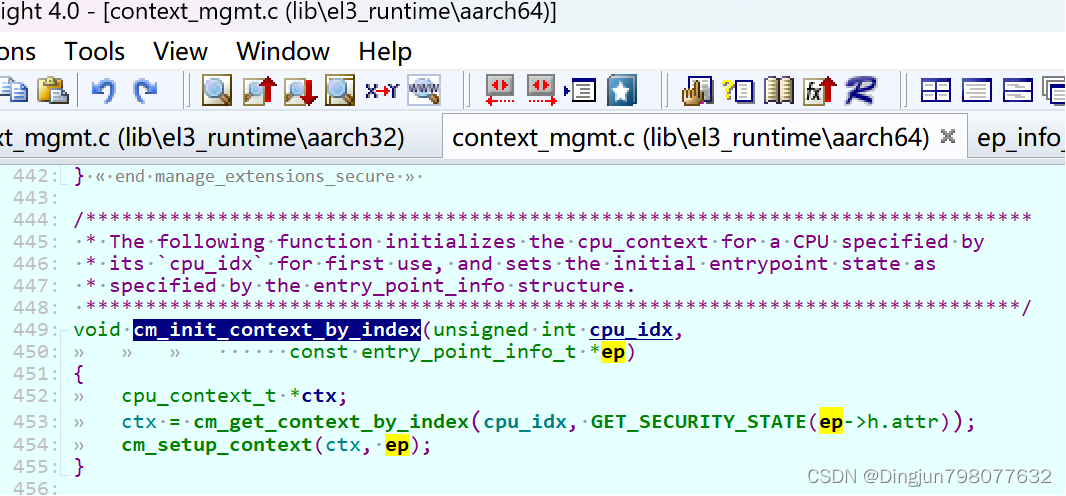
->cm_init_context_by_index() //重点: 会通过cpu的编号找到 cpu上下文(cpu_context_t),存在cpu寄存器的值,异常返回的时候写写到对应的寄存器中,然后eret,旧返回到了el1!!!
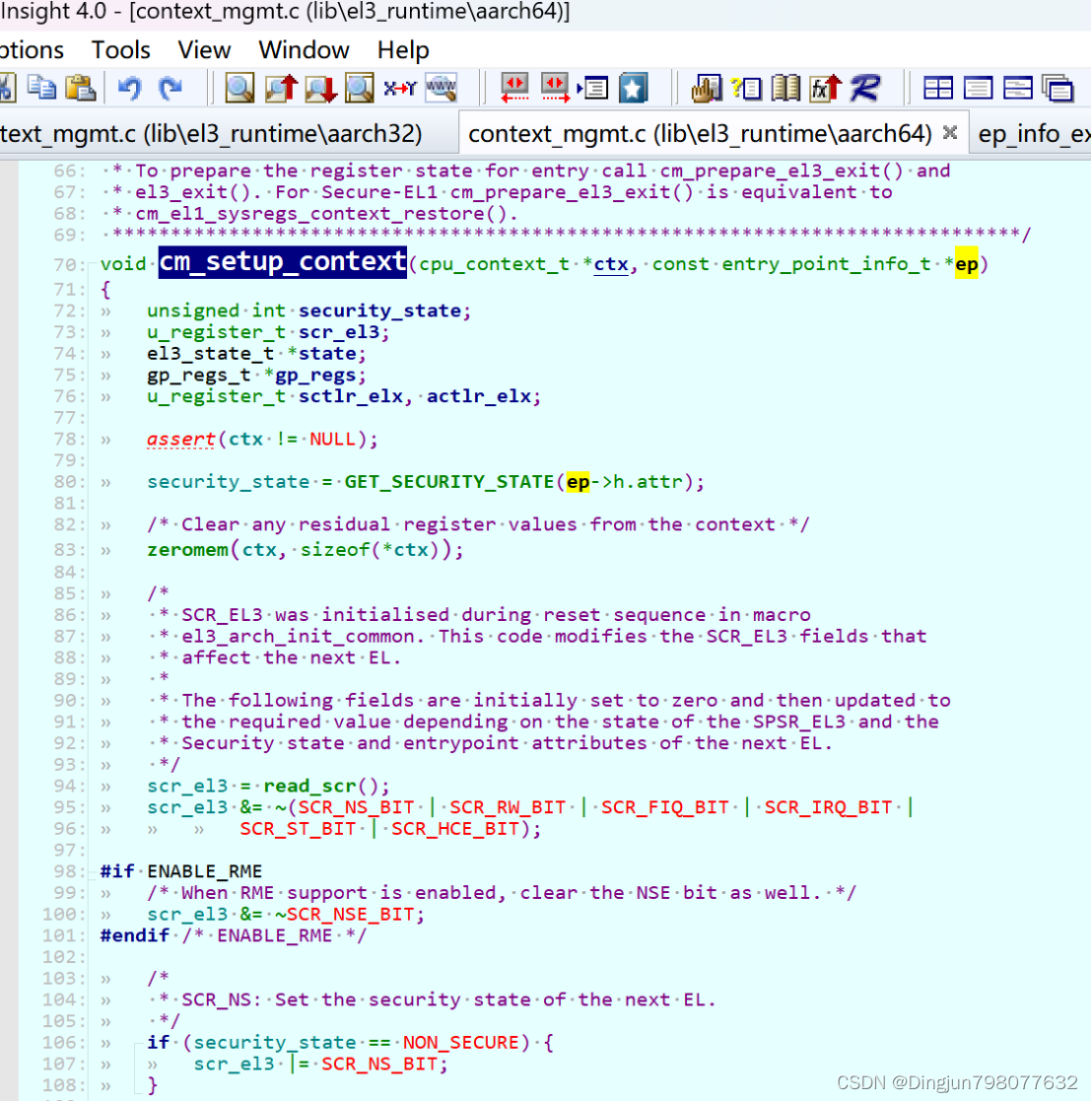
->cm_setup_context() //设置cpu上下文
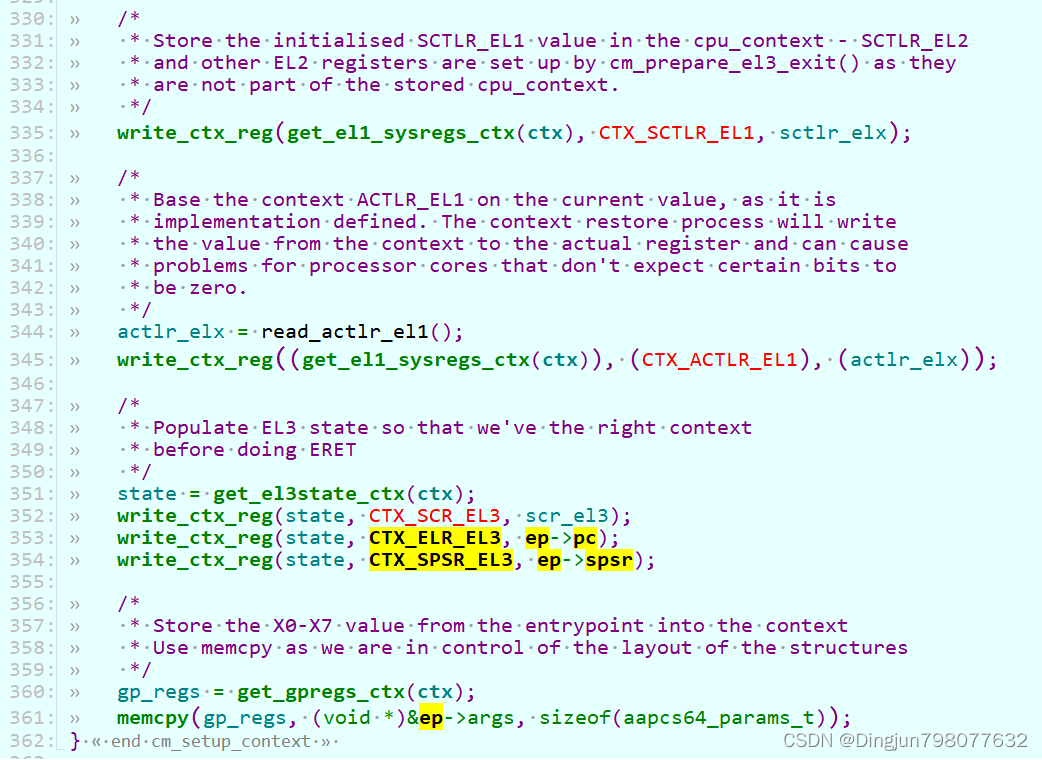
-> write_ctx_reg(state, CTX_SCR_EL3, scr_el3); //lib/el3_runtime/aarch64/context_mgmt.c
write_ctx_reg(state, CTX_ELR_EL3, ep->pc); //注: 异常返回时执行此地址 于是完成了cpu的启动!!!
write_ctx_reg(state, CTX_SPSR_EL3, ep->spsr);在psci_cpu_on中调用了psci_validate_entry_point和psci_cpu_on_start。
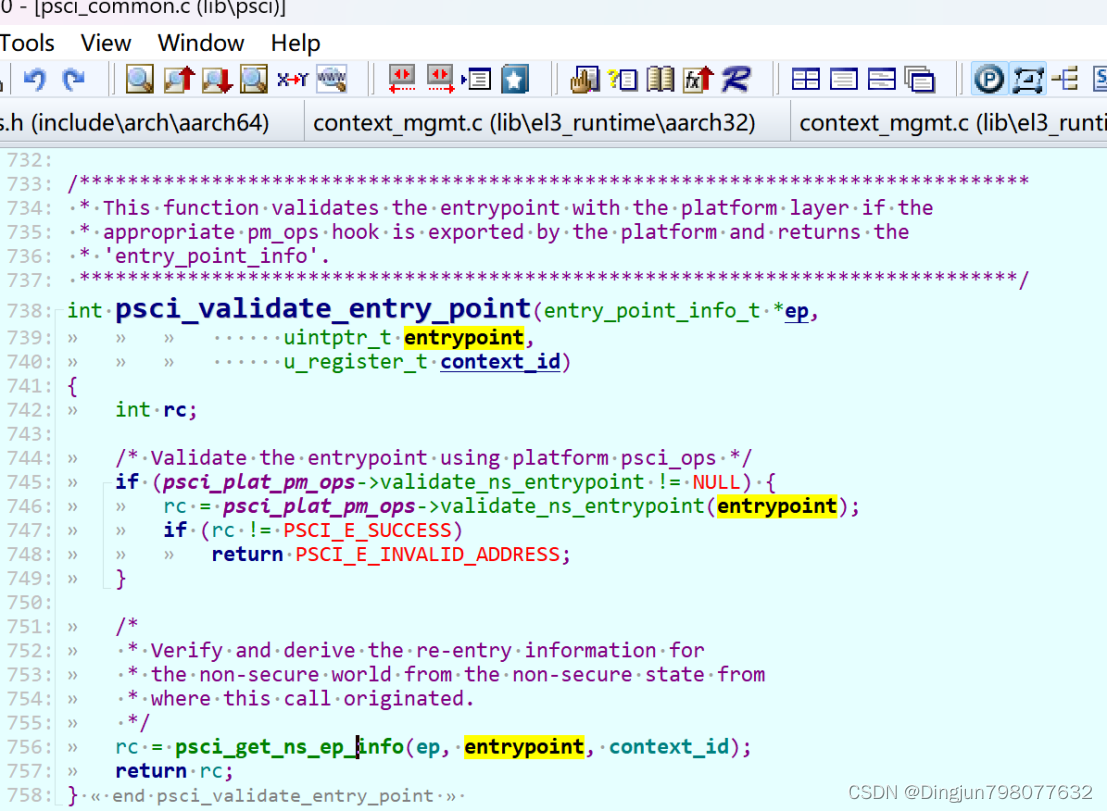
psci_validate_entry_point调用了psci_get_ns_ep_info将Linux SMC调用是x1寄存器保存的entry_point(secondary cpu在linux入口地址)保存到了ep->pc, 并且生成了ep->spsr。
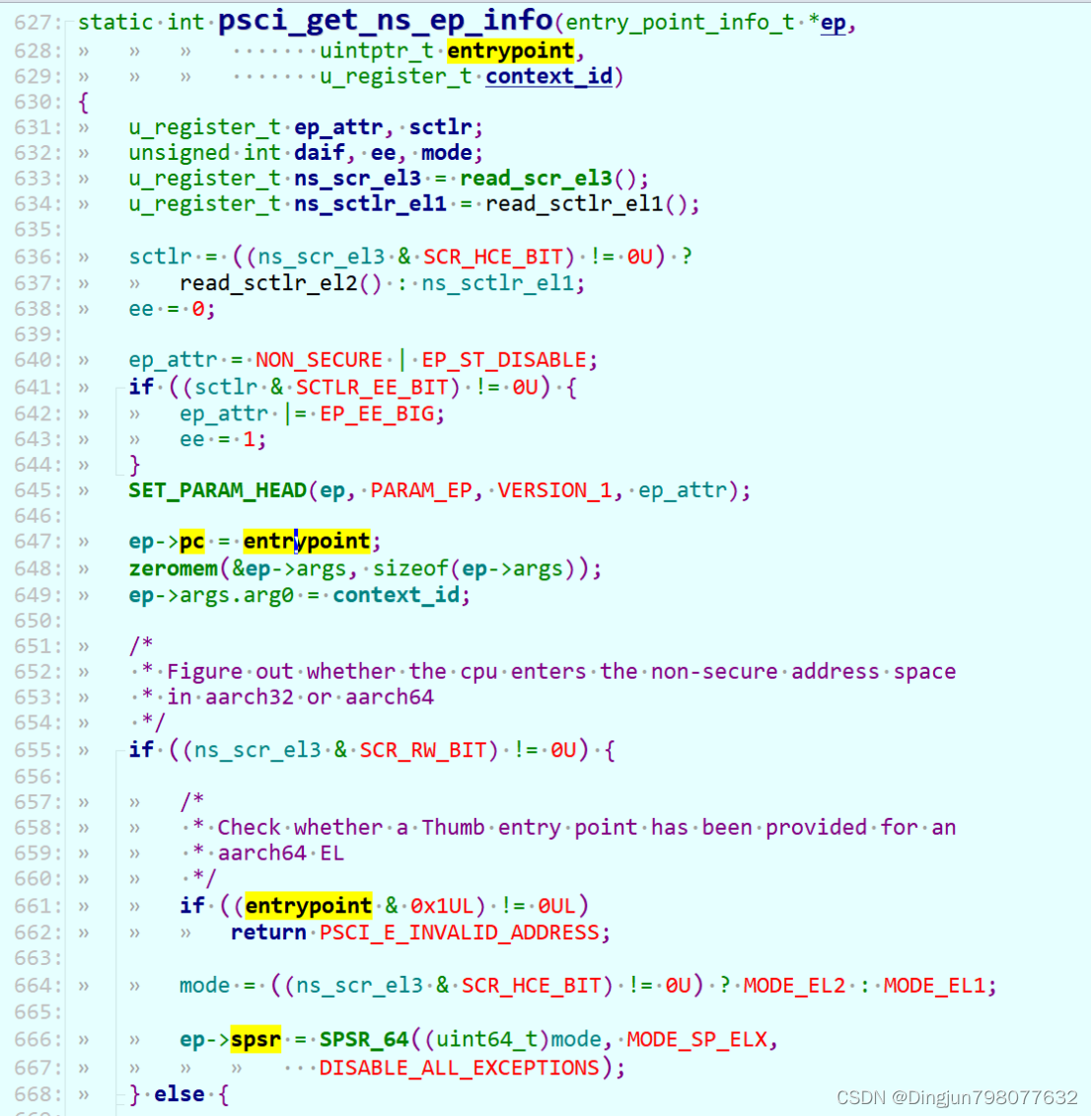
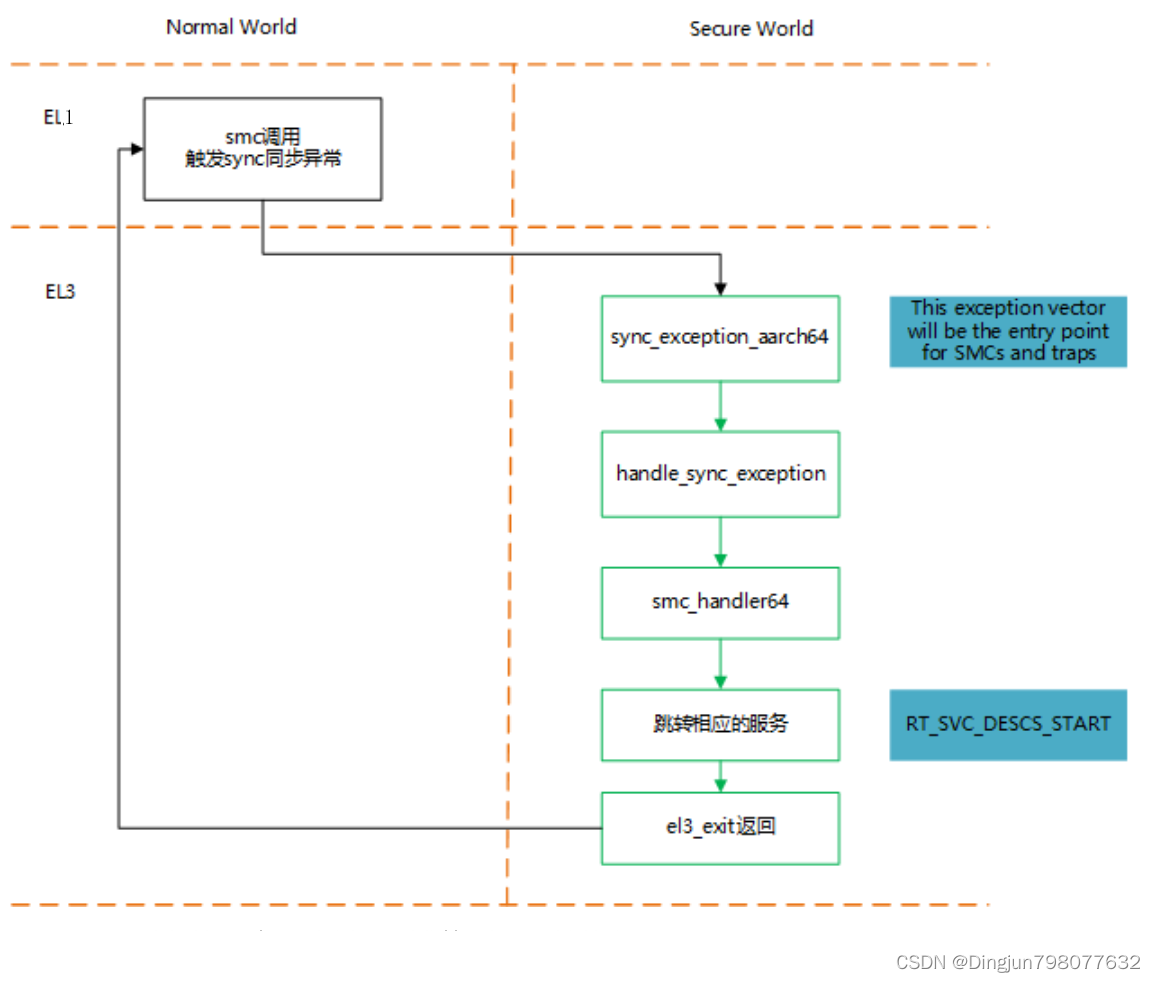
 把ep->pc、 ep->spsr保存到contex后,return后回到smc_handler64,接着调用el3_exit, el3_exit最终会调用eret回到el1,也就是Linxu内核中。
把ep->pc、 ep->spsr保存到contex后,return后回到smc_handler64,接着调用el3_exit, el3_exit最终会调用eret回到el1,也就是Linxu内核中。
这里给出一张SMC调用的大致流程图如下:
五、PSIC启动secondary cpu的处理
好像上文整个流程,secondary cpu就启动完成了,实际不是的。 上面的过程都是主CPU在处理,主处理器通过smc进入el3请求开核服务,atf中会响应这种请求,通过平台的开核操作来启动secondary cpu,并且设置从处理的一些寄存器如:scr_el3、spsr_el3、elr_el3,然后主处理器,恢复现场,eret再次回到el1(Linux内核)。psci_cpu_on主要完成开核的工作,然后会设置一些异常返回后寄存器的值(eg:从el1 -> el3 -> el1),重点关注 ep->pc写到cpu_context结构的CTX_ELR_EL3偏移处(从处理器启动后会从这个地址取指执行)。
而secondary cpu开核之后会从bl31_warm_entrypoint开始执行,在plat_setup_psci_ops中会设置(每个平台都有自己的启动地址寄存器,通过写这个寄存器来获得上电后执行的指令地址)。
bl31_warm_entrypoint代码如下,在el3_exit中会使用之前保存cpu_context结构中的数据,写入到cscr_el3、spsr_el3、elr_el3,最后通过eret指令使自己进入到Linxu内核。
*/
func bl31_warm_entrypoint
#if ENABLE_RUNTIME_INSTRUMENTATION
/*
* This timestamp update happens with cache off. The next
* timestamp collection will need to do cache maintenance prior
* to timestamp update.
*/
pmf_calc_timestamp_addr rt_instr_svc, RT_INSTR_EXIT_HW_LOW_PWR
mrs x1, cntpct_el0
str x1, [x0]
#endif
/*
* On the warm boot path, most of the EL3 initialisations performed by
* 'el3_entrypoint_common' must be skipped:
*
* - Only when the platform bypasses the BL1/BL31 entrypoint by
* programming the reset address do we need to initialise SCTLR_EL3.
* In other cases, we assume this has been taken care by the
* entrypoint code.
*
* - No need to determine the type of boot, we know it is a warm boot.
*
* - Do not try to distinguish between primary and secondary CPUs, this
* notion only exists for a cold boot.
*
* - No need to initialise the memory or the C runtime environment,
* it has been done once and for all on the cold boot path.
*/
el3_entrypoint_common \
_init_sctlr=PROGRAMMABLE_RESET_ADDRESS \
_warm_boot_mailbox=0 \
_secondary_cold_boot=0 \
_init_memory=0 \
_init_c_runtime=0 \
_exception_vectors=runtime_exceptions \
_pie_fixup_size=0
/*
* We're about to enable MMU and participate in PSCI state coordination.
*
* The PSCI implementation invokes platform routines that enable CPUs to
* participate in coherency. On a system where CPUs are not
* cache-coherent without appropriate platform specific programming,
* having caches enabled until such time might lead to coherency issues
* (resulting from stale data getting speculatively fetched, among
* others). Therefore we keep data caches disabled even after enabling
* the MMU for such platforms.
*
* On systems with hardware-assisted coherency, or on single cluster
* platforms, such platform specific programming is not required to
* enter coherency (as CPUs already are); and there's no reason to have
* caches disabled either.
*/
#if HW_ASSISTED_COHERENCY || WARMBOOT_ENABLE_DCACHE_EARLY
mov x0, xzr
#else
mov x0, #DISABLE_DCACHE
#endif
bl bl31_plat_enable_mmu
#if ENABLE_RME
/*
* At warm boot GPT data structures have already been initialized in RAM
* but the sysregs for this CPU need to be initialized. Note that the GPT
* accesses are controlled attributes in GPCCR and do not depend on the
* SCR_EL3.C bit.
*/
bl gpt_enable
cbz x0, 1f
no_ret plat_panic_handler
1:
#endif
#if ENABLE_PAUTH
/* --------------------------------------------------------------------
* Program APIAKey_EL1 and enable pointer authentication
* --------------------------------------------------------------------
*/
bl pauth_init_enable_el3
#endif /* ENABLE_PAUTH */
bl psci_warmboot_entrypoint
#if ENABLE_RUNTIME_INSTRUMENTATION
pmf_calc_timestamp_addr rt_instr_svc, RT_INSTR_EXIT_PSCI
mov x19, x0
/*
* Invalidate before updating timestamp to ensure previous timestamp
* updates on the same cache line with caches disabled are properly
* seen by the same core. Without the cache invalidate, the core might
* write into a stale cache line.
*/
mov x1, #PMF_TS_SIZE
mov x20, x30
bl inv_dcache_range
mov x30, x20
mrs x0, cntpct_el0
str x0, [x19]
#endif
b el3_exit
endfunc bl31_warm_entrypoint















 4143
4143

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









