







一、关于旋转轴的坐标转换矩阵
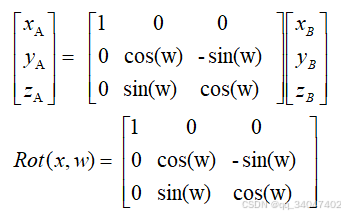
1.绕X轴的坐标旋转矩
即绕原来的坐标系A(比如世界坐标系)的X轴旋转w度得到新的坐标系B(比如用户坐标系);则P点在A中的坐标和在B中的坐标的关系如下:
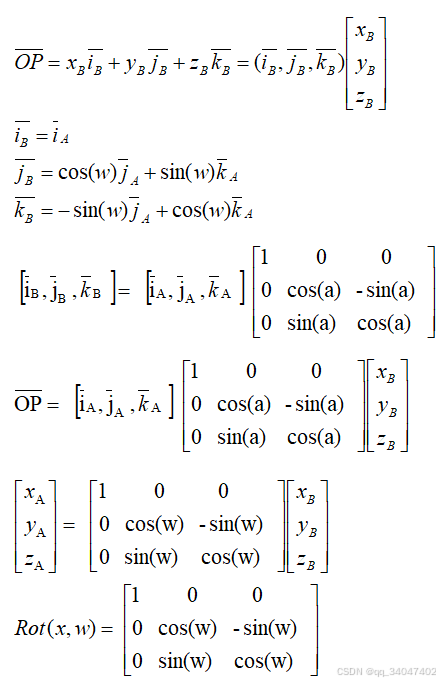
推导过程如下:
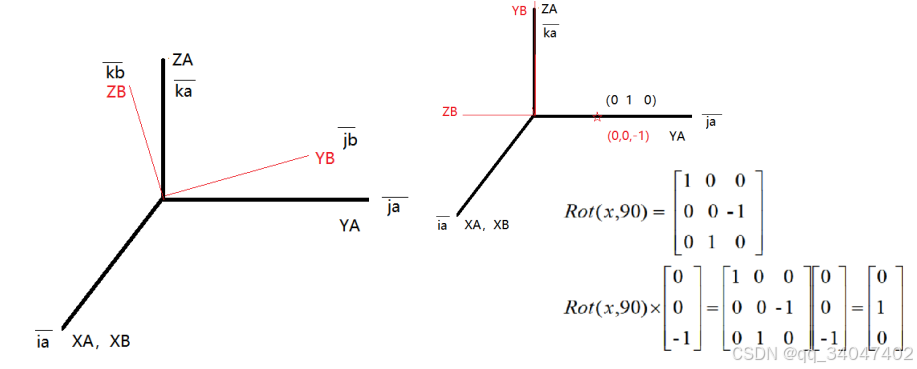
【例1】举例讲:如果绕X轴旋转90度,那么同样一个点在旧坐标系(A)中坐标为(0,1,0),在新的坐标系中就是:(0,0,-1)。见下图所示。
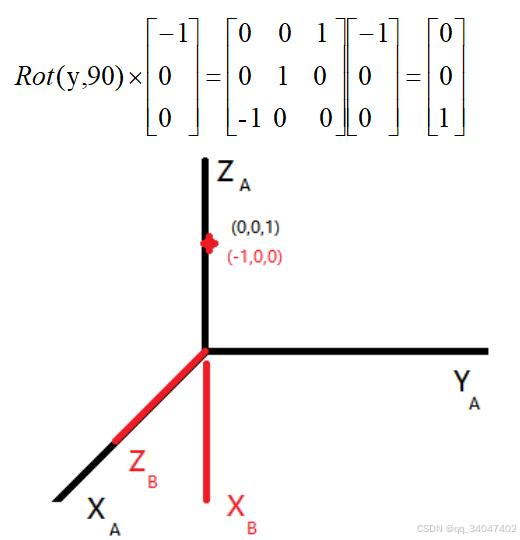
2.绕Y轴的坐标旋转矩阵
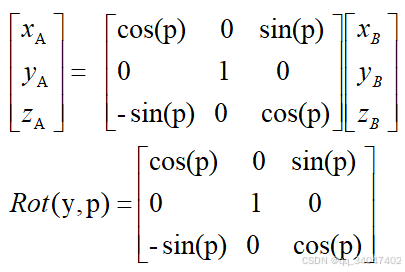
举例来说,若绕y轴旋转90度,则原来坐标(0,0,1)在新的坐标系下是(-1,0,0).验算如下
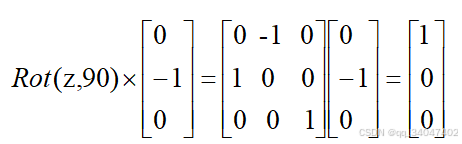
3.绕Z轴的坐标旋转矩阵
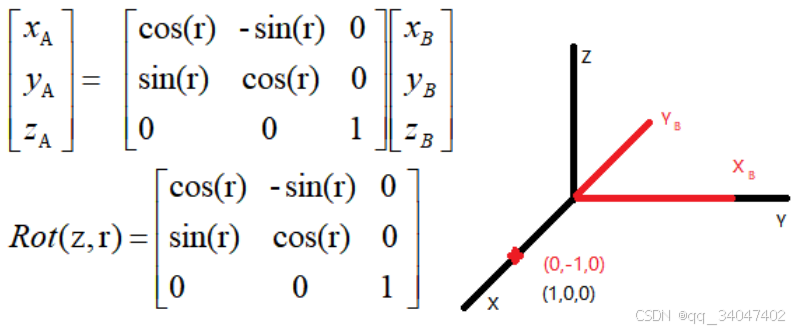
举例来说,若绕y轴旋转90度,则原来坐标(1,0,0)在新的坐标系下是(0,-1,0).验算如下
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 522
522

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











