







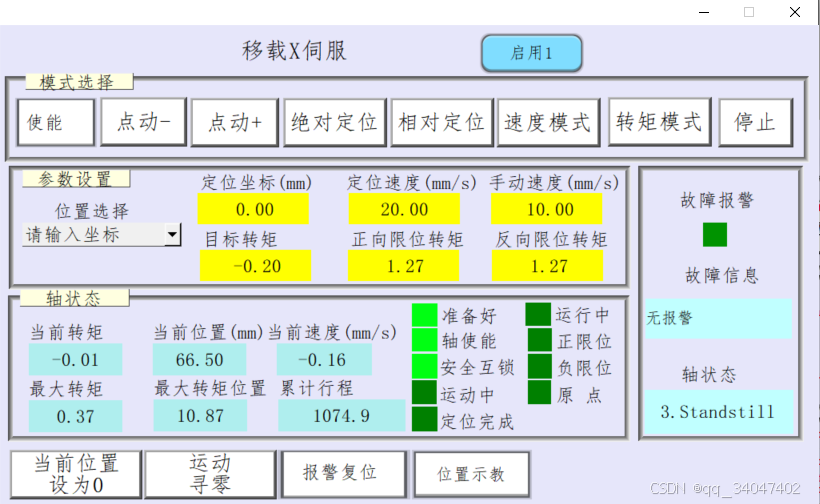
本文以一个实际例子,介绍ethercat伺服驱动器的工作原理,以及在汇川AM系列PLC中,如何点动、定位、速度、转矩控制ethercat伺服。内容如下:
全部代码可从:https://download.csdn.net/download/qq_34047402/90394357 处下载(含PLC+威纶通+文档)。
- 一、伺服运动控制的几个基本概念
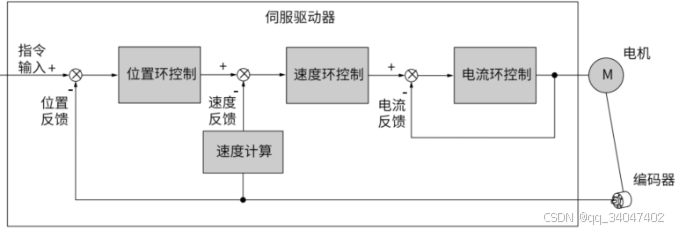
伺服系统由伺服驱动器、伺服电机和编码器三大主要部分构成,主要有如下的控制模式:
1).位置控制: 指通过位置指令控制电机的位置
2).速度控制: 指通过速度指令控制电机的速度
3).转矩控制:伺服电机的电流与转矩呈线性关系,因此,对电流的控制即能实现对转矩的控制
2.伺服支持的模式(以SV630N为例,支持7 种伺服模式)
该伺服支持的伺服模式主要有7种,汇川PLC控制该伺服时常用的有3种模式(回零模式、周期同步位置模式、周期同步转矩模式)。下面详细介绍。
| 设定值 |
伺服模式 |
|
| 1 |
PP( 轮廓位置模式 ) |
轮廓位置模式主要用于点对点定位应用。此模式下,上位机设定目标位置、运行速度、加减速, 伺服内部的 位置轨迹发生器将根据设置生成位置曲线指令,驱动器内部完成位置控制,速度控制,转矩控制 |
| 3 |
PV( 轮廓速度模式 ) |
轮廓速度模式下,上位控制器将目标速度、加速度、减速度发送给伺服驱动器,伺服驱动器自身规划速度指令曲线,速度、转矩调节由伺服驱动器内部执行 |
| 4 |
PT( 轮廓转矩模式 )< |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 8546
8546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











