






一、硬件介绍
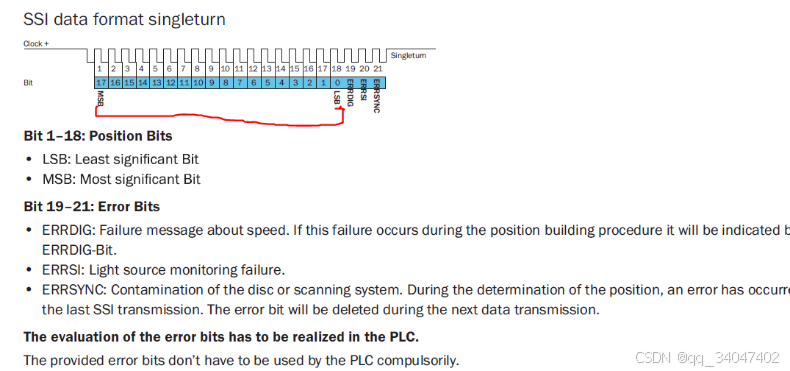
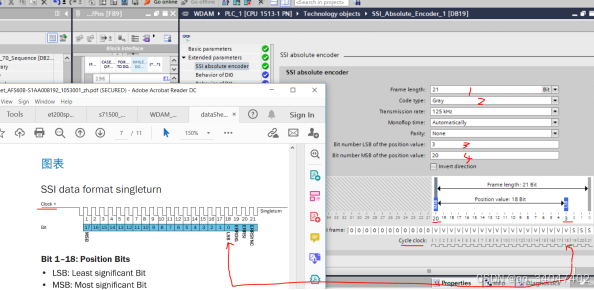
某项目使用SSI 接口编码器(AFS60B-S1AA262144)、 单圈绝对值. 18 bit, 意思是 1 圈= 3FFFF = 262144个脉冲。
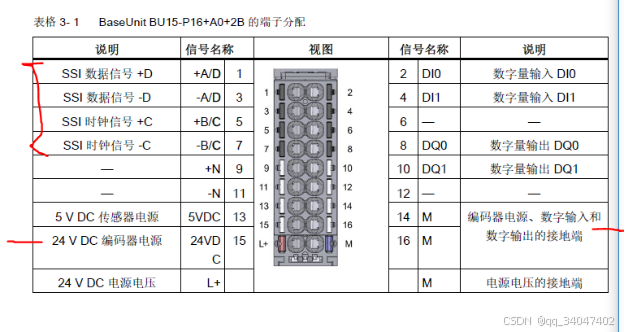
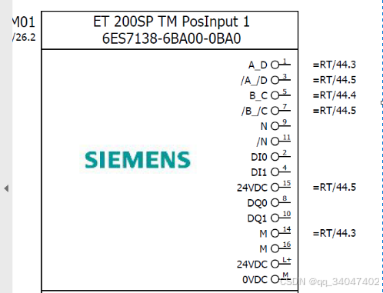
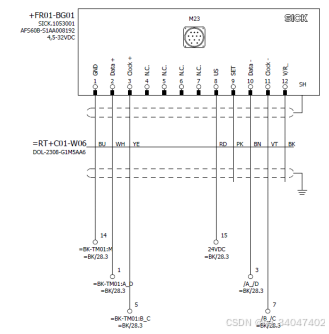
 二、接线
二、接线
三、硬件组态
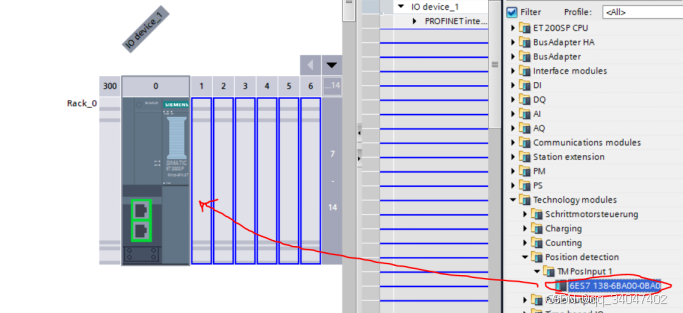
1.插入 TM posinput1 模块: 6ES7 138-6BA00-0BA0
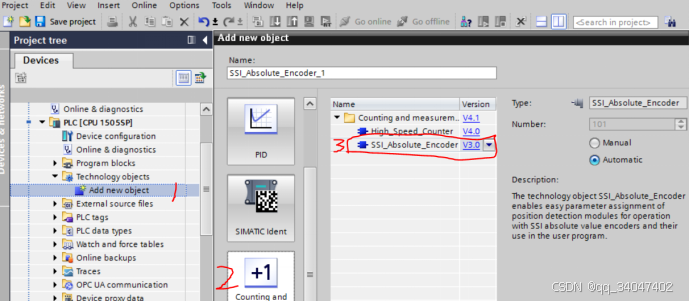
2、添加工艺对象
下图进行配置
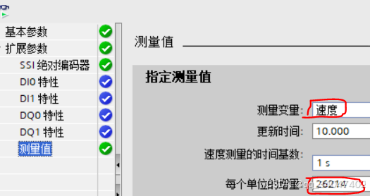
因为程序中需要速度,所以设置了指定测量值
,1 圈 = 262144 . 但是下图中设置不了那么大的数值,所以减小了10倍设置为 26214; 在程序中速度除以10进行了修正。速度的单位RPM(即1分钟多少圈)60

4.读编码器的数值:
"SSI_Absolute_Encoder_1"(Error=>#_EncoderError,
ErrorID=>#_EncoderErrorID,
PositionValue=>#_EncoderCurrentPos,
MeasuredValue=>#tEncoderCurrentSpeed);
CurrentAngle := DINT_TO_REAL(IN := #_EncoderCurrentPos) / 262144.0 * 360.0;
// 1s-26214; 1turn=262144,但是设置成了1秒26214,所以要除以10. 推测当时速度应该设置成100ms-//26214.就不用除以10了。
CurrentSpeed := #tEncoderCurrentSpeed / 10.0 * 60.0;


















 380
380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











