







【案例1】: 推动1kg的物体从原点到1米处,水平方向,无摩擦:
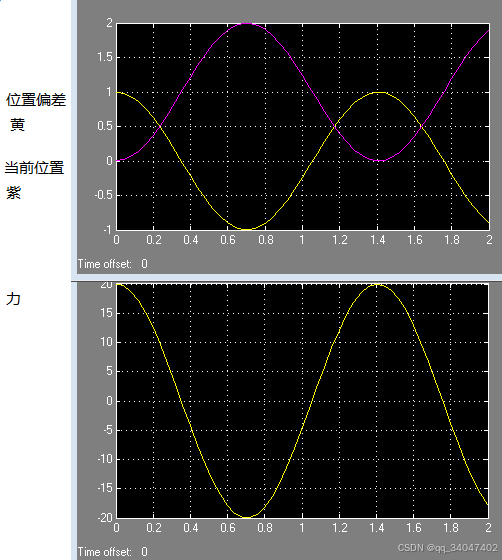
1. 只用比例(P)控制:PGain=20;,即F = 20 * (1 - x)。
下图在matlab中仿真可见其是震荡的。就是不考虑摩擦,小于目标位置1m时,力都是向右的,达到目标位置,力为0,但是因为有速度存在,还是会过冲过去。因为0-1米过程中力产生的动能,需要在1-2米路程中被相反的力消耗掉。可以想象人荡秋千的情况,如果没有空气阻力,则一直会荡下去。
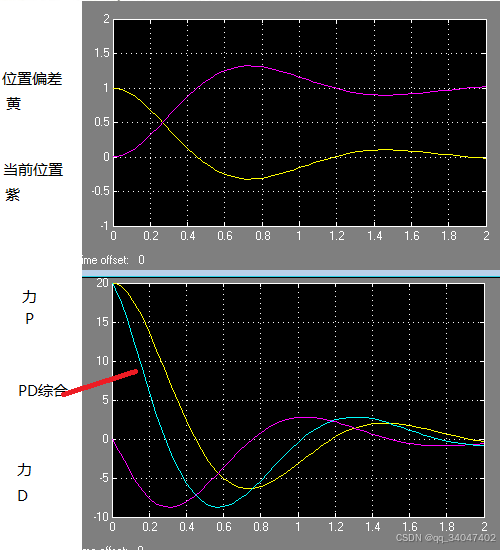
2 需要增加微分(D)控制.微分相当于提前刹车。因为靠近1的过程中err=1-X; X增大,err是变小的。err的微分是负数。让控制力变小。
F = kp * err + Td* err' = k * (1 -x) + Td * (1-x)'
因为 err = 1 - x 在0-1米过程中,随着x靠近1米的目标位置,err 是越来越小的,即err求导是负值。相当于微分的加入让向右的力小了一些。即提前刹车了,而且速度越快微分导致力减小的越多。
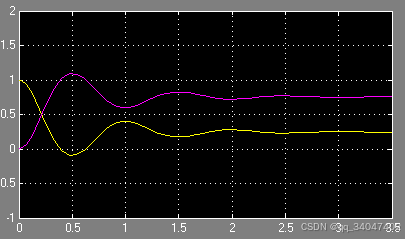
实验如下:.可见加入微分后,因为提前刹车,相当于增加了阻尼,会稳定下来。
PGain=20. DGain=3
3 因为本例在停在目标位置时,力=0即可,即不需要维持力,积分项为0即可
【案例2】:把1kg(9.8N)的物体从地面拉起到1米高处
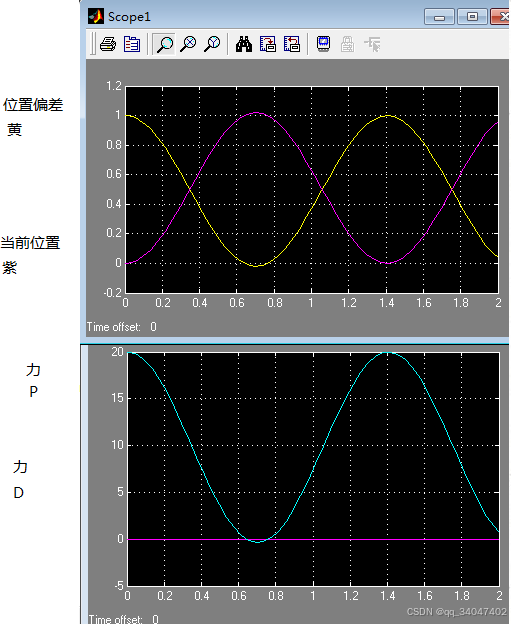
1 只用P控制:PGain=20; 即F = 20*(1-x),
此时因为比例系数偏小,因为到0.5m时,0.5*20=10N差不多已经等于下面的重量,但因为有速度存在,还是向上走但是已经开始减速了。而且到达比如1m的位置时拉力 F=0,但是重力会让它向下走
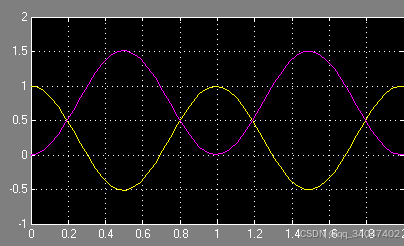
2.增大比例系数
增大比例系数到40.仍然震荡,只是最高可以上升到1.5米左右
.3 增加微分D控制
PGain=40; DGain=3;
F = kp * err + Td* err' = 40 * (1 -x) + 3 * (1-x)'
差不多稳定在0.755的位置,因为:40*(1-0.755)=9.8N正好等于重力。
虽然稳定,但是离目标位置1米,有0.245m的偏差,该偏差与比例系数的乘积 = 稳定所需的重力
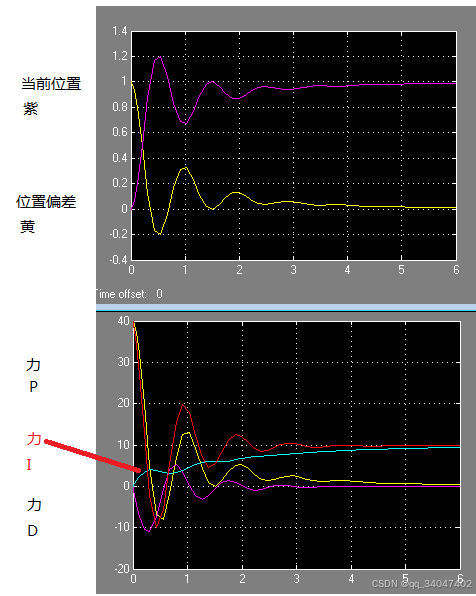
4.增加积分(I)控制
F = kp * err + Td* err' + 1/Ti * (err积分)
积分消除稳态误差的原理是因为 只要没有达到目标位置,err就累加,会增大F,让它向目标位置靠近。
P=40; I=20;D=3;
【积分饱和的问题】
在P=40; I=20;D=3;的情况下,但是如果去距离20m的位置;
因为开始偏差太大,去目标值20m花费时间很长,导致积分数值很大,导致积分项很大
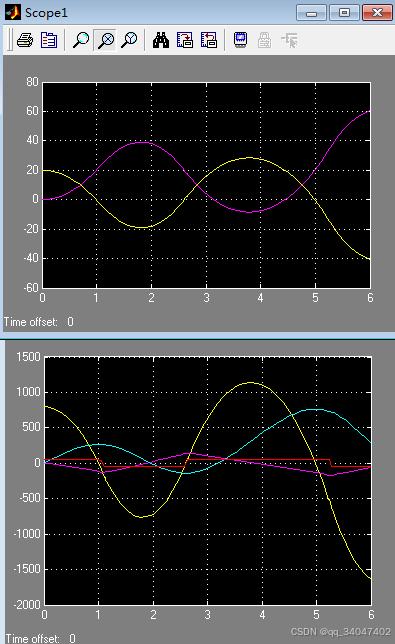
解决积分饱和的方法很多,比如限制积分的范围,在接近目标的区域才开始积分。比如偏差在4m的时候进行积分。那么就可以稳定
【已有知识的利用】
比如我知道它是9.8N左右。直接用下面的式子也可以。不过此时所需比例系数肯定要小很多。
F = 9+ kp * err + Td* err' + 1/Ti * (err积分)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











