







因为本人电路水平一般,最近使用运动控制卡做项目时,发现了运动控制卡数字量接线的电路图看着有点懵,所以网上查了一些资料,汇总如下:
1、什么是NPN?

1)可以简单的记忆为有箭头的为发射极
2)和竖线同在一侧的是发射极和集电极;
3)竖线单独一侧的是基极;
工作原理如下:
三极管是一种控制元件,主要用来控制电流的大小,以共发射极接法为例(信号从基极输入,从集电极输出,发射极接地),当基极电压UB有一个微小的变化时,基极电流IB也会随之有一小的变化,受基极电流IB的控制,集电极电流IC会有一个很大的变化,基极电流IB越大,集电极电流IC也越大,反之,基极电流越小,集电极电流也越小,即基极电流控制集电极电流的变化。但是集电极电流的变化比基极电流的变化大得多,这就是三极管的放大作用。IC 的变化量与IB变化量之比叫做三极管的放大倍数β(β=ΔIC/ΔIB, Δ表示变化量),三极管的放大倍数β一般在几十到几百倍。
三极管放大信号
三极管在放大信号时,首先要进入导通状态,即要先建立合适的静态工作点,也叫 建立偏置 ,否则会放大失真。
如上图所示,我们把从基极B流至发射极E的电流叫做基极电流Ib;把从集电极C流至发射极E的电流叫做集电极电流Ic。这两个电流的方向都是流出发射极的,所以发射极E上就用了一个箭头来表示电流的方向。
三极管放大作用
集电极电流受基极电流的控制(假设电源能够提供给集电极足够大的电流的话),并且基极电流很小的变化,会引起集电极电流很大的变化,且变化满足一定的比例关系:集电极电流的变化量是基极电流变化量的β倍,即电流变化被放大了β倍,所以我们把β叫做三极管的放大倍数(β一般远大于1,例如几十,几百)。如果我们将一个变化的小信号加到基极跟发射极之间,这就会引起基极电流Ib的变化,Ib的变化被放大后,导致了Ic很大的变化。如果集电极电流Ic是流过一个电阻R的,那么根据电压计算公式U=RI可以算得,这电阻上电压就会发生很大的变化。我们将这个电阻上的电压取出来,就得到了放大后的电压信号了。

结论:
根据以上可知,当左边可编程控制器NPN三极管不导通时,U=RI,由于集电极电流很小,相当于集电极和发射极之间电阻很大,所以C0、X0之间电压很小,X0为24V,驱动器就不会被导通;当左边可编程控制器NPN三极管导通时,由于集电极电流很大,相当于集电极和发射极之间电阻很小,X0为0V,C0和X0之间电压为24V,驱动器就会被导通。NPN由于在有信号时,输出端C0处于低电位,所以也被称为低电平有效,这里还有个要注意的就是Sink逻辑就是NPN。
2、什么是PNP?
PNP型工作流程:

E是发射极;B是基极;C是集电极;
区分NPN还是PNP可以根据,箭头指向竖线就是PNP,箭头远离竖线就是NPN;

结论:
根据以上可知,当左边可编程控制器PNP三极管不导通时,U=R*I,由于集电极电流很小,相当于集电极和发射极之间电阻很大,所以C0、X0之间电压很小,X0为0V,驱动器就不会被导通;当左边可编程控制器PNP三极管导通时,由于集电极电流很大,相当于集电极和发射极之间电阻很小,X0为24V,X0和C0之间电压为24V,驱动器就会被导通。PNP由于在有信号时,输出端X0处于高电位,所以也被称为高电平有效,这里还有个要注意的就是源逻辑就是PNP。
应用案例:
三线式接近开关的接线方法:
对于三线式NPN型接近开关,棕色的导线与一端负载,同时与电源正极相连;黑色的导线是信号线,与负载的另一端相连;蓝色的导线与电源负极相连。
c对于三线式PNP型接近开关,棕色的导线与电源正极相连;黑色的导线是信号线,与负载的一端相连;蓝色的导线与负载的另一端及电源负极相连。
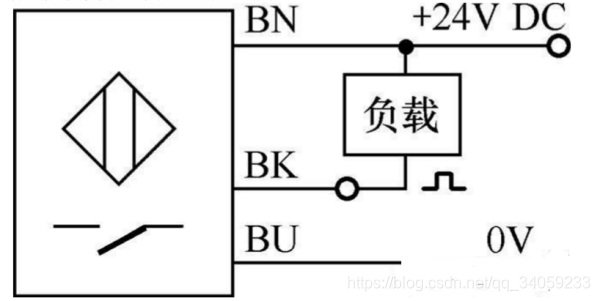
对于PLC而言,由于其内部具有24的直流电路,所以我们将NPN三线开关的信号线BK直接接在Plc的输入端就好,对于运动控制卡而言,如果没有一些扩展模块的话,我们一般需要额外的直流电源先给这个所谓的负载供电,然后再将BK信号线接在输入端,这里以研华1203控制卡为例:
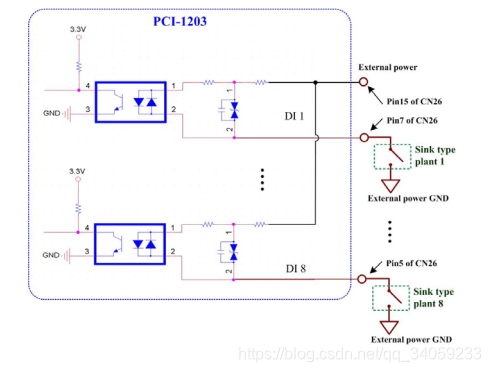
这里的数字量输入就需要接外部电源,这里大的Sink type的意思经过查询得知就是NPN的意思,NPN无信号时,将信号输入端Pin7的电平拉到高位,所以DI没有压差,对运动控制卡来说无输入,图4端为高电平;当NPN有信号时,将信号输入端Pin7的电平拉到低位,DI产生压差,对运动控制卡来说有输入,图4端为低电平,所以对运功控制卡的4端来所是低电平有效?
对于凌华科技的AMP-204C运动控制年也是一样的道理,看下图:
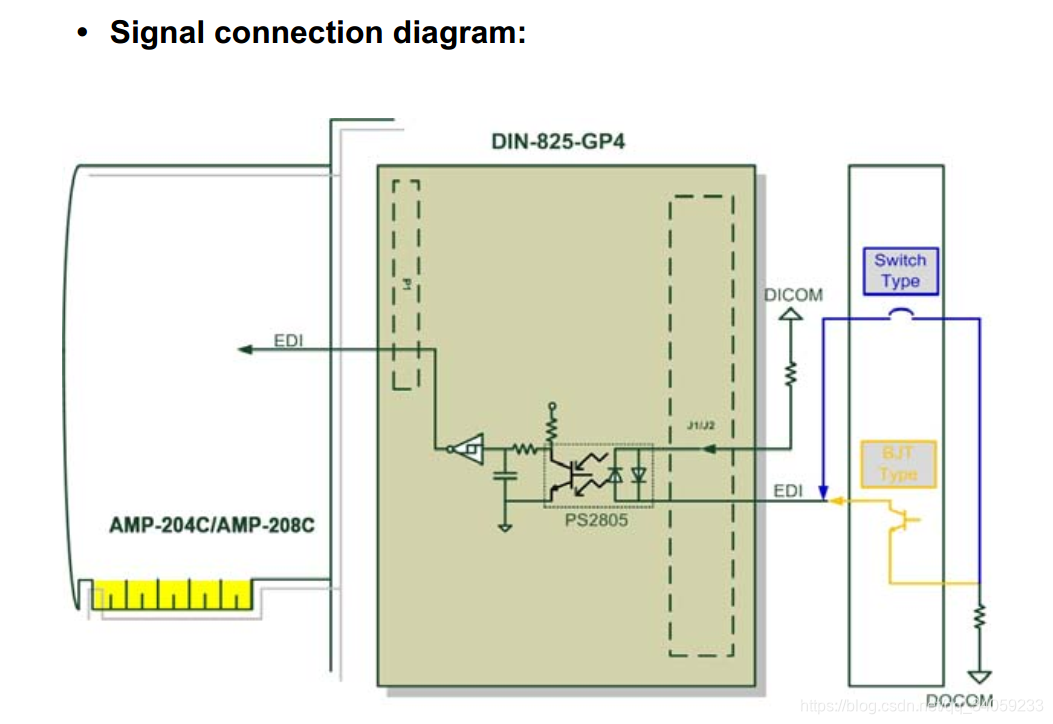
这里要分析BJT type晶体管是NPN还是PNP,判别方法如下:
箭头指向基极则为PNP,箭头背离基极则为NPN,从上图看是箭头背离基极,故为NPN,既然控制卡需要的是NPN输入,则接法和研华1203一致,且我们选取数字量输入的一些仪器时,比如接近开关,一定要选择NPN输出的。c


















 796
796

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











