










文章目录
喜欢的话请关注我们的微信公众号~《你好世界炼丹师》。
- 公众号主要讲统计学,数据科学,机器学习,深度学习,以及一些参加Kaggle竞赛的经验。
- 公众号内容建议作为课后的一些相关知识的补充,饭后甜点。
- 此外,为了不过多打扰,公众号每周推送一次,每次4~6篇精选文章。
微信搜索公众号:你好世界炼丹师。期待您的关注。
1.概述
1.1 什么是TSNE
- TSNE是由T和SNE组成,T分布和随机近邻嵌入(Stochastic neighbor Embedding).
- TSNE是一种可视化工具,将高位数据降到2-3维,然后画成图。
- t-SNE是目前效果最好的数据降维和可视化方法
- t-SNE的缺点是:占用内存大,运行时间长。
1.2 TSNE原理
1.2.1入门的原理介绍
举一个例子,这是一个将二维数据降成一维的任务。我们要怎么实现?
首先,我们想到的最简单的方法就是舍弃一个维度的特征,将所有点映射到x轴上:
很明显,结果来看,蓝色和黄色的点交叠在一起,可是他们在二维上明明不属于一类
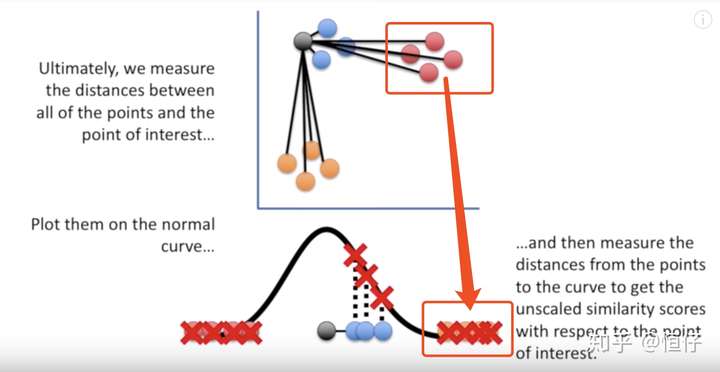
TSNE就是计算某一个点到其他所有点的距离,然后映射到t分布上,效果就会好一些。
1.2.2进阶的原理介绍
- t-SNE的降维关键:把高纬度的数据点之间的距离转化为高斯分布概率。
1.2.2.1 高维距离表示
- 如果两个点在高维空间距离越近,那么这个概率值越大。
- 我们来看下面公式,两个公式的内容一致,只是写法不同。
P j ∣ i = e − ∣ ∣ x i − x j ∣ ∣ 2 2 σ i 2 ∑ i ≠ k e − ∣ ∣ x i − x k ∣ ∣ 2 2 σ i 2 P_{j|i} = \frac{e^{\frac{-||x_i-x_j||^2}{2\sigma_i^2}}}{\sum_{i\not=k}e^{\frac{-||x_i-x_k||^2}{2\sigma_i^2}}} Pj∣i=∑i=ke2σi2−∣∣xi−xk∣∣2e2σi2−∣∣xi−xj∣∣2
这个形式的公式,只是明显的展示这是高斯分布概率
P
j
∣
i
=
e
x
p
(
−
∣
∣
x
i
−
x
k
∣
∣
2
/
(
2
σ
i
2
)
)
∑
i
≠
k
e
x
p
(
−
∣
∣
x
i
−
x
k
∣
∣
2
/
(
2
σ
i
2
)
)
P_{j|i} = \frac{exp(-||x_i-x_k||^2/(2\sigma_i^2))}{\sum_{i\not=k}exp(-||x_i-x_k||^2/(2\sigma_i^2))}
Pj∣i=∑i=kexp(−∣∣xi−xk∣∣2/(2σi2))exp(−∣∣xi−xk∣∣2/(2σi2))
∣
∣
x
i
−
x
k
∣
∣
2
||x_i-x_k||^2
∣∣xi−xk∣∣2是两个点之间的距离;
距离越大,
e
x
p
(
−
∣
∣
x
i
−
x
k
∣
∣
2
/
(
2
σ
i
2
)
)
exp(-||x_i-x_k||^2/(2\sigma_i^2))
exp(−∣∣xi−xk∣∣2/(2σi2))越小;
距离越小,
e
x
p
(
−
∣
∣
x
i
−
x
k
∣
∣
2
/
(
2
σ
i
2
)
)
exp(-||x_i-x_k||^2/(2\sigma_i^2))
exp(−∣∣xi−xk∣∣2/(2σi2))越大;
分母是一个常数,对于一个固定的点
x
i
x_i
xi;
- 这个算法的创新点: σ i \sigma_i σi对于每一个 x i x_i xi都是不同的,是由事先设定的困惑性影响, σ i \sigma_i σi是自动设定的。
现在我们能得到
p
j
∣
i
p_{j|i}
pj∣i,然后计算联合分布
P
i
j
=
P
j
∣
i
+
P
i
∣
j
2
N
P_{ij} = \frac{P_{j|i}+P_{i|j}}{2N}
Pij=2NPj∣i+Pi∣j
- 从上文中,我们用高斯分布概率来表示两个高维点之间的相似性,再次复述一次两个点越相似, p i j p_{ij} pij越大
1.2.2.2 低维相似度表示
- 在低纬度中,我们使用t分布来表示相似性。这里不探究为什么使用t分布而不是其他分布,具体内容可以看论文
Q
i
j
=
(
1
+
∣
∣
y
i
−
y
j
∣
∣
2
)
−
1
∑
k
≠
l
(
1
+
∣
∣
y
k
−
y
l
∣
∣
2
)
−
1
Q_{ij} = \frac{(1+||y_i-y_j||^2)^{-1}}{\sum_{k\not=l}(1+||y_k-y_l||^2)^{-1}}
Qij=∑k=l(1+∣∣yk−yl∣∣2)−1(1+∣∣yi−yj∣∣2)−1
y
i
,
y
j
y_i,y_j
yi,yj是低纬度的点
1.2.2.3 惩罚函数
- 现在我们有方法衡量高纬度和低纬度的点的相似性,我们如何保证高纬度相似度高的点在低纬度相似度也高?
- t-SNE使用的是KL散度(Kullback-Leibler divergence)
K L ( P ∣ Q ) = ∑ i ≠ j P i j log P i j Q i j KL(P|Q) = \sum_{i\not=j}P_{ij}\log\frac{P_{ij}}{Q_{ij}} KL(P∣Q)=i=j∑PijlogQijPij
1.2.2.4 为什么是局部相似性
- 当 P i j P_{ij} Pij很大, Q i j Q_{ij} Qij很小(高维空间距离近,低维空间距离远)的惩罚很大,但是高维空间距离远,低维空间距离近的惩罚小。
1.2.2.5 为什么选择高斯和t分布
- 降维必然带来信息损失,TSNE保留局部信息必然牺牲全局信息,而因为t分布比 高斯分布更加长尾,可以一定程度减少这种损失。
2 python实现
函数参数表:
- parameters 描述
- n_components 嵌入空间的维度
- perpexity 混乱度,表示t-SNE优化过程中考虑邻近点的多少,默认为30,建议取值在5到50之间
- early_exaggeration 表示嵌入空间簇间距的大小,默认为12,该值越大,可视化后的簇间距越大
- learning_rate 学习率,表示梯度下降的快慢,默认为200,建议取值在10到1000之间
- n_iter 迭代次数,默认为1000,自定义设置时应保证大于250
- min_grad_norm 如果梯度小于该值,则停止优化。默认为1e-7
- metric 表示向量间距离度量的方式,默认是欧氏距离。如果是precomputed,则输入X是计算好的距离矩阵。也可以是自定义的距离度量函数。
- init 初始化,默认为random。取值为random为随机初始化,取值为pca为利用PCA进行初始化(常用),取值为numpy数组时必须shape=(n_samples, n_components)
- verbose 是否打印优化信息,取值0或1,默认为0=>不打印信息。打印的信息为:近邻点数量、耗时、σ
、KL散度、误差等 - random_state 随机数种子,整数或RandomState对象
- method 两种优化方法:barnets_hut和exact。第一种耗时O(NlogN),第二种耗时O(N^2)但是误差小,同时第二种方法不能用于百万级样本
- angle 当method=barnets_hut时,该参数有用,用于均衡效率与误差,默认值为0.5,该值越大,效率越高&误差越大,否则反之。当该值在0.2-0.8之间时,无变化。
import numpy as np
import matplotlib.pyplot as plt
from sklearn import manifold,datsets
'''X是特征,不包含target;X_tsne是已经降维之后的特征'''
tsne = manifold.TSNE(n_components=2, init='pca', random_state=501)
X_tsne = tsne.fit_transform(X)
print("Org data dimension is {}.
Embedded data dimension is {}".format(X.shape[-1], X_tsne.shape[-1]))
'''嵌入空间可视化'''
x_min, x_max = X_tsne.min(0), X_tsne.max(0)
X_norm = (X_tsne - x_min) / (x_max - x_min) # 归一化
plt.figure(figsize=(8, 8))
for i in range(X_norm.shape[0]):
plt.text(X_norm[i, 0], X_norm[i, 1], str(y[i]), color=plt.cm.Set1(y[i]),
fontdict={'weight': 'bold', 'size': 9})
plt.xticks([])
plt.yticks([])
plt.show()















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}
{kind=link}