







ROS是一个分布式系统,一个ROS系统可以有多个节点。电脑在与数莓派进行联调时可将电脑设置为ROS系统的一个节点。在此,我将数莓派作为master,电脑作为节点进行网络配置。
首先,在数莓派中输入
ifconfig获取数莓派的ip地址,我这里是192.168.1.0
然后在自己电脑terminal中输入
ifconfig获取电脑的ip地址,我这里是192.168.1.1,注意,电脑和数莓派要在同一个网段。
在电脑中输入
sudo gedit /etc/hosts
添加 : ip地址 robot1 并保存。
在电脑中输入
sudo gedit ~/.bashrc
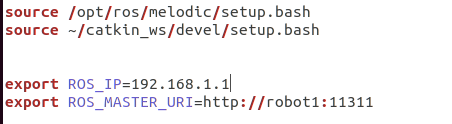
添加 export ROS_IP=电脑ip,和 export ROS_MASTER_URI=http:/robot1:11311(robot1代表上面配置的ip地址)。
然后source一下:
source ~/.bashrc在电脑端新开一个terminal,输入
ssh xxxrobot@robot1使用ssh进入数莓派,再使用命令
sudo vi /etc/hosts与电脑端配置类似,将电脑的ip写入数莓派hosts。
最后在ssh连接的数莓派terminal中输入
roscore另外再开一个终端用ssh连接数莓派t,在erminal中输入
rosrun rospy_tutorials listener.py在电脑端未进行ssh连接的terminal中输入
rosrun rospy_tutorials talker.py如果在listener中能收到talker发出的消息,则证明网络连接成功。















 2808
2808











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









