







作者:CSDN @ _养乐多_
本文介绍了通过Google Earth Engine平台,并使用哨兵数据提取水体掩膜的方法和代码。通过裁剪和去除云等处理步骤,最终得到具有水体掩膜的影像,并进行可视化和导出。这种方法基于归一化水体指数(NDWI)和OTSU阈值计算技术,无需复杂的图像处理算法,适用于快速获取水体信息的需求。
 图1 彩色合成 图1 彩色合成
|
 图2 水体掩膜 图2 水体掩膜
|
一、OTSU阈值方法
1.1 原理
OTSU阈值方法是一种常用的图像分割算法,用于将图像分成背景和目标两个部分。在提取水体的应用中,可以使用OTSU阈值方法来自动分割水体和非水体区域。
OTSU阈值方法基于图像的灰度直方图,通过寻找最佳的阈值来实现分割。以下是OTSU阈值方法的原理步骤:
-
计算图像的灰度直方图:首先,将图像转换为灰度图像,并统计每个灰度级别的像素数量。这样可以得到图像的灰度直方图。
-
计算像素的总数:统计图像中的总像素数。
-
计算类间方差:选择一个阈值T,将图像分成两个类别:低于阈值T的像素类别为背景,高于阈值T的像素类别为目标(水体)。然后,计算两个类别的权重、均值和方差,并使用这些值来计算类间方差。类间方差是一个衡量分割质量的指标,当类间方差最大时,分割效果最佳。
-
寻找最大类间方差:通过遍历所有选择的阈值T,计算类间方差,并找到使类间方差最大的阈值T*。
-
应用阈值分割:将图像的每个像素与阈值T*进行比较,将像素分为水体和非水体两个部分。
-
OTSU阈值方法的原理是基于类间方差最大化的思想。通过最大化类间方差,可以实现最佳的分割效果,将水体和非水体区域有效地分开。这种方法不需要预先设定阈值,而是通过自动计算得到最优的阈值,因此具有较好的适应性和稳定性。
在应用中,可以将OTSU阈值方法应用于水体提取任务,通过对输入图像进行OTSU阈值分割,得到水体和非水体区域的二值图像,从而实现水体的提取和分割。
1.2 直方图
将像素直方图和类内方差最大的像素值打印出来,如下图所示。
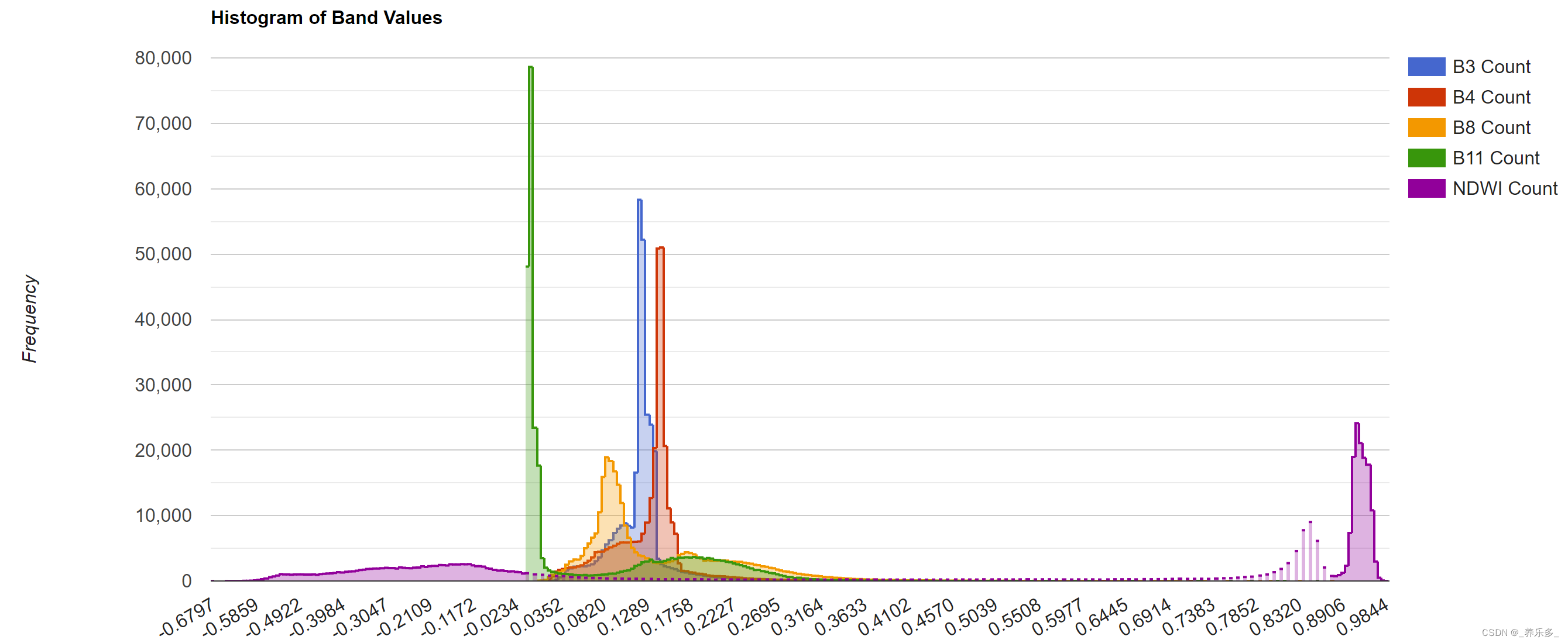
用于演示阈值的示例链接(将像素直方图和类内方差最大的像素值打印了出来):https://code.earthengine.google.com/4396f8dd90c07f824f132c568e350775?noload=true
二、代码详解
var roi = table
Map.centerObject(roi,10)
// 可视化参数
var palette = ['FFFFFF', 'CE7E45', 'DF923D', 'F1B555', 'FCD163', '99B718',
'74A901', '66A000', '529400', '3E8601', '207401', '056201',
'004C00', '023B01', '012E01', '011D01', '011301'];
//可视化参数,按843波段合成
var rgbVis = {
min: 0.0,
max: 0.35,
bands: ['B8', 'B4', 'B3'],
};
//按矢量边界裁剪
function roiClip(image){
return image.clip(roi)
}
//S2_SR去云
function remove_cloud(image) {
var qa = image.select('QA60')
var cloudBitMask = 1 << 10;
var cirrusBitMask = 1 << 11;
var mask = qa.bitwiseAnd(cloudBitMask).eq(0).and(qa.bitwiseAnd(cirrusBitMask).eq(0))
return image.updateMask(mask).divide(10000).select("B.*").copyProperties(image, ["system:time_start"])
}
//时间范围
var startDate = ee.Date('2020-01-01');
var endDate = ee.Date('2020-02-01');
//数据集选择
var S2 = ee.ImageCollection("COPERNICUS/S2_SR")
.filterDate(startDate, endDate)
.select('B3', 'B4', 'B8', 'B11', 'QA60')
.filterBounds(roi)
.filter(ee.Filter.lt('CLOUDY_PIXEL_PERCENTAGE', 5))
.map(remove_cloud)
.map(roiClip)
//运行同一天影像
var newImgS2 = S2.max();
print(newImgS2)
Map.addLayer(newImgS2, rgbVis, 'newImg_RGB');
//计算NDWI
function calNDWI(image)
{
var NDWI = image.normalizedDifference(['B3', 'B11']).rename('NDWI');
NDWI = NDWI.updateMask(NDWI.gt(-1).and(NDWI.lt(1)));
return image.addBands(NDWI);
}
//OTSU计算阈值
function otsu(histogram) {
var counts = ee.Array(ee.Dictionary(histogram).get('histogram'));
var means = ee.Array(ee.Dictionary(histogram).get('bucketMeans'));
var size = means.length().get([0]);
var total = counts.reduce(ee.Reducer.sum(), [0]).get([0]);
var sum = means.multiply(counts).reduce(ee.Reducer.sum(), [0]).get([0]);
var mean = sum.divide(total);
var indices = ee.List.sequence(1, size);
var bss = indices.map(function(i) {
var aCounts = counts.slice(0, 0, i);
var aCount = aCounts.reduce(ee.Reducer.sum(), [0]).get([0]);
var aMeans = means.slice(0, 0, i);
var aMean = aMeans.multiply(aCounts)
.reduce(ee.Reducer.sum(), [0]).get([0])
.divide(aCount);
var bCount = total.subtract(aCount);
var bMean = sum.subtract(aCount.multiply(aMean)).divide(bCount);
return aCount.multiply(aMean.subtract(mean).pow(2)).add(
bCount.multiply(bMean.subtract(mean).pow(2)));
});
return means.sort(bss).get([-1]);
}
//计算水体掩膜
function calWaterMask(image){
var MNDWI_S2 = image.select("NDWI");
var histogram = MNDWI_S2.reduceRegion({
reducer: ee.Reducer.histogram(),
geometry: roi,
scale: 30,
maxPixels: 1e13,
tileScale: 8
});
var threshold_S2 = otsu(histogram.get("NDWI"));
var mask = MNDWI_S2.gte(threshold_S2);
return image.addBands(mask.rename('mask'));
}
//运行水体掩模函数
newImgS2 = calNDWI(newImgS2)
newImgS2 = calWaterMask(newImgS2).select('mask')
print(newImgS2)
Map.addLayer(newImgS2, {min:0, max:1, palette:['#DDDDDD', '#0099FF']}, 'S2_Water_body_mask');
//下载非水体概率影像
Export.image.toDrive({
image:newImgS2,
description: 'S2_water_mask',
scale:30,
region:roi,
fileFormat: 'GeoTIFF',
maxPixels:1e13,
});
这段代码的目的是对Sentinel-2遥感影像进行处理,提取水体掩膜,并将结果可视化和导出。
-
首先,定义了一个变量roi,表示感兴趣区域(Region of Interest),这是一个表格(table)对象。然后使用Map.centerObject(roi,10)将该区域设置为地图的中心,并指定缩放级别为10。
-
接下来,定义了一个调色板(palette)数组,用于可视化图像时的颜色映射。
-
然后,定义了一个可视化参数rgbVis,设置了最小值(min)和最大值(max),以及要显示的波段(bands)。
-
之后,定义了一个函数roiClip,用于将图像按照矢量边界进行裁剪。
-
接着是一个函数remove_cloud,用于去除图像中的云和雾。函数内部使用了位掩码(bitmask)的方式来选择需要保留的像素,然后将图像的像素值除以10000并选择特定波段,最后将处理后的图像的时间属性复制到结果中。
-
然后定义了起始日期和结束日期,用于选择要处理的影像时间范围。
-
接下来,使用ee.ImageCollection函数选择了名为"COPERNICUS/S2_SR"的Sentinel-2影像集合,并通过一系列操作对影像进行筛选、裁剪和去除云,最后将结果映射到ROI区域,并存储在变量S2中。
-
之后,使用S2.max()函数选取ROI区域内同一天的影像,并将结果存储在变量newImgS2中。
-
接着,定义了一个名为calNDWI的函数,用于计算归一化水体指数(NDWI)。
-
然后,定义了一个名为otsu的函数,用于计算阈值,该阈值用于将图像的像素分为水体和非水体。
-
接下来,定义了一个名为calWaterMask的函数,该函数通过计算NDWI的直方图,并使用OTSU方法计算阈值来生成水体掩膜。
-
然后,分别调用calNDWI和calWaterMask函数对newImgS2进行处理,并将结果可视化。
-
最后,使用Export.image.toDrive函数将非水体概率影像导出到Google Drive中。
三、代码链接
https://code.earthengine.google.com/f145e92abf2d0196aba61655745bad9c?noload=true
四、OTSU算法详解
// OTSU计算阈值
// 此函数接受一个直方图作为输入,并使用OTSU算法计算出最佳阈值作为图像分割的阈值。
function otsu(histogram) {
// 从直方图中获取像素计数和桶均值数组
var counts = ee.Array(ee.Dictionary(histogram).get('histogram'));
var means = ee.Array(ee.Dictionary(histogram).get('bucketMeans'));
// 获取桶均值数组的长度,也就是直方图的桶数目
var size = means.length().get([0]);
// 计算像素总数
var total = counts.reduce(ee.Reducer.sum(), [0]).get([0]);
// 计算桶均值乘以像素计数的总和
var sum = means.multiply(counts).reduce(ee.Reducer.sum(), [0]).get([0]);
// 计算全局均值
var mean = sum.divide(total);
// 创建从1到size的索引列表
var indices = ee.List.sequence(1, size);
// 计算类间方差(between-class variance)
var bss = indices.map(function(i) {
// 将counts数组切片,获取前i个桶的像素计数
var aCounts = counts.slice(0, 0, i);
// 计算前i个桶的像素计数之和
var aCount = aCounts.reduce(ee.Reducer.sum(), [0]).get([0]);
// 将means数组切片,获取前i个桶的桶均值
var aMeans = means.slice(0, 0, i);
// 计算前i个桶的桶均值乘以像素计数的总和,然后除以像素计数之和
var aMean = aMeans.multiply(aCounts)
.reduce(ee.Reducer.sum(), [0]).get([0])
.divide(aCount);
// 计算后i个桶的像素计数之和
var bCount = total.subtract(aCount);
// 计算后i个桶的桶均值,公式为:(总和 - 前i个桶的像素计数之和 * 前i个桶的桶均值) / 后i个桶的像素计数之和
var bMean = sum.subtract(aCount.multiply(aMean)).divide(bCount);
// 计算类间方差
return aCount.multiply(aMean.subtract(mean).pow(2)).add(
bCount.multiply(bMean.subtract(mean).pow(2)));
});
// 将类间方差数组按照从小到大排序,获取最后一个(最大值),即最佳阈值
return means.sort(bss).get([-1]);
}
OTSU算法是一种自适应的图像阈值分割方法,它通过最大类间方差来选择最佳阈值。
具体步骤如下:
- 计算图像的灰度直方图。
- 计算总像素数和每个像素值的占比。
- 对每个像素值,计算类内方差,即以该像素值作为阈值进行分割时,前景和背景之间的方差。
- 选择使类内方差最大的像素值作为阈值。
- 利用该阈值将图像分割为前景和背景两部分。
这段代码的作用是实现OTSU算法的第4步,即计算类间方差并选择最佳阈值。



















 638
638

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











