









-
原文地址:系统与控制纵横 (amss.ac.cn)
“控制系统的历史悠久,没有人能确切知道第一个控制系统是什么时候发明的,但我们可以肯定地说,那时它一定没有被认为是一个‘控制系统’。因为控制太自然了,从抽象意义上说, 任何一个可以被另一个对象或过程改变的对象或过程都可以从控制系统的角度来查看。我们无法 确定人类是何时开始有目的地改变(控制)所生存的环境的”。
-
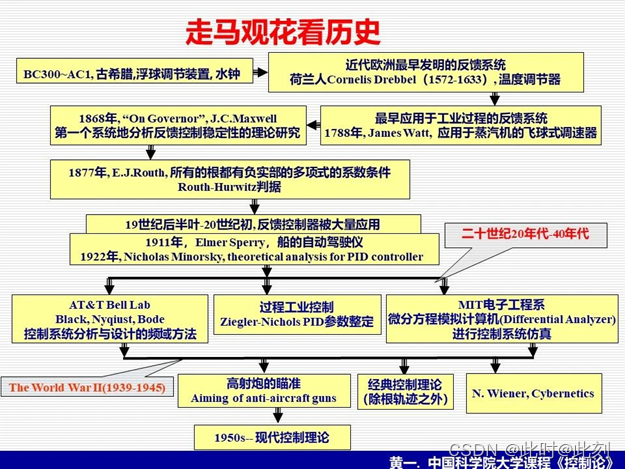
- 1、一般认为,最早的控制系统是公元前300年至公元1年古希腊人和阿拉伯人发明的浮球调节装置, 如水钟;
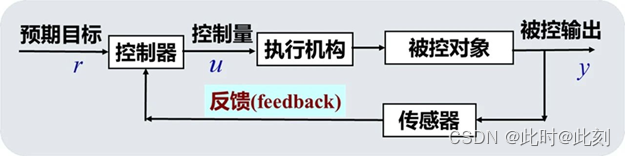
- 现在我们通常把闭环(反馈)控制系统分为传感器、控制器、执行机构、被控对象等几个基本组成部分,在浮球调节装置这个设计巧妙的控制系统中,传感器、控制器、执行机构是一体的。
-
- 中国古代计时器则有刻漏、水运浑天仪、水运仪象台等,中国古代著名的控制系统还有指南车、都江堰水利工程等。
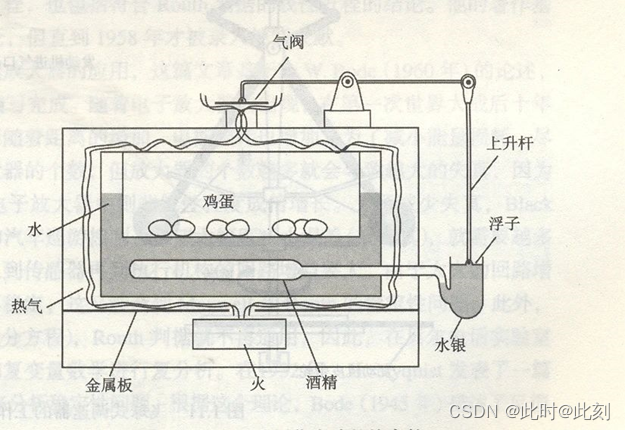
- 2、近代欧洲最早发明的反馈控制系统是荷兰人 Cornelis Drebbel(1572—1633)发明的培育箱温度调节器;
- 培育箱是双层的,中间有水,把热量均匀地传递给内层,温度传感器是一个内部装有酒精和水银的容器。当温度过高时,温度传感器的水银柱上升,阀门关闭,减少进气,降低温度;反之则水银柱下降,阀门打开,增加进气,提高温度。
-
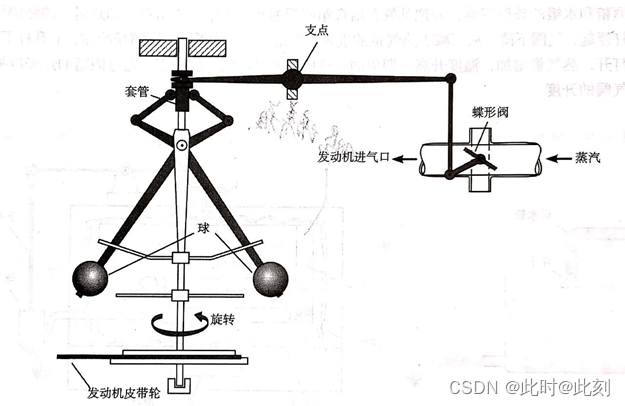
- 3、人们普遍认为最早应用于工业过程的控制器 是瓦特(James Watt,1736—1819)1788年应用于蒸汽机的飞球式调速器;
- 飞球式调速器(Fly-ball governor),也称为离心式调速器( centrifugal governor )。其工作原理:假定发动机运行在平衡状态,两个重球在与中心轴成某一给定角度的锥面上围绕轴旋转。当发动机负载增大时,它的速度减慢,两个重球下跌到更小的锥面上旋转,引起杠杆运动打开蒸汽室主阀(执行机构),从而增加进入的蒸汽量,以恢复减小的速度。因此,球与中心轴的角度是用来传感输出速度的。
-
-
- 飞球式调速器被认为是控制发展史上的一个里程碑。值得提出的是:飞球式调速器并不是瓦特发明的。关于应用离心力控制速度的研究,科学家惠更斯(Christiaan Huygens,1629-1695)和胡克(Robert Hooke,1635-1703)都曾钻研过这个问题,并设计了利用离心力控制速度的装置。
- 到18世纪,在蒸汽机之前,离心力调速器已经在风车上被大量应用。1788年瓦特从其合伙人博尔顿(Matthew Boulton)处了解到已经在风车中采用的飞球调速器,意识到可以改进后用到蒸汽机的转速控制,以保证蒸汽机的平稳运行,于是发明了采用飞球调速器的蒸汽机。
- 19世纪最初的70年,大量的工作围绕改进调速器展开,很多科学家需要采用性能更好的调速器来开展各自领域的研究工作,世界各地出现了大量调速器方面的专利。比的Fleeming Jenkin设计的调速器,在这个设计中,系统平衡点不再受负载外扰R 的影响,但却遇到了稳定性问题。19世纪早期出现了关于调速器“hunting(来回摆动,即不稳定)”行为的报告,人们开始努力分析调速器动态特性,寻找稳定(non-hunting)的条件。
- 人们对宇宙的探索对控制理论的发展起过很大的推动作用,甚至早于牛顿运动定律发表之前,天文学家是第一批着手解决动态系统稳定性问题的人,因为他们需要精确控制大型望远镜的运动而且他们熟悉太阳系中天体运动的稳定性问题。1893年,俄罗斯数学家A.M.Lyapunov发表了他著名的关于动态系统稳定性的博士论文,建立了非线性时变系统常微分方程理论,这个研究的出发点也是为了研究行星运动的稳定性问题。现代航天工程的发展更是极大地推动了控制理论的发展。
- 4、1868年, 麦克斯韦的论文《论调速器》(On Governor)系统地分析了几类调速器同时给出了稳定性条件,被认为是第一个系统地分析反馈控制系统的理论研究。
- Fuller认为麦克斯韦这篇论文的主要贡献是:
- 1.是系统地研究动态控制系统的第一篇论文;
- 2.采用了线性化技术研究运动系统的稳定性,从而通过特征方程判断系统的稳定性, 得到了三阶系统特征方程稳定的判据;
- 3.文中例子说明可以设计控制器即消除偏差又不致引起不稳定;
- 4.提出了寻找高阶系统稳定性判据的问题。
- Maxwell没有进一步得到更高阶特征方程的根都具有负实部的充要条件,他更大的兴趣还是在电磁学方面,Fuller甚至认为Maxwell写"On Governor"这篇论文就是为了可以让自己从控制问题中脱身,从而专心于电磁学的工作。但他把确定高阶特征方程的根都具有负实部的充要条件这一问题明确地提了出来,希望得到数学家的关注。在科学的发展中,准确地提出问题和解决问题同样重要。麦克斯韦提出的问题被他剑桥大学三一学院校友劳斯(E.J.Routh, 1831-1907, English mathematician)解决(1854年,劳斯与麦克斯韦以第一和第二的成绩毕业于剑桥)。
- Fuller认为麦克斯韦这篇论文的主要贡献是:
- 5、1877年, 劳斯得到特征方程所有根 都有负实部的多项式系数条件,Adolf Hurwitz (1859—1919,德国和瑞士数学家) 1895年也独立地推出了这个判据,因而它 被称为Routh-Hurwitz判据。
- 1877年Adams Prize(麦克斯韦为评奖委员会委员)的主题是the criterion of dynamical stability,劳斯获得了此奖,他解决了Maxwell提出的判断所有根都有负实部的多项式系数条件。
- 当时解决这个问题的代数工具已经被Augustin-Louis Cauchy,Charles Sturm和C. Hermite等人建立起来,Routh综合运用这些结果得到了动态系统稳定性理论。
- 虽然麦克斯韦和劳斯对调速器稳定性分析的结果可能并没有对具体改进离心力调速器的设计起到直接作用,但对控制科学有很大贡献,线性化技术与特征方程分析至今仍是控制系统稳定性分析的一个重要手段。
- 6、19世纪后半页至20世纪初, 反馈控制器被大量应用,包括电压、电流与频率的 调节、蒸汽发电中的锅炉控制、电机的速 度控制、 船与飞行器的驾驶与镇定、过 程工业中的温度、压力与流量控制等等;
- 随着控制系统用于许多不同的工程领域, 特别是一些复杂的机械装置,如船的自动 转向装置和锅炉控制(涉及液面、汽压等 多变量控制问题),控制设计问题变得突出起来,这时存在的主要问题有:缺乏通用语言来从理论 上理解动态系统的控制问题,缺乏简单的、容易运用的分析与设计方法。唯一可用的分析工具似乎只是微分方程和当时还不太广为人知的Routh-Hurwitz稳定性判据,但应用这个判据需要获取系统参数值,而且难以具体指导如何设 计出使系统稳定的控制器。
- 7、一些聪明的工程师如Elmer Sperry (1860—1930,美国发明家、企业家) 敏锐地注意到人进行控制调整时不是简单地采用开关控制(On-off Approach), 而是综合运用了预测、当被控量接近目标值时撤出控制、以及当存在持续的偏差时进行小幅度的慢慢调节等方法,于1911年设计出的采用较为复杂控制律——PID控制结合自动增益调整—的船舶自动驾驶仪,被认为是最早发明的PID控制器。
- 8、1922年, Nicholas Minorsky(1885—1970,俄国和美国工程师,应用科学家)从理论上清晰地分析了船在常值扰动下的自动驾驶问题,推导出了PID控制器形式。
- PID是迄今为止应用最广泛的一种控制方法,目前95%以上的过程控制回路和90%以上的航空航天控制回路还都是基于PID控制。2017年国际自动控制联合会(International Federation of Automatic Control,IFAC)的工业委员会对工业技术现状进行了调 查,在十几种控制方法中,PID以百分之百好评(零差评)的绝对优势居于榜首。
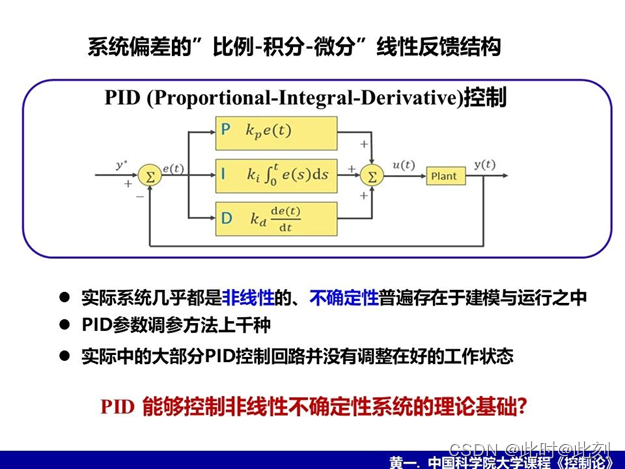
- 其实PID控制器的结构非常简单, 就是系统偏差的”比例-积分-微分”三项线性反馈结构之和,而实际系统几乎都是非线性的,而且不确定性普遍存在于实 际系统的建模与运行之中,那么简单的线性结构的PID控制为什 么能在实际中广泛应用于非线性不确定系统,它的理论基础是什么?另虽然PID只有三个参数,但至今PID调参方法已有上千种, 都是经验公式,而工程界依然认为实际中的大部分PID控制回路 并没有调整在好的工作状态, 那么如何调整才能达到令人满意的效果?这些可以说是控制理论中最基本的问题,一百多年来一 直没能从理论上给以很好回答。
-
- 通过研究某种自抗扰控制(Active Disturbance Rejection Control,ADRC) 的具体形式与PID控制的内在联系,一种可使PID具有自抗扰能力的新的定量调参方法被进一步提出来,新的PID调参方法是由ADRC启发而来,并不是直观容易想到的,但其物理功能却比原PID的三个参数更明确而易于整定;
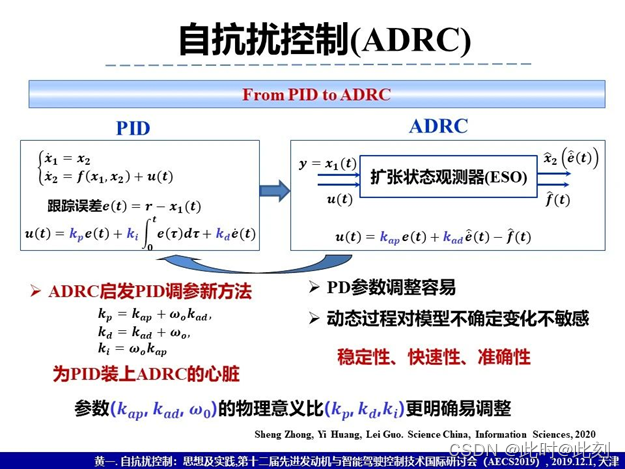
- 自抗扰控制由中国科学院系统科学研究所韩京清研究员于20世纪年代提出,正式 发表于1998年,作为在PID控制基础上的创新,其强大的鲁棒性和突出的瞬态响应性能,吸引着越来越多的关注,已发展为一种可解决具有大范围及复杂结构的不 确定系统控制问题的有效方法。
- 通过研究某种自抗扰控制(Active Disturbance Rejection Control,ADRC) 的具体形式与PID控制的内在联系,一种可使PID具有自抗扰能力的新的定量调参方法被进一步提出来,新的PID调参方法是由ADRC启发而来,并不是直观容易想到的,但其物理功能却比原PID的三个参数更明确而易于整定;
- 9、20世纪20~40年代,控制系统分析与设计的研究在不同国家的不同小组独立进行,在美国,最有影响的几项工作主要来自于以下几个群体
- 9.1、第一个群体是贝尔实验室(AT&T Bell Labs)的工程师以及科学家,发展出控制系统分析与设计的频域方法。
- 第一次世界大战后,随着电子放大器的出现,远距离通话成为 可能。距离增加,电能损耗也增加。为了增加传输距离,需要用直径较大的传输线或增加放大器的个数, 但放大器个数越多,因非线 性以及噪声造成的失真越大。1920年前后,放大问题已经成为开发 长距离电话技术的一个严重阻碍;
- 布莱克当时是AT&T的工程师,他深入研究了这个问题,他发明的负反馈放大器通过把输出的放大信号再反馈回输入端,就可以减小由于噪声和器件参数漂移造成的失真;
- 虽然反馈的原理在公元前300年古希腊人和阿拉伯人发明的浮球调节装置、17世纪的温度调节器、18世纪工业革命的标志——瓦特 蒸汽机中采用的飞球式调速器中就存在,但“反馈(feedback)”一 词被正式使用则是在布莱克发明负反馈放大器时。
- 而从负反馈放大器的发明到其实际应用则又经历了一段充满荆棘的漫长路途。
- 为了减小失真(误差)而引入的反馈装置,有可能会使得系统发出尖叫(Singing/ Oscillating)而变得不稳定(反馈的代价:系统复杂了,可能造成系统不稳定)。这又涉及到了麦克斯韦和劳斯研究过的稳定性问题,但这时, 系统的动态特性已经很复杂(通常是几十阶的高 阶微分方程),Routh-Hurwitz判据很难再有帮助 。贝尔电话实验室的通信工程师和科学家们开始考虑用频率响应(Frequency Response)和复变函数理论进行分析,发展出了控制系统分析与设计的频域方法。
- 负反馈放大器的发明及其发展被认为是发明 家、工程师与受过良好数学物理训练的理论研究 团队成功合作的杰出案例,其中有两个代表性 人物:哈里·奈奎斯特(Harry Nyquist,1889-1976)和亨德里克·博德(Hendrik Bode,1905-1982)
- Nyquist于1917年获得耶鲁大学物理学博士学 位,1917—1934年就职于AT&T。1928年, Nyquist 与AT&T的其他一些工程师一起与布莱克商讨如何将负反馈放大器用于一种新的电缆通信系统。 他做了负反馈系统的分析,并最终在频域上建立了一个与已有工作完全不同的稳定性判据—Nyquist判据,Nyquist判据可以直接指导如何调整控制器确保系统稳定。
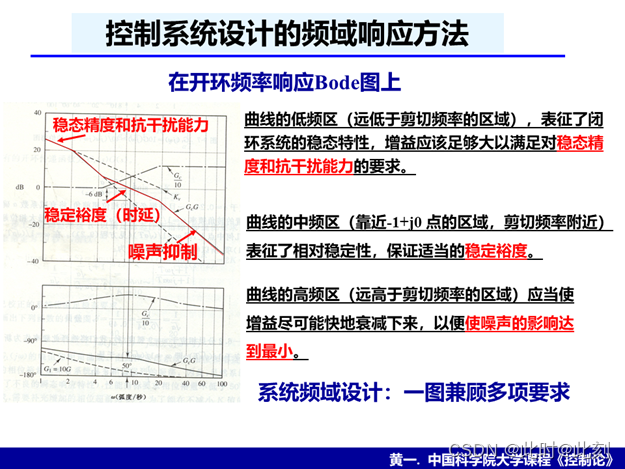
- Bode于1926年获得俄亥俄州立大学(Ohio State University)数学硕士学位,然后就职于贝尔实验 室,期间又于1935年取得哥伦比亚大学(Columbia University)物理博士学位。1928年,在开发一 种新的同轴电缆通信系统时,Bode带领一组数学家研究能充分利用Black放大器优点的系统设计方法。1940年,Bode在其经典论文“Relations Between Attenuation and Phase in Feedback Amplifier Design”中进一步提出了利用频域的Bode图、幅值裕度/相位裕度等相对稳定性概念来设计负反馈 放大器的方法,并指出了系统增益与带宽的极限关系。
- 贝尔实验室的工程师以及科学家团队的这些工作最终发展为控制系统分析与设计的频域方法。
- 控制系统分析与设计的频域方法至今还是控制工程师们最喜欢和信赖的一种方法,仍然在广 泛应用。频域方法可以摆脱处理微分方程的困难,直接通过系统频域响应的实验数据进行控制系统的分析与设计。还有一个重要原因是,虽然稳定性是控制系统设计中首当其冲的问题,但系 统仅有稳定性是不够的,一个好的控制系统除了 需要具有稳定性外,还应兼顾快速、准确性、抗 扰性等可能彼此冲突的性能指标,频域设计可以比较清楚地通过系统的频率响应Bode图同时在不同频段兼顾各项指标进行设计,简明而直接。
-
- 9.1、第一个群体是贝尔实验室(AT&T Bell Labs)的工程师以及科学家,发展出控制系统分析与设计的频域方法。
-
- 9.2、第二个群体在美国过程工业领域。20世纪30-40年代,美国过程工业中的工程师和科学家开始系统地建立和开发控制系统设计方法,一个代表性工作是 J. G. Ziegler和N. B.Nichols在1942年提出的PI及PID控制的参数整定方法,后来被称为Ziegler-Nichols调整法。
- 9.3、第三个群体在麻省理工学院(MIT)的电子工程系,设计了微分方程模拟计算机,进行控制系统仿真。
- 1930s, Vannevar Bush在MIT带领Harold Hazen,Gordon Brown和Claude Shannon设计了微分方程模拟计算机(the Differential Analyzer), 从而可以进行动态系统仿真。其后,Harold Hazen 和 Gordon Brown领导的小组利用模拟计算机进行了控制系统的时域仿真。
- 随着计算机技术的快速发展,计算机仿真在 控制研究中已经发挥着越来越重要的作用,不仅 仅是指学术论文中那种简单的仿真,虽然现在仿 真已经是大部分论文中的一个重要环节,计算机仿真更重要的价值还在于:
- 可以直接启发新的研究思路和灵感,当然由 仿真启发的新方法还需要经过艰难的严格理论论 证和严苛的物理实验的考验。
- 论证控制方法的重要手段。如今控制问题变 得越来越复杂,需要考虑的因素越来越多,传统 的理论分析手段难以彻底解决问题时,详尽充分 的计算机仿真已成为论证控制方法的重要手段。 比如,在航天工程中研究新的飞行方案时,稳定 裕度分析往往还需要结合大量拉偏参数以及考 虑各种物理器件约束的计算机动态仿真验证。因 此,我们也许应该思考理论分析的内涵是不是也 应该与时俱进。
- 10、二战后,经典控制技术基本建立起来
- 战后,经典控制技术基本建立起来了,是一 种针对单输入线性定常系统的设计方法。主要有以微分方程描述的系统特征根、以及上升时间、 超调、稳态误差和阻尼等指标表述系统性能的时域方法,和以带宽、谐振、幅值/相位裕度以及频域响应图展示系统行为的频域方法,有人喜欢时域方法,因为可以直观了解系统的实时行为,而 二战中的工作充分显示了频域响应方法在反馈系统设计上的威力。
- 战争中解决防空控制问题的经历也使人们进 一步认识到:
- 1. 将几种由不同小组设计的部件集成在一 起工作时,整个系统的性能就不那么依赖各个独 立单元的性能,而在于它们是否能很好地协同工 作。
- 2. 无论是通信工程师擅长使用的频域方法还是机械工程师喜欢的时域方法都不足以完成设 计,所需要的是能综合两者优点的方法。
- 3. 基于线性和确定性假设进行的控制系统设计存在局限,因为,实际系统都是非线性的,测 量包含误差和噪声,过程和环境存在不确定性, 带宽的约束、噪声的影响以及非线性特性都会给系统设计带来困难。
- 二战的防空问题与维纳的“控制论”和钱学 森的“工程控制论”
- 1940—1945年5年内,美国国防研究委员会 火控部(Fire Control Division,National Defense Research Committee)一共资助了80个研究项目, 经费数目最大也是最成功的一个($1.5million)是贝尔实验室的M-9射击指挥仪,经费最少的一个 项目($2325)是给维纳的“预测目标飞行模式 (How to Predict Flight Patterns)”,维纳从随机系统的角度进行研究。虽然维纳的项目研究 并未真正用于实际,但这个工作促使他进一步思 考有关反馈、信息、控制、输入、输出、自我平 衡、预测和滤波(Feedback, Information, Control, Input, Output, Stability, Homeostasis, Prediction, and Filtering)等问题,并最终创立Cybernetics(1948年出版了Cybernetics 这本著作)。维纳的 Cybernetics学说既有理性的抽象概念如控制、反馈,也有 丰富的想象力,如在人机关系方面,人与机器的融合,将 机器拟人化以及将人机械化。Cybernetics发表后,马上被 认为是一种新思想甚至新兴学科,而吸引了工程、数学、 生物、心理甚至社会、哲学、政治等众多领域的极大关注。
- 1954年,钱学森(1911-2009)以火箭的控制与制导 (Control and Guidance)等相关实际问题为应用背景,在 美国发表了具有更多数学描述的工程控制论(Engineering Cybernetics)。该书是钱学森在美国因政治迫害而被强迫滞留美国并部分失去自由的情况下完成的。1945年5月,钱学森加入美国空军科学咨询团,赴欧洲考察德国航空、火箭技术的发展情况,德国之行让钱学森深刻意识到控制与制导的重要性。1950年之后,当他因政 治迫害而无法再继续参与军事科技研究后,即将学术重点转移到这一新兴的理论领域,进行工程控制论的研究。
- 11、饱受争议的现代控制理论
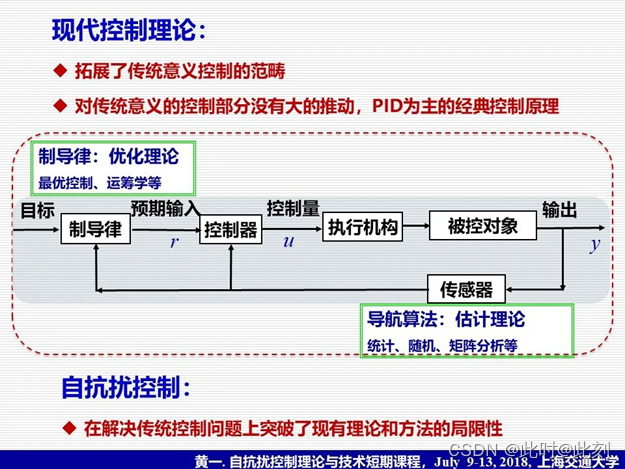
- 战后控制科学的发展更主要地受到两大因素的推动:一是美苏太空竞赛,二是数字计算机的出现,可以完成复杂的计算和动态系统仿真。 航天任务需要研究解决导弹与太空飞行器的发射(Launching)、机动(Maneuvering)、制导 (Guidance)及跟踪(Tracking)等问题,这个问题的特点是物理模型可以用一组一阶微分方程 (线性或非线性)描述,再就是航天器上装有具 备良好精度的测量装置(传感器)用于状态测 量、轨迹规划,于是发展出状态空间方法。
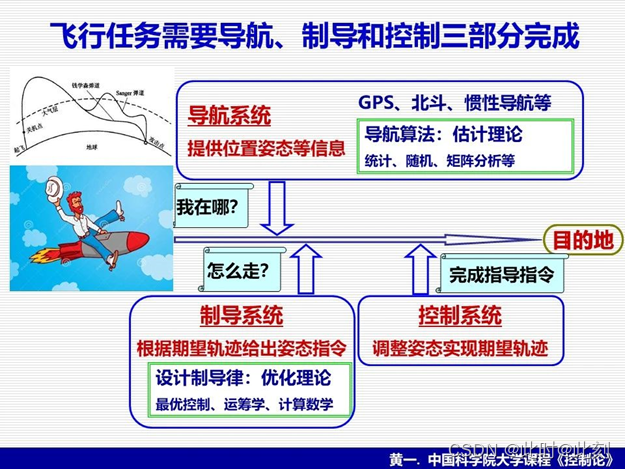
- 航天的控制系统跟以往控制系统相比要复 杂得多,飞行任务往往需要导航、制导和控制三部分协同完成。
-
- 导航系统相当于测量部分,完 成传感器测量及传感器信号的处理,以实时准确 地提供飞行器在飞行当中的各种状态(位置、速 度、姿态、角速度等);制导系统对应于给出预期运动指令的部分,根据飞行最终任务实时规划出当前飞行状态需要如何调整的指令值(通常为 姿态指令),此时,期望输入是实时生成的而不是事先确定的;最后的关键就是控制系统根据导航系统提供的当前飞行状态和制导系统提出的运动指令形成控制量调整飞行状态。
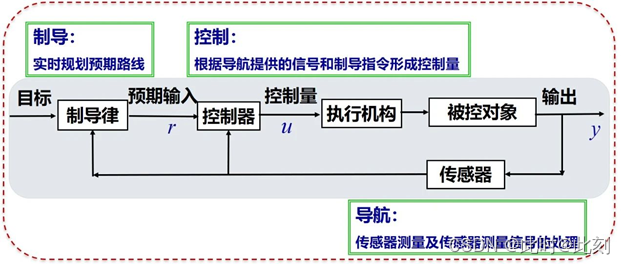
- 导航系统相当于测量部分,完 成传感器测量及传感器信号的处理,以实时准确 地提供飞行器在飞行当中的各种状态(位置、速 度、姿态、角速度等);制导系统对应于给出预期运动指令的部分,根据飞行最终任务实时规划出当前飞行状态需要如何调整的指令值(通常为 姿态指令),此时,期望输入是实时生成的而不是事先确定的;最后的关键就是控制系统根据导航系统提供的当前飞行状态和制导系统提出的运动指令形成控制量调整飞行状态。
- 12、航天任务的需求强力推动了现代控制理论的发展,贝尔曼的动态规划、庞特里亚金的极大值原理和卡尔曼滤波被认为是现代控制理论的三个代表性工作。
-
- 1948年—1952年,贝尔曼 (Richard Bellman, 1920—1984)在兰德公司(Rand Corporation)数学部工作,他在研究解决导弹部署以达到最大破坏力问题的过程中,提出了“最优性原理(Principle of Optimality)”和“动态规划(Dynamic Programming)”。
- 庞特里亚金 (Lev Semenovich Pontryagin, 1908—1988)是苏联数学家。航天飞行任务除了落点精度的要求外, 系统性能还涉及一些其他限制: 如时间最短或燃料消 耗最少等,Pontryagin 1956年提出的极大值原理是 关于这类最优控制问题的理论基础。
- Kalman滤波则是从带有噪声以及不完全测量的信号中提取所需信号的一种数学算法,Kalman滤波刚提出时曾受到很大质疑,直到1960年,卡尔曼(Rudolf Emil Kalman, 1930—2016)访问NASA Ames研究中心, 其后Kalman滤波成功地在阿波罗登月计划中得以应用。
- 几点感受
- 控制科学在不断解决实际问题中发展:麦克斯韦系统分析反馈控制稳定性的工作是由具体针对当时调速器的稳定性问题引申发展出来的;布莱克, 奈奎斯特和博德等人的频域分析与设计方法是为解决通信快速发展中出现的稳定性问题而发展起来的,甚至现代控制理论也是由于太空计划中的一系列难题推动的。因此,控制的研究要针对实际问题,对所研究的问题要有透彻的了解, 在创造性解决问题的过程中做出原创性的工作。
- 历史人物天才式贡献的背后是对钻研的热情和持续不断的努力:走马观花中愉快地在历史人物间穿行,流连忘返,被他们带着去探索各种问题,这是特别吸引我的部分,常常会有“他是怎么想出来的”的好奇,在这个过程中既感叹于他们的博学和才华, 也被他们钻研的热情和执着所打动,任何一点进展都不是一蹴而就的。
- 控制系统的研究通常在时域/复数域/频域多个域中展开:时域的状态空间和微分方程分析,复数域的传递函数和零极点分析,以及频率域的带宽和幅值/相位裕度分析,每一种方法都有其适用的范围、优点和局限,最好能综合掌握、灵活运用。
- 扩展阅读:
- 经典控制
- 经典控制理论是以传递函数为基础的一种控制理论,控制系统的分析与设计是建立在某种近似的和(或)试探的基础上的、控制对象一般是单输入单输出、线性定常系统:对多输入多输出系统、时变系统、非线性系统等。则无能为力。经典抑制理论主要的分析方法有频率特性分析法、根轨迹分析法、描述函数法、相平面法、波波夫法等。控制策略仅局限于反馈控制、PID控制等。这种控制不能实现最优控制。
- 现代控制
- 现代控制理论是建立在状态空间上的一种分析方法,它的数学模型主要是状态方程,控制系统的分析与设计是精确的。控制对象可以是单输入单输出控制系统。也可以是多输人多输出控制系统,可以是线件定常控制系统,也可以是非线性时变控制系统,可以是连续控制系统,也可以是离散和(或)数字控制系统。因此,现代控制理论的应用范围更加广泛。主要的控制策略有极点配置、状态反馈、输出反馈等。
- 由于现代控制理论的分析与设计方法的精确性,因此,现代控制可以得到最优控制。这些控制策略大多是建立在已知系统的基础之上的。严格来说。大部分的控制系统是一个完全未知或部分未知系统,这里包括系统本身参数未知、系统状态未知两个方面,同时被控制对象还受外界干扰、环境变化等的因素影响。
- 智能控制
- 智能控制是一种能更好地模仿人类智能的、非传统的控制方法,它采用的理论方法则主要来自自动控制理论、人工智能和运筹学等学科分支。内容包括最优控制、自适应控制、鲁棒控制、神经网络控制、模糊控制、专家系统控制、仿人控制等。其控制对象可以是已知系统也可以是未知系统,大多数的控制策略不仅能抑制外界干扰、环境变化、参数变化的影响,还能有效地消除模型化误差的影响。
- 经典控制


















10-29
09-09
 392
392
392
09-13
1936
1936

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











