






 该博客介绍了一个基于STM32的风向风速检测系统的设计,包括使用风速风向传感器和DHT11温湿度传感器获取环境数据,通过4线OLED液晶屏显示,并通过RS485进行数据传输。项目详细阐述了材料选择、原理图、PCB设计以及程序代码实现,特别是UART接口的配置和CRC校验的实现。
该博客介绍了一个基于STM32的风向风速检测系统的设计,包括使用风速风向传感器和DHT11温湿度传感器获取环境数据,通过4线OLED液晶屏显示,并通过RS485进行数据传输。项目详细阐述了材料选择、原理图、PCB设计以及程序代码实现,特别是UART接口的配置和CRC校验的实现。
目录
资料下载地址:基于STM32风向风速检测设计
一、视频
基于stm32的风速风向检测设计
二、项目功能概述
1、通过风向、风速传感器获取当前风向、风速
2、通过DHT11获取温湿度
3、OLED液晶显示测量数据
4、串口传输数据
三、材料选择
1、风速风向传感器
风速风向传感器输出方式选择RS485

2、DHT11温湿度传感器

3、4线OLED液晶屏
4、RS485模块
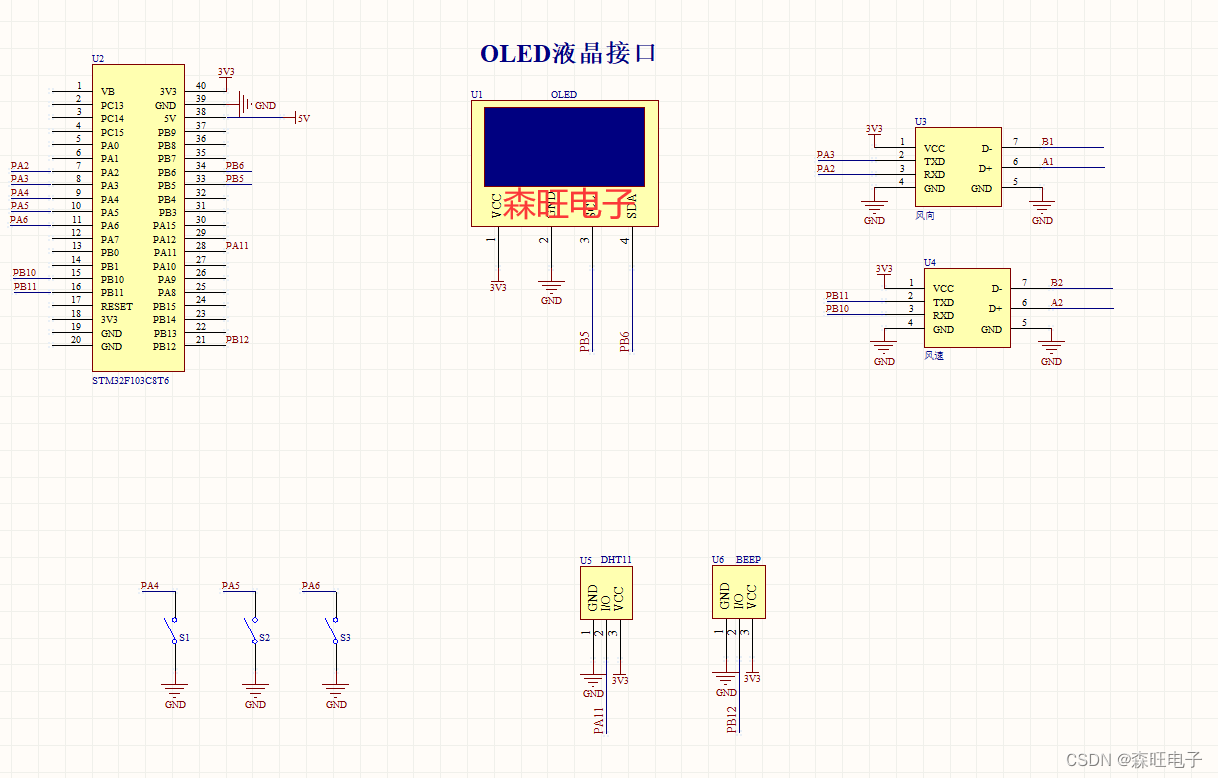
四、原理图和PCB

五、程序设计
RS485数据收发
#include "./usart/bsp_debug_usart.h"
#include "oled.h"
#include "string.h"
UART_HandleTypeDef UartHandle;
UART_HandleTypeDef huart1;
UART_HandleTypeDef huart2;
UART_HandleTypeDef huart3;
uint32_t mWindSpeed = 0;
uint32_t mWindDirec = 0;
_DEF_UART RS485_Uart1,RS485_Uart2,RS485_Uart3;
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
// Error_Handler();
}
huart2.Instance = USART2;
huart2.Init.BaudRate = 4800;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
// Error_Handler();
}
huart3.Instance = USART3;
huart3.Init.BaudRate = 4800;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
// Error_Handler();
}
__HAL_UART_DISABLE_IT(&huart1,UART_IT_TC);
__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);//使能接收中断
__HAL_UART_ENABLE_IT(&huart1,UART_IT_IDLE);//使能空闲中断
HAL_NVIC_SetPriority(USART1_IRQn, 5, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
__HAL_UART_CLEAR_IDLEFLAG(&huart1);
__HAL_UART_DISABLE_IT(&huart2,UART_IT_TC);
__HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE);//使能接收中断
__HAL_UART_ENABLE_IT(&huart2,UART_IT_IDLE);//使能空闲中断
HAL_NVIC_SetPriority(USART2_IRQn, 5, 0);
HAL_NVIC_EnableIRQ(USART2_IRQn);
__HAL_UART_CLEAR_IDLEFLAG(&huart2);
__HAL_UART_DISABLE_IT(&huart3,UART_IT_TC);
__HAL_UART_ENABLE_IT(&huart3, UART_IT_RXNE);//使能接收中断
__HAL_UART_ENABLE_IT(&huart3,UART_IT_IDLE);//使能空闲中断
HAL_NVIC_SetPriority(USART3_IRQn, 5, 0);
HAL_NVIC_EnableIRQ(USART3_IRQn);
__HAL_UART_CLEAR_IDLEFLAG(&huart3);
}
unsigned short CRC16(unsigned char* data,int count)
{
unsigned char CRC16Lo = 0xFF;
unsigned char CRC16Hi = 0xFF; //CRC???
unsigned char SaveHi;
unsigned char SaveLo;
unsigned char Flag = 0;
int i = 0;
for (; i < count; i++)
{
CRC16Lo = CRC16Lo ^ data[i]; //??????CRC???????
for (Flag = 0; Flag <= 7; Flag++)
{
SaveHi = CRC16Hi;
SaveLo = CRC16Lo;
CRC16Hi = CRC16Hi >> 1; //??????
CRC16Lo = CRC16Lo >> 1; //??????
if ((SaveHi & 0x01) == 0x01) //???????????1
{
CRC16Lo = CRC16Lo | 0x80; //???????????1
} //?????0
if ((SaveLo & 0x01) == 0x01) //??LSB?1,??????????
{
CRC16Hi = CRC16Hi ^ 0xA0;//???&HA001
CRC16Lo = CRC16Lo ^ 0x01;
}
}
}
return (CRC16Lo<<8)|CRC16Hi;
}
main.c
int main(void)
{
char ch = 0;
HAL_Init();
SystemClock_Config();/* 配置系统时钟为72 MHz */
RTC_CalendarConfig();
MX_USART1_UART_Init();
BASIC_TIMx_Init();
I2C_GPIO_Config();
DHT12_Init();
OLED_init();
OLED_full();
OLED_clear();
display();
delay_ms(2000);//
Get_Wind_Direct();
while (1)
{
Main_Uart1();
Main_Uart2();
Main_Uart3();
display();
sensor_read();
Get_Time();
delay_ms(1000);//
}
}


















 1183
1183

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











